中交 (广州 )建设有限公司,广东,广州, 511458
摘要:在桥梁施工中,测量精度要求比较高,工序比较复杂,测量任务也比较繁杂。为了提高测量的工作效率,在智能手机及移动互联网辅助下,运用测量员软件,通过蓝牙连接全站仪,对佛山市顺德区环湖路桂畔海大桥进行桩基放样、承台放样、挂篮定位、合龙测量等,测量的成果满足质量要求,同时测量的效率也得到了提高。测量员软件可以使繁杂的测量工作变得高效、快捷,也是实现测量数字化和精细化的手段之一。
关键词:测量员软件;桩基放样;承台放样;挂篮定位;合龙测量
桂畔海大桥主桥横跨桂畔海河道,起于K1+095,止于K1+235,总长140m,位于路线的直线段。9#墩~12#墩,桥跨为40m+60m+40m,单幅桥宽17.25m,桥墩与路线90˚正交。上部结构为40m+60m+40m预应力砼连续刚构,采用悬臂浇筑法施工。主墩下部结构为9.95m宽、1.7m厚板墩,在墩顶3.5m高范围内宽度渐变到11.95m,与上部箱梁底板固结,墩高约13.5m。基础采用6根D1.8m群桩基础,桩基嵌岩,嵌入中风化层深度不少于4d。主墩承台为水上分离式承台,承台平面尺寸为11.9m×7.4m,厚度2.5m。河道水流缓慢,河床淤泥层较厚。
使用测量员软件的各个程序之前应设置好参数。根据设计图纸,本线路平曲线采用交点法,高程设计线位置为平面设计线位置,无断链,无超高,无加宽。在项目界面中输入平曲线、竖曲线、标准横断面等参数。
桩基放样包括桩位放线、护筒偏位及护筒顶标高测量等。桩位放线,在钻孔平台上精确放出桩基的中心位置。打开测量员软件中的已知点放样程序,输入桩基的设计坐标,点击观测按钮,全站仪执行测量,把坐标反馈到测量员软件,测量员软件马上计算出里程方向及左右幅移动的距离,然后指挥跑杆者移动。重复观测,直至偏差在±5mm之内做好标志。通过十字交叉线做好点位护桩。平台开孔后,根据护桩至桩中心的距离与护筒半径的差值,在平台上焊接定位牛腿。护筒下放过程中,两台经纬仪在两个相互垂直的方向,用经纬仪十字丝竖丝上下相切护筒,控制护筒垂直度。护筒下沉到位后,在护筒上测量4个点的坐标,用测量员软件的圆心拟合程序计算护筒中心坐标及半径,通过与设计坐标对比得到护筒偏位。并取其中一点的标高作为钻孔深度及孔底标高的控制基准点。以10#墩Z10-1桩为例,设计坐标为X=2523798.251,Y=428668.751。放线结果见图1,护筒中心拟合坐标见图2。
主桥承台为水上分离式承台,采用钢板桩围堰施工。施打钢板桩前,运用导向架进行定位。根据设计图纸,计算钢围堰角点的里程及偏距。在牛腿上(焊接在钢护筒的)放出钢围堰的控制边线,延伸相交定出钢围堰角点。在牛腿上放点时,用测量员软件的坐标反算里程程序,计算实测点的里程及偏距。长边放线时,指挥跑尺人移动到长边的设计里程即可。短边放线时,指挥跑尺人移动到短边的设计偏距即可。10#墩钢板桩围堰导向架大里程侧设计里程为K1+140.2,放线结果见图3。


 图1 桩位放线 图2 护筒中心拟合
图1 桩位放线 图2 护筒中心拟合
