1.江南机电设计研究所; 2.航天江南集团有限责任公司项目中心,贵阳, 550009
摘要:航向控制是一种控制导弹迎头与目标对飞并击中目标的制导控制方法。对于攻击具有拖曳式干扰的目标,根据目标和拖曳诱饵的特性,提出在弹上雷达开机前,目标必须落在导弹视线角方向,这样导弹攻击目标过程中不受拖曳式有源雷达诱饵干扰。本文利用地面雷达的目标和导弹测量信息,使导弹在中末制导段保证导弹逆目标飞行轨道飞行,使导引头始终测量到真实目标的运动信息与拖曳目标的运动信息基本相同,从而保证导弹对真实目标的有效攻击。
主题词:拖曳式干扰 航向控制
1 引言
现代空战中,在单机作战的情况下同样可以运用两点源干扰对抗单脉冲测角系统,比如拖曳式有源雷达诱饵干扰(Towed Radar Active Decoy, TRAD)。TRAD通过诱饵施放与载机回波相同的非相干信号,可以很容易地实现对地面雷达或导引头的跟踪干扰。
TRAD主要用于保护载机(目标)。诱饵通过拖曳线与载机配置在一起,处于雷达导引头的瞬时波束范围内。它能逼真地模拟载机的航速、航向及雷达反射特征,使单脉冲雷达跟踪系统无法通过运动特性来区分载机和诱饵,从而形成对导引头的两点源干扰。诱饵利用与载机具备的相同运动特性,可以成功地欺骗导引头雷达,提高载机在作战时的存活率。图1为拖曳式干扰示意图。
图1 拖曳式干扰示意图
目前,国内外对TRAD的研究并不多见。为了使导引头捕获真实目标,本文将航向控制应用于导引导弹攻击目标的过程,通过控制导弹的航向角,确保目标落在导弹速度方向的一定角度范围内,这种制导方法与原制导系统制导方法相结合,导引导弹准确命中真实目标。
2 抗拖曳式干扰的制导策略
一般的拖曳式干扰,是来袭飞机在飞行过程中,释放一假目标,该假目标通过线缆与飞机直接相连,距离约在50m~300m之间,由于假目标与飞机是固联的,因此,假目标的飞行速度特性与飞机一样,在位置上只相差50m~300m。为此,无论是地面雷达还是弹上半主动导引头,都不能从速度上区分飞机和拖曳目标;另外,一般导弹武器系统地面雷达对目标的距离分辨率,也很难从距离上区分出飞机和拖曳目标。
但若导弹逆着目标的飞行轨道飞行,那么进入导引头视场的飞机(真实目标)和拖曳干扰目标是重合的,这是导弹制导回路利用导引头的测量信息就可实现对真实目标的有效攻击。因此,针对抗拖曳式干扰,可采用逆轨道飞行的制导策略,利用地面雷达的目标和导弹测量信息,使导弹在中末制导段保证导弹逆目标飞行轨道飞行,使导引头始终测量到真实目标,从而保证导弹对真实目标的有效攻击。其抗拖曳式干扰的制导策略的示意图见图1。


















图1 抗拖曳式干扰的制导策略的示意图
