山西焦煤 华晋焦煤有限责任公司沙曲一号煤矿 山西吕梁 033300
摘要:在煤矿开采过程中,煤炭需要通过主运输系统运输到地面。通常情况下,工作面距离井筒比较远,这使得煤矿的主运输系统线路较长,短则几百米,长则数千米。由于皮带输送机的持续运行能力比较强,现在很多煤矿的主运输系统由皮带输送机构成。然而,煤矿井下生产环境恶劣,高粉尘、高温、潮湿使得皮带输送机很容易发生故障,严重影响生产效率。为此,有必要实现对煤矿主运输系统的集中控制,提高系统运行的自动化程度。本文分析了煤矿主运输系统集中控制要实现的功能,重点探讨了系统集中控制改造的实现过程。
关键词:煤矿开采;主运输系统;集中控制
1煤矿主运输系统集中控制要实现的功能分析
煤矿主运输系统集中控制的关键在于实现对整个系统的自动化控制,要实现的功能主要有多设备协同运行、视频监视、远程控制、危险自动报警、故障自动诊断等功能。下面将对这几方面进行说明。
1.1多设备协同运行
通常情况下,主运输系统中有多台设备,例如多台皮带输送机、多台装煤机、洒水设备等。在主运输系统运行时,需要按照顺序开启设备。若多台设备的运行是独立控制,则不仅会浪费大量时间,还容易导致故的后果更为严重。例如,如果多台皮带输送机中的某台发生故障而停止运行,则皮带输送机之间很容易堆积大量的煤炭,清理起来十分困难。所谓的协同运行是指主运输系统中的设备联合运行,实现一键启停。
1.2视频监视
视频信号更加直观,通过其可更加方便地了解主运输系统的实时运行状态。与一些传感器采集来的数据相比,视频信号具有更强的空间特性。通过实时采集的现场信号,不仅可判断出某些故障的程度,还可快速找出发生故障的位置。这为主运输系统的故障维修节省了大量宝贵时间。
1.3远程控制
为了增强主运输系统运行的安全性,同时节省人力,非常有必要实现远程控制。远程控制指的是在地面控制中心就可以对主运输系统的运行状态进行控制。这样不仅有利于实现集中控制和无人值守,还能更好、更快捷地处理主运输系统出现的紧急情况。
1.4危险自动报警
主运输系统运输过程中会出现一些紧急情况,容易威胁到系统的运行。为了避免安全事故的发生,系统应具有危险自动报警功能。一旦发生紧急情况,就立即发出警报,并根据危险情况自动做出相应的调整和应对,从而使主运输系统处于安全运行状态。
1.5故障自动诊断
通常情况下,主运输系统由许多机电设备组成,由于设备的种类和数量众多,设备故障诊断十分重要。为了进一步提升设备诊断效率,系统应具有故障自动诊断功能。在诊断出设备的故障后,能将故障某种特定的信号或代码显示在设备上,便于及时维修,处理故障点。
2煤矿主运输系统集中控制改造的实现
以上分析了煤矿主运输系统集中控制要实现的功能。为了实现这些功能,必须对现有的主运输系统进行改造。总的来说,集中控制改造可分为硬件部分改造和软件部分改造。下面将进行具体介绍。
2.1硬件部分改造
要实现对主运输系统的集中控制,就必须进行系统改造,需安装一些用于集中控制的设备。改造后煤矿主运输系统的集中控制硬件结构如图1所示。
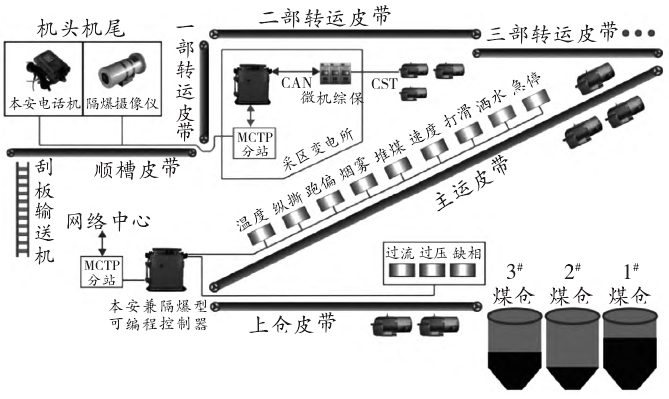
图1煤矿主运输系统集中控制硬件结构图
改造过程中主要加入了本安兼隔爆型可编程控制器、微机综合保护、本安电话机、网络中心和隔爆摄像仪。此外,还安装了大量的传感器,主要有温度、跑偏、烟雾及打滑等传感器。这些传感器都是通过连接可编程控制器实现对皮带的控制。网络中心的作用是实现远程控制和实现对皮带输送机运行状态的监控。通过安装的隔爆摄像仪可查看主运输系统的实时运行状况。在皮带输送机的电机上还安装了过流、过压及缺相保护,这些保护也是通过与可编程控制器连接实现对整个主运输系统的联动控制。值得注意的是,只凭这些硬件难以实现对整个主运输系统的集中控制,还需要采用相应的软件。
2.2软件部分改造
软件的主要作用是对传感器采集来的数据进行处理,从而实现对整个主运输系统的集中控制。总的来说,软件可分为上位机软件和可编程控制器软件[4]。上位机软件主要用来对传感器采集的数据进行逻辑运算,从而发出相应的控制指令。例如,温度传感器采集了大量温度数据,软件要对这些温度数据进行处理,并发出相应的动作指令,可在软件中设定相应的上限,一旦达到了上限则应立即发出报警指令。而可编程制器软件主要用来执行上位机发来的指令。具体来说,上位机软件更适用于数学运算,而可编程控制器软件更适用于逻辑运算。例如,可编程控制器软件在接收到上位机发出的停机指令后,会触发可编程控制器的保护电路装置动作。在运行过程中,上位机与可编程控制器还需要进行数据交换。这些数据交换也是通过软件程序来实现的。为了更方便地了解主运输系统的实时运行状态,还需要采用相应的界面软件。在界面软件上,将主运输系统的一些运行参数显示出来,并采用不同的颜色进行标记。管理人员可通过界面上一些操作按钮,对主运输系统的某个设备进行实时控制。进行编程时,上位机软件通常采用电脑编程软件。电脑编程软件具有很强的通用性,例如VC++,VB等。编程时使用的可编程控制器的类型常见的有西门子、三菱等。
结语
煤矿主运输系统对煤矿生产起着至关重要的作用。为了进一步提升主运输系统运行的效率,需要实现对主运输系统的集中控制改造,改造的主要目的是实现多设备协同运行、视频监视、远程控制、危险自动报警、故障自动诊断等功能。为了实现这些功能,必须对现有的主运输系统进行改造。总的来说,集中控制改造可分为硬件部分改造和软件部分改造。软件的主要作用是处理传感器采集的数据,从而实现对整个主运输系统的集中控制。研究可以为煤矿主运输系统的集中控制改造提供一定的参考。
参考文献
[1]曹正远,丁震,何适.4D光场在井工煤矿无人驾驶运输系统中的应用探讨[J].工矿自动化,2021,47(S2):68-69.
[2]吴作江.煤矿机电运输系统特点及控制管理[J].矿业装备,2021(04):120-121.
[3]贺斌.自动化控制在煤矿井下胶带运输系统中的应用探究[J].矿业装备,2021(04):152-153.
[4]张津鹏,闫海峰,金磊.无线智能系统在宝日希勒露天煤矿道路运输系统中的应用[J].露天采矿技术,2021,36(04):31-33+37.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



