武汉商学院机电工程学校 湖北武汉 430000
摘要:随着科技发展日新月异,越来越多样科技进入到百姓生活中,但是对于瓷砖美缝
这一领域,现在大多还靠着人工完成,费时费力并且效果并不理想,家庭装修中,为避免瓷砖缝隙堆积尘土滋生细菌,人们通常会选择对瓷砖进行美缝处理,目前瓷砖美缝的施工过程大多依靠手工操作,工作程序繁琐、工作量大、成本高、质量不稳定。此设计是专门针对瓷砖美缝而生产的一种自动循迹的机器人。
关键词:自动;美缝;机器人;设计
引言:瓷砖作为一种家居建材上的装饰材料,已经得到普遍的使用,当瓷砖贴在地面后,
由于瓷砖自身存在热胀冷缩的物理特性、瓷砖本身存在的尺寸误差、在施工时存在人为误差、一些特殊的工艺要求以及装饰效果等原因,需要在相邻的瓷砖之间留有缝隙,为了防止瓷砖缝隙由白变黑、滋生细菌、产生异味,需要在瓷砖的缝隙之间填充瓷砖美缝剂,对瓷砖缝隙进行美缝处理,其具有环保、防水、抗渗、不沾油的特性,并且可以和瓷砖一起擦洗,从而保证瓷砖“永不脏黑”,在装修过程中通常都是装饰工人进行人工美缝,但是人工作业效率低下,美缝剂填充不均匀,而且由于工人水平不同,出来的美缝效果差距也很大,因此需要一种新型的瓷砖美缝设备。为了解决上述问题,进而提供了一种自动循迹美缝机器人。
一、国外建筑机器人的研究现状
随着近几十年来建筑业的不断蓬勃发展,建筑机器人产业到目前为止已经涵盖了各个建筑领域,包括混凝土预制大板年生产线、外墙饰面装修及检查、地面压光机清扫等诸多领域。目前世界上许多国家进行着建筑机器人的相关研究工作,其中日本和美国是建筑机器人研制中的佼佼者,但是除了日本和美国之外,法国、德国、英国、以色列、荷兰、芬兰、丹麦、新加坡等国家也在进行相关领域的研究[21.这些国家有许多将智能机器人行业与建筑行业结合的科研机构、高校与研究所.
二、美缝的五大好处
1、美观
瓷砖美缝之后装饰效果特别强。美缝剂是由高科技含量新型聚会物材料+颜料及特种助剂精配而成,不同于白水泥、彩色填缝剂(干粉类水泥材料+低档颜料)主要由无机材料组成。它颜色丰富、自然细腻,具有光泽,与不同颜色的瓷砖相互搭配,能给家装带来更好的整体装饰效果。
2、实用
用美缝剂做完瓷砖美缝,凝固后表面光滑如瓷,强度高、耐磨、不沾脏污、有优异的自洁性,易清洁、一擦就净,可以和瓷砖一起擦洗;不易藏污纳垢,避免缝隙孳生霉菌危害人体健康。
3、耐用
瓷砖美缝之后,具有防水、防潮、防渗入的特性,可以真正让瓷砖缝“永不变黑”。
4、环保
瓷砖美缝之后就可以过上真正健康环保的生活。美缝剂是新型环保产品,所使用的材料先进,无味、不含苯、甲苯、二甲苯等有害成分。可以使您美丽的家室更加温馨、更加舒心,使您和家人的生活更加健康,更加环保。
5、方便清洁
在选择美缝的时候,业主肯定是考虑到遮丑这一方面,毕竟原先的瓷砖铺设后,会有很大的白条,看起来一点也不和谐。但是在做了美缝之后,就能够将这些缝隙很好地遮掩起来,那么垃圾碎屑就不容易掉进去,还能够保证家居的美观,让整个家居看起来更加的无懈可击。而且在客人来访时,总是能够感觉对室内的高大上,对业主的印象也上升了一个档次,是很多业主都会选择的一种装修方法。
6、不容易裂
美缝由于高度的缝合感,让瓷砖更加完美地贴合在一起,而且让地面更加地平整宽阔,所以瓷砖的坚固程度也能够上升到一定的层次,让瓷砖再经历了敲打之后,能够更加地结实可靠。当然了,在修补方面,很多师傅也束手无策,一定要找专业的师傅进行修补。
三、自动瓷砖美缝机概述
