新疆富远信义勘测规划设计有限公司 新疆 伊宁 835000
摘要:基于倾斜摄影测量的内外业技术,可以应用于“多测合一”测绘中的竣工验收测量。其测量精度可以满足测量要求,可以减少外业作业工作量。在作业效率方面要高于传统测绘,但也存在一定的弊端,如倾斜摄影测量无法对建筑面积核实、综合地下管线进行测绘。因此,倾斜摄影测量可以配合传统测量,作为“多测合一”测绘中的一个辅助作业手段,进行外业数据采集。
为进一步推动优化营商环境,缩短建设工程竣工测绘时间,有效提升测绘技术单位的服务水平,福建省自然资源厅、住建厅、人防办、消防救援总队联合下发《福建省推进工程建设项目“多测合一”工作实施方案》,提出在工程建设项目行政审批测绘中介服务领域推行“多测合一”。随着“多测合一”工作的推进,建设工程竣工测绘时间缩短,对测绘作业效率和成果质量有了更高的要求。传统的测绘作业采用全站仪、rtk进行数据采集,作业效率低。而无人机倾斜摄影测量技术在数据采集中可以获得全要素、高精度、高效率的数据,因此,本文以无人机倾斜摄影测量为主,辅以传统的测绘作业方法。通过建设工程竣工测绘的现场作业,为“多测合一”测绘提供一种新的作业方式。
1 倾斜摄影测量技术
1.1 倾斜摄影测量简介
倾斜摄影测量是在传统摄影测量基础上,将传统的单镜头进行升级,搭载多镜头进行多角度摄影测量的改进技术。该技术可以获取传统摄影测量无法获取的地物信息,使用内业处理软件对采集的影像数据、像控点数据、POS数据进行处理,得到具有高度现实感的三维模型。该技术数据采集方式如图1所示。
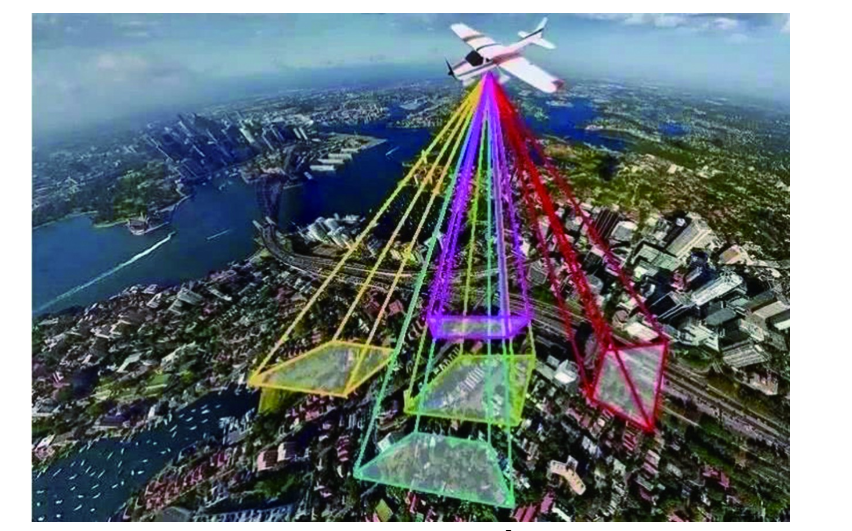
图1 倾斜摄影测量技术数据采集方式
1.2 倾斜摄影测量航摄参数设置
(1)航摄高度
航摄高度的确定需要根据项目的实际情况及相关任务、技术设计书,选取合适的地面分辨率,然后计算航摄高度。地面分辨率的选取如表1所示,航摄高度的计算如式(1)。
H=f×VGA/a (1)
式中:H为航摄高度(m);f为倾斜相机镜头焦距(mm);VGA为地面分辨率(m);a为像元尺寸(mm)。
表1 测图比例尺与地面分辨率对比表

(1)像片重叠率
航摄像片重叠率是倾斜摄影测量参数设置过程中的一个关键因素,参数设置的好坏直接关系到空中三角测量的精度及模型的质量。《低空数字航空摄影规范》(CHZ3005-2010)7.1.1对像片重叠率做出了相关技术要求,但根据不同的项目实际情况,部分项目对像片重叠度要求更高。因此,要在保证像片质量的前提下,选择合适的像片重叠率。像片重叠率的计算公式如下所示:
式中:Px、Qy为航摄像片上各点航向重叠率和旁向重叠率;P′x、Q′y为航摄像片上标准航向重叠率和旁向重叠率;Δh为相对摄影基准面之间的高差,H为航摄高度。