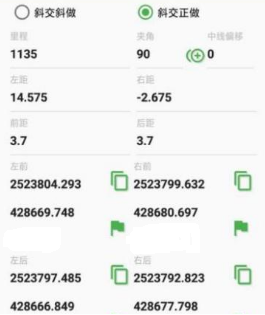
图3 导向架放线 图 4 承台平面坐标计算
垫层完成后,在垫层上放出承台角点,并记录实测标高,作为立模的控制基准。以10#墩左幅承台为例,在测量员软件的简易构造物程序中,选择斜交正做,输入10#墩的里程K1+135,夹角90˚,左距14.575,右距-2.675(因承台右边在路线左侧,右距应加上“-”号),前距3.700,后距3.700,点击计算按钮得到承台四个角点设计坐标,点击批量放样按钮进行承台角点放样。 承台平面坐标计算见图4 。
主桥上构悬臂浇筑法采用菱形挂篮施工,挂篮断面见图5。
为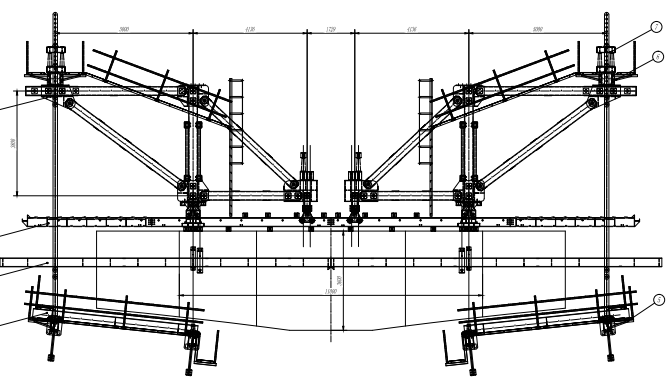 了保证桥面的平整度,顺利合龙,梁面标高控制极其重要。确定每一节段的立模标高又是重中之重。测量点位见图6。
了保证桥面的平整度,顺利合龙,梁面标高控制极其重要。确定每一节段的立模标高又是重中之重。测量点位见图6。
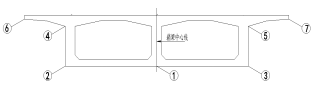
图5 挂篮断面图 图6 测量点位
根据设计图纸计算每节段的里程桩号、箱梁中心线偏距、设计高程、预拱度等数据。预拱度根据式(1)计算:
![]() (1)
(1)
式中,f1—竣工前预拱度预设值 (mm),由第三方监控单位提供;
f2—竣工后预拱度预设值(mm),由设计单位提供;
f3—挂篮变形值(mm),由施工单位提供。
立模标高根据式(2)计算:
立模标高=设计高程+![]() (2)
(2)
每节段施工之前,由第三方监测单位提供立模标高。施工单位对立模标高进行复核,复核无误后方可使用。
立模标高误差应控制在±5mm 内,挂篮定位、测量应在早晨 7:00 以前进行,避免日照影响;如确有必要在白天进行挂篮定位,则必须在第二天早上 7:00 以前进行挂篮定位的复测、复调工作,确保立模不受日照影响。
在已完成的节段端头架设全站仪,采用后方交会法进行设站,设站完毕后,校核第三点,精度满足要求方可进行放线作业。挂篮初步就位后,测量底板前端轴线位置。用测量员软件的坐标反算里程程序反算轴线的里程与偏距,与底板轴线的设计偏距对比,得到差值。指挥施工班组进行调整。调整后复测,若偏差不满足要求,则应继续调整,直至轴线偏位小于10mm为止。同时以测量底板边线偏位为校核。确保底板轴线与边线偏位均小于10mm。以左幅10#中跨第一节段为例,设计里程是K1+143.50 ,底板轴线①#点的偏距为-8.625m,梁高2.800m,梁底立模高程为14.521m。底板平面定位结果见图8。
底板平面位置调整到位后,在底板上放出①#~③#测量点,测出实际标高,与立模标高对比,得到差值,根据差值上下调节底模。调节后,重新放出①#~③#测量点,实测标高,计算差值。若偏差超限,则继续调整,直至标高偏差在±5mm以内。底板标高调整过程中,轴线偏位超限的,要进行横向调整。保证底板的平面位置与标高均要符合规范的要求。在测量员软件的里程计算坐标程序中,输入底板内边②#点的设计里程K1+143.50、偏距-2.65m、层厚2.883m(层厚=桥面铺装0.100m+节段面截面梁高2.800m-预拱度0.017m),进行观测。底板高程定位结果见图9。