目前在国内美缝剂行业炽热化的情况下,国内一些做设备的厂家也正在研发一款能够替代人工的AI智能美缝机器人,现阶段研发出来的机器人已经实现了可以在平地上自由施工的技术了,不久大家将会看到上墙的美缝机器人,美缝师们再也不用爬高蹦底的施工了,全部可以自动机器做美缝,会很大程度的缩短人工。比如以前100个平方的房子做美缝一个人需要一天时间,但是AI机器人也许只需要2小时的时间就可以完成。这个时代不努力,不学习,取代你的一定不是同行,而是跨界打劫。
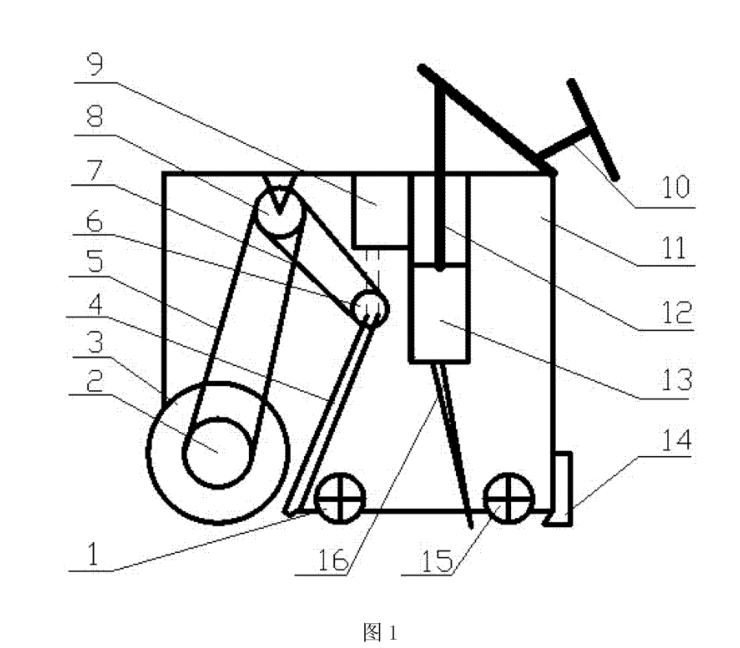
包括:定位滚轮1、传动轴2、打磨砂轮片3、吸尘管4、传动皮带5、吸尘风扇6、传动皮带7、电机8、尘土收集仓9、推动杆10、外壳11、压力活塞杆12、美缝剂仓13、找平刮刀14、滚轮15、注剂枪16.定位滚轮1是由一对同轴滚轮组成,在美缝机的左下端,滚轮有不同直径的可以更换,以便定位打磨砂轮片2的打磨深度;传动轴2带动打磨砂轮片3同轴转动,在美缝机的右前端,吸尘管4紧挨着打磨砂轮片3的右侧,吸尘管4通过吸尘风扇6和尘土收集仓9相通,尘土收集仓9在外壳11的上端中间位置;电机8固定在外壳11的上壁内侧,通过传动皮带5和传动皮带7为传动轴2和吸尘风扇6传输动力;美缝剂仓13为圆柱容器,下端连接注剂枪16,注剂枪16顶端可伸进地面瓷砖缝隙内;在压力活塞杆12在美缝剂仓上端,伸出外壳11,推动杆10和压力活塞杆12连接,在美缝机的最右上边;滚轮15为一对同轴滚轮,在美缝机的右下部,起到支撑滚动作用。如图1所示
四、地面瓷砖美缝机的工作方法
包括以下步骤:当瓷砖需要美缝时,将推车本体推至指定位置,首先调整清缝片的角度,盛灰箱的角度以及回收口下方的铲刀角度,将清缝片放置进瓷砖缝隙内,推动小车沿瓷砖缝隙方向行进,驱动驱动电机使清缝片对瓷砖缝隙进行灰尘清理,清理出的灰尘通过清扫机清扫至盛灰箱内,通过美纹纸贴纸机对瓷砖边缘进行贴纸处理防止美缝剂落在瓷砖上,将美缝剂从注剂管加入至美缝剂储存箱内,启动加压器对美缝器储存箱内部进行施压,美缝剂受压从出剂口流出至瓷砖缝隙内,压缝盘沿瓷砖缝隙方向转动,压缝环在瓷砖缝隙内对瓷砖缝隙内的美缝剂进行压匀压实处理,打磨块将压缝片在压缝过程中所造成的美缝剂粘连清理干净,瓷砖边缝周围的美缝剂通过回收口下方的铲刀铲入至回收箱内,通过回收箱内的回收层将回收的美缝剂储存,等美缝剂到达一定量时可将回收层取出将回收层里的美缝剂循环使用。
五、美缝机器人的设计的意义
地砖美缝机操作简单,体积小巧,并且将清缝、吸尘、美缝和压缝四道工序融合到一起,能够精准美缝,能够提高美缝人员效率,减少劳动力、降低工人劳动强度;抬升机构采用齿轮齿条传动,传动效率高,在美缝的过程中可以精准的实现寂寥装置的上升和下降;平移机构采用同步带传动,传动比大,可以快速的实现抬升机构和挤料机构的前后移动;挤料机构采用电动推杆为动力源,快速稳定,可以精准的控制美缝剂出料的多少和快慢,避免材料的浪费,从而实现高效精准的美缝;清缝机构采用电机带动一对啮合的齿轮实现清缝刀的转动,可以是清缝刀更有力的清除地砖缝隙内的垃圾杂物;在清缝机构的后方装有小型吸尘器,可以及时地将清理出来的杂物打扫干净,方便后续的美缝工作继续进行。底盘行走机构采用了全向轮,可是使地砖美缝机全方位的移动。
美缝机器人的设计的作用