由式(2)、式(3)可知,Δh是决定Px、P′x ,Qy、Q′y是否相等的关键参数,当Δh=0时,Px=P′x,Qy=Q′y。因此,在设置像片重叠率的过程中,需要考虑相对摄影基准面之间的高差,从而符合规范要求。
(2)摄影基线长
摄影基线为2个立体相对摄影基站之间的连线距离。摄影基线长的计算公式如下所示:
L=(1−Px)×H×cfL=(1-Ρx)×Η×cf (3)
式中:L为摄影基线长;Px为航向重叠率;H为航摄高度,c为航向方向传感器尺寸;f为倾斜相机镜头焦距。
2 倾斜摄影测量关键技术
2.1 多视影像预处理
倾斜摄影测量镜头大多数选用非量测镜头(面阵CCD),因此航摄像片的几何变形主要是由于镜头畸变导致。像片的几何变形会导致影像产生几何误差。多视影像预处理技术,就是对航摄像片进行几何校正,从而减弱影像的几何误差。
(1)径向畸变纠正
径向畸变纠正公式为:
式中:r=x20+−−−−√y20r=x02+y02;(x0,y0)是以像主点为坐标原点的影像坐标,k1,k2,k3为倾斜摄影测量镜头的径向畸变参数。
(2)切向畸变纠正
切向畸变纠正公式为:
式中:P1,P2为倾斜摄影测量镜头的径向畸变参数。
(3)面阵CCD变形纠正
面阵CCD变形纠正公式为:
式中:α、β为倾斜摄影测量镜头的畸变差改正数。
将上诉3种畸变纠正数代入式(7),可以得到倾斜摄影测量镜头总的畸变纠正数:
获得上述7个畸变纠正数,然后将7个畸变参数代入对应的纠正方程,即可完成畸变差纠正。
2.2 多视影像联合平差
通过采用多视影像联合平差对航摄像片的几何变形和影像遮挡进行处理。选用POS数据中所获取的倾斜摄影像片的外方位元素,在每一级像片上采用金字塔匹配策略,由粗到精进行同名点的自动匹配和区域网光束法平差,可以得到精度较高的同名点匹配结果。为了确保平差结果可以满足精度的要求,还需要使用联合平差建立误差方程,对连接点、连接线、POS数据以及GPS/IMU辅助数据进行解算。将已知观测值和待求未知数建立在统一的三维笛卡尔坐标系中,组成误差方程,作为光束法平差基础的共线方程式。其误差方程式如式(8)所示:
V=At+BX-IP (8)
式中:A、B为对应的系数矩阵;t为影像定向的未知数向;X为影像坐标的未知数向量;I表示影像坐标观测值向量;P为影像坐标观测值权矩阵。
2.3 多视影像匹配
倾斜摄影测量相对传统的垂直航空摄影测量,存在地物之间几何变化较大、影像旋转以及地物点特征信息差异较大等问题。在进行影像匹配过程中,如果采用传统匹配模型和算法,匹配的可靠性就会大大降低,甚至无法进行匹配。倾斜摄影测量多视影像匹配技术可以解决上述问题。
以传统的摄影测量加密时选用严密的光束法进行区域平差,其采用的函数模型的共线方程如式(9)所示。