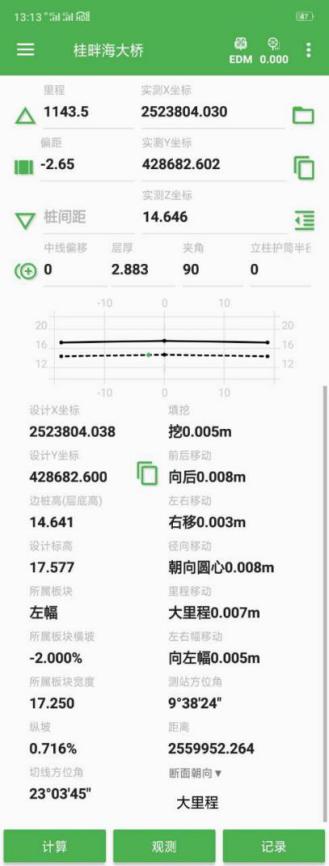
图8 底板平面定位 图9 底板高程定位
用全站仪免棱镜模式在腹板模板顶放出④#、⑤#点的设计里程,根据实测标高与立模标高对比的差值,进行上下调节。标高合格后,模板底口紧贴底板,上口横向调整。根据底口偏距与上口偏距的差值进行垂直度调整,直至垂直度小于0.3%为止。垂直度合格后,应复测④#、⑤#点的标高是否合格。不合格则重新调整,直至标高与垂直度均合格为止。
腹板定位完成后,进行翼缘板定位。先把放出翼缘板⑥#、⑦#点的平面位置,测出标高,与立模标高对比,得到差值。根据标高差值上下调节模板。调整后重新放出平面位置,若标高偏差不在±5mm范围内,应继续调整,直至标高偏差在±5mm范围内。
主桥合龙过程中,施工单位主要监测墩顶位移,其它监测项目由第三方监测单位完成。
墩顶位移监测采用全站仪坐标法监测。分别在左幅、右幅10#墩、11#墩0#块墩顶位置布置坐标位移监测点,用于监测墩顶的位移值;顶推时,用游标卡尺测量千斤顶的行程位移进行校核。用测量员软件的坐标反算里程程序,把监测点的每次测量坐标值反算出里程,通过与初始值的里程对比,可得到墩顶的位移。墩顶累计位移见表3。
表3 墩顶累计位移成果表
桥幅 | 桥墩 | 位置 | 累计位移/mm | 长度变化/mm | 长度变化设计值/mm |
左幅 | 10# | 墩顶 | -2.2 | 4.7 | 5.0 |
11# | 墩顶 | 2.5 | |||
右幅 | 10# | 墩顶 | -2.6 | 4.2 | 5.0 |
11# | 墩顶 | 1.6 |
表中,累计位移负值表示往小里程移动,正值表示往大里程移动,长度变化正值表示增长。
测量员软件集计算、外业测量于一身,结合测量仪器,可以使测量作业变得更加直观、更加高效、更加快捷。结合互联网,可以使测量成果的共享变得更加快捷。但也要注意以下问题:
1、测量员软件通过蓝牙连接全站仪后,可以获取全站仪的大部分信息,但当气泡超出倾斜补偿范围时,也能控制全站仪测量,此时的测量结果会存在较大误差。测量时,必须保持脚架与仪器稳定;
2、放样前,必须选择相应的路线,才能获得里程方向和左右幅方向的正确偏差。
[1] 陆鹏.基于智能手机的测量计算器软件开发[J].测绘技术装备,2012,4(6):8-9
[2] 王敬涛.谈手机APP在路桥工程测量中的应用[J].四川水力发电,2017(02):1-3
[3] 库胜平,王虎,吕江.测量员APP软件在地铁施工测量中的应用[J].云南水力发电,2017(06):4-5
[4]杨旭.手机App在路桥工程测量中的应用[J].交通世界,2021(10):34-35
4

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