图1描述了目标和导弹的飞行轨迹,其中D表示导弹,M表示真实目标,Mty表示拖曳干扰目标,其中的oxyz为参考惯性坐标系,这里采用北天东坐标系,若导弹按图1的轨道飞行,则真实目标M相对导弹的高低视线角和方位视线角与拖曳干扰目标Mty相对导弹的高低视线角和方位视线角基本相同,导引头测量的视线角速度是真实目标的视线角速度。
通过制导控制,将使视线方位角 与目标速度偏航角
与目标速度偏航角 的差逐渐减小,保证导弹逆目标轨道飞行,使得导引头能有效跟踪真实目标,为导弹制导回路提供真实的视线角速度测量信息,在抗拖曳式干扰时,采用逆轨道拦截和终端指令加权方法可实现对真实目标的有效攻击。
的差逐渐减小,保证导弹逆目标轨道飞行,使得导引头能有效跟踪真实目标,为导弹制导回路提供真实的视线角速度测量信息,在抗拖曳式干扰时,采用逆轨道拦截和终端指令加权方法可实现对真实目标的有效攻击。
4抗拖曳式干扰制导策略的仿真分析
应根据上面的抗拖曳式干扰制导策略,进行了制导控制系统的仿真,仿真弹道要素为:目标水平直飞,速度500m/s,飞行高度10km,飞行航路5km,遭遇距离22km,拖曳目标在真实目标后方100m。
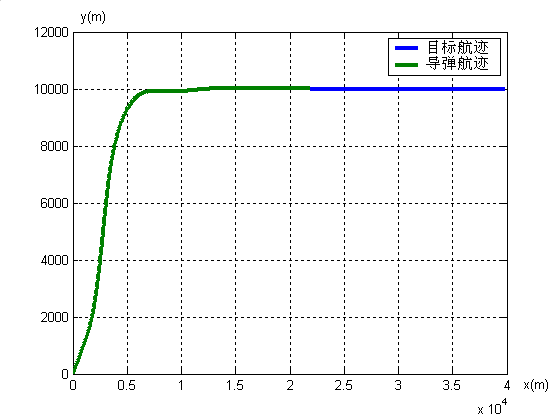
图1 导弹和目标飞行航迹
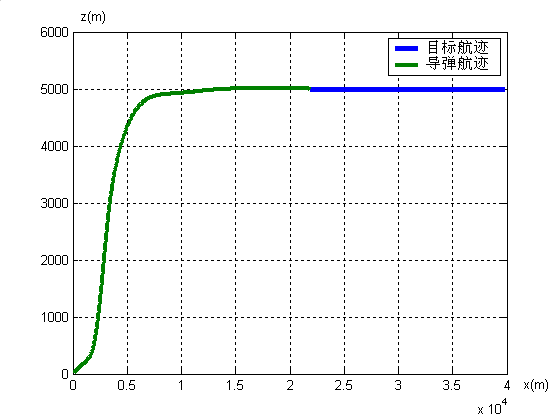
图2 导弹和目标飞行航迹
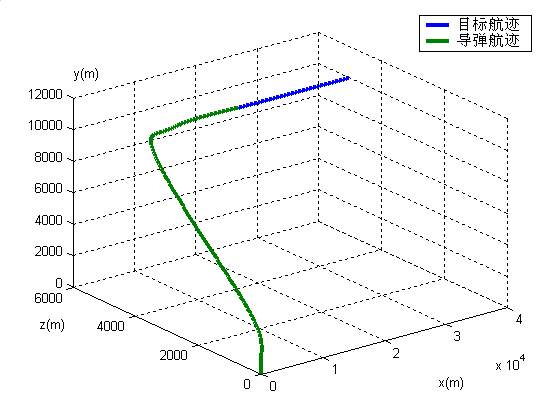
图3 导弹和目标飞行航迹
从上面的仿真结果可见,利用地面雷达对目标和导弹的测量信息,采用逆轨道拦截和终端指令加权方法,在抗拖曳式干扰时,可使弹上半主动导引头能有效跟踪真实目标,实现对真实目标的有效拦截。
5 结论
本文介绍了一种抗拖曳式干扰的制导方法,即在原制导控制系统的中末制导段加入航向控制的制导方法。仿真结果表明,这种方法可以有效地控制导弹沿着抗拖曳式诱饵干扰要求的弹道飞行,即导弹在中末制导段保证导弹逆目标飞行轨道飞行,使导引头始终测量到真实目标的运动信息与拖曳目标的运动信息基本相同,从而保证导弹对真实目标的有效攻击。
参考文献
[1] 李新国,方群,有翼导弹飞行力学,西安:西北工业大学出版社,2005
[2] 彭冠一等,防空导弹武器制导控制系统设计,北京:中国宇航出版社,2009
[3] 胡寿松,自动控制原理,北京:科学出版社,2001
[4] 吴森堂,费玉华,飞行控制系统,北京:北京航空航天大学出版社,2005
[5] 杨军,杨晨等,现代导弹制导控制系统设计,北京:航空工业出版社,2005

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