式中:(Xsi,Ysi,Zsi)为第i片影像的投影中心;ai,bi,ci(i=1,2,3)为第i片影像的旋转矩阵元素。将公式作为约束条件,当i=0时,点P和p0在同一条直线上。
3 项目测试
3.1 项目概况
“多测合一”测量主要的工作内容有:竣工验收、不动产登记所涉及的规划核实测量、绿地测量、人防测量、消防测量、地下管线测量、用地复核测量、宗地测量和房产测绘。本研究以福州市某新建住宅小区竣工验收测量为研究对象,该项目宗地总面积611 003 m2,总建筑面积17.5万 m2,规划8栋高层,1265户。使用大疆(悟2系列)无人机搭载禅思X4云台相机进行倾斜摄影测量,工程采用航摄参数为:航向重叠80%,旁向重叠65%,飞行高度135 m, 对地面分辨率0.04 m, 云台倾斜角度为45°飞行方式采用“井”字形飞行,如图2所示。
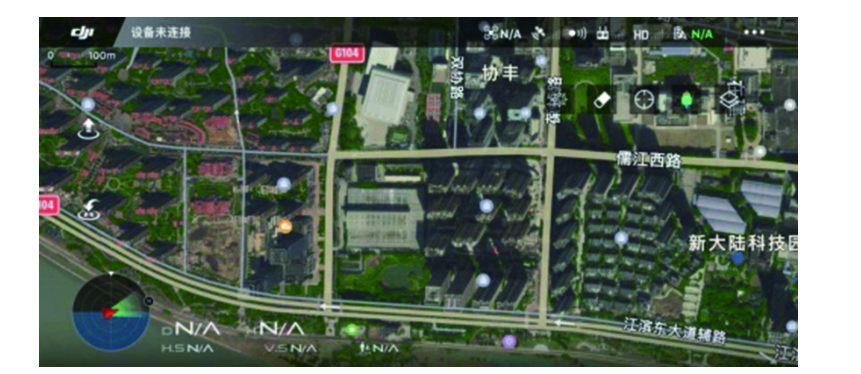
图2 航摄区域示意图
3.2 “多测合一”测量技术路线
研究的主要技术路线为:在试验区布设像控点,并进行像控点测量及特征点采集;根据相关技术标准进行外业飞行方案的设计;进行外业影像数据的采集;制作DOM、三维模型及数字线画图。其技术路线如图3所示。
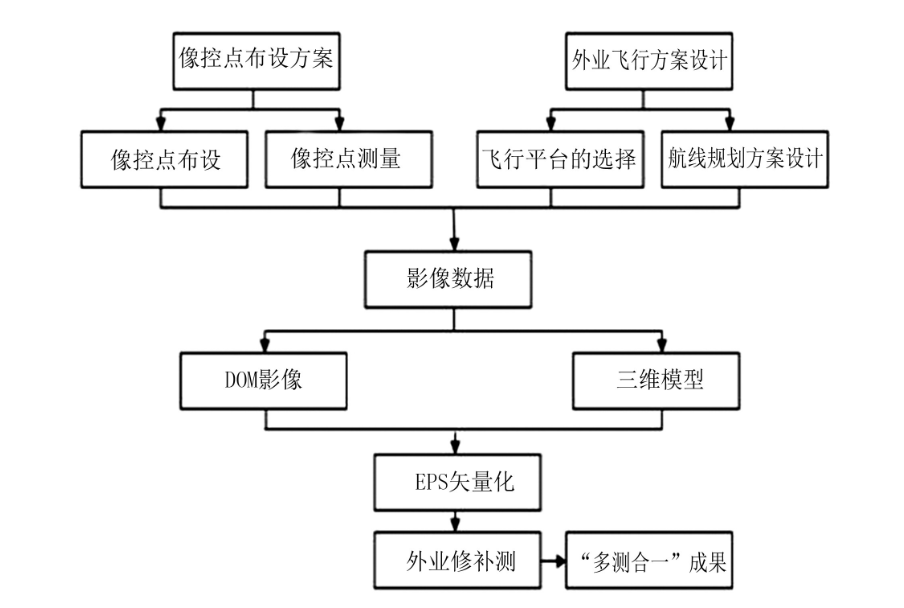
图3 倾斜摄影测量“多测合一”测绘技术路线
4 结论
采用无人机倾斜摄影测量技术,以“多测合一”测量中的竣工验收测量为例。从“多测合一”测绘项目背景出发,对倾斜摄影测量、航摄参数进行分析,着重研究倾斜摄影测量中的多视影像预处理、多视影像联合平差、多视影像匹配3个关键技术。最后通过项目实例,对倾斜摄影测量数据进行精度验证。结果表明,倾斜摄影测量精度满足相关技术标准,可以作为“多测合一”测绘中的辅助作业手段之一。
参考文献
[1]曾远星.无人机倾斜摄影测量技术在建筑立面测量中的应用[J].福建建筑,2020,266(08):160-162.
[2]万丽娟.无人机倾斜摄影三维建模及大比例尺地形图绘制精度研究[D].赣州:江西理工大学,2019.
[3]邓江明.基于倾斜摄影测量的不动产登记技术研究[D].昆明:昆明理工大学,2020.
[4]杨云源,吉健,石洪,等.大疆消费级无人机快速倾斜摄影测量实践[J].北京测绘,2019,33(03):243-248.
[5]陈志华,张俊贤,张克铭,等.云南高速公路无人机倾斜摄影测量实景三维模型建立方法改进及精度提高[J].测绘通报,2019(S1):275-279.
[6]张文春,范洪洋,林楠.基于免像控无人机倾斜摄影测量的实景模型裸眼三维测图研究[J].福建建筑,2019(8).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