1.通过推动推车本体到指定瓷砖缝隙位置后,通过设置在推车本体正前方的清缝机构对瓷砖缝隙进行清理打扫,通过设置在推车本体中间位置上的美缝机构对瓷砖缝隙进行美缝处理,通过设置在推车本体后方的回收机构对多余的美缝剂进行回收处理,实现了整个瓷砖美缝操作一体化以及美缝剂经常造成浪费以及瓷砖缝隙内的美缝剂没有压匀压实导致看起来很不美观的问题。
2,通过使用加压器对美缝剂储存箱内部进行加压,使美缝剂从出剂管口中均匀流出,在使用美缝贴纸机对瓷砖缝隙两边进行贴纸处理防止美缝剂流落至瓷砖缝隙外后不能使用。
3,通过使用压缝组件将瓷砖缝隙内的美缝剂进行压匀压实处理,使整个美缝处理结束后瓷砖缝隙看起来更加清爽美观。
4,通过设置回收机构将瓷砖缝隙周边的美缝剂回收至回收箱内,通过回收箱可以将回收的美缝剂取出进行二次使用,防止浪费。
5,通过在压缝片后方设有打磨块用来对压缝片进行打磨清理,防止在压缝组件在压缝过程中美缝剂残留在压缝片上不易于清理回收。
6,通过清缝组件对瓷砖缝隙进行清理打扫后使瓷砖缝隙内保持干净利于美缝。
结论语展望
1.论文结论
从实用角度出发,介绍了新款瓷砖美缝机器人的机械结构与功能实现,随着人工智能机器美缝的出现,美缝师这个行业将会更加轻松,不再是比拼耐力的时代,但却是谁先掌握新技术,新施工方法,谁就能最先分到一杯羹汤。未来美缝师这个行业不仅仅是创造艺术缝隙的行业,也是智能化比拼速度的时代。该机器结构清晰,思路明了,功能全面,对实际美缝作业技术具有一定改良作用。
论文展望
机器人是世界上一次重大创新发明。机器人从出现到应用,不断地创新发展,深刻地影响着生活的各个方面,尤其深刻影响了工业的生产方式。这使得传统工业不断升级,进而改变了人们的生产方式,提高了工作效率,逐渐完善了我们的生活[21.随着机器人技术的发展,在建筑和装潢行业也出现了机器人的身影。利用机器人瓷砖美缝不但效率高而且作业质量也比人工好并且质量。所以,我们需要加快开发出一款能够自动粘瓷砖美缝的自动化设备,实现瓷砖美缝完全自动化替代传统作业方式,减小压力,提高效率。因此,国内外研究学者就开始了对瓷砖美缝机器人的研究。如果将瓷砖美缝机器人用于实际工作中,可以大大降低作业强度,减轻工人的工作量,提高整体的工作效率、加快工作进度,而且从长远来看,既降低了成本支出,又促进了建筑行业的发展。
参考文献:
[1] 张雨滋. 智能发热瓷砖组装机器人模块化设计[J]. 中外企业家, 2020, No.672(10):158-158.
[2] 李房云, 赵巍, 孙明秀. 基于STC15的智能保洁机器人设计与仿真[J]. 计算机产品与流通, 2018(10):82-82.
[3] 唐振韬, 邓黄俊, 陈岱,等. 一种基于Kinect的智能家居机器人设计[J]. 2014.
[4] 王薪鉴. 可视卸砖机器人的设计仿真和应用研究[D]. 南昌大学.
[5] 裴晓锐, 廖维. 基于Pro/e的家庭清洁机器人虚拟设计[C]// 2011年机械电子学学术会议论文集. 2011.
[6] 王立言. 智能保洁机器人电气系统设计[D]. 成都理工大学, 2017.
[7] 郝永江, 王春军, 秦明明,等. 智能餐厅服务系统机器人设计[J]. 科技视界, 2014.
作者简介:陈晓航(1986.3),男 汉族 河南南阳人 武汉商学院 讲师 机械设计基础教学
课题:《一种自动美缝机器人》武汉商学院大学生创新项目202111654104

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



