中铁七局集团第一工程有限公司
摘要:针对传统测量方法利用全站仪或RTK技术实施外业断面数据采集,对于复杂地形状况时存在的不足。本文介绍了采用机载激光雷达对地面进行扫描获得地面点云原始数据,再通过点云分类、点云抽稀获取目标区域原始地面高密度、高精度的高程点作为土石方计算的重要原始数据。然后采用南方CASS软件断面法、三角网法等对原始地面点云数据进行断面提取从而计算实测土石方量。打破了传统测量方法在山区复杂地形状况时存在的不足。
1、引言
土石方量的测量是工程施工的一个重要组成部分,是工程预结算的重要资料,土石方测算结果的准确性关系到工程造价及各方的经济利益。土石方量计算的基本思路是利用地面点云数据配合南方CASS软件(路桥专家软件)实现对土石方量的计算。
传统的土石方外业数据测量有三角网法、断面法等,但传统方法往往消耗大量的人力和时间资源,虽然高程点的测量精度有保障但点位的密度往往不高,尤其当遇到现场条件复杂,仪器视线遮挡严重时传统测量方法便受到极大的约束。
而利用正射影像简称(SFM)法对目标区域进行三维重建以实现土石方测量的方法,虽然降低了测绘成本,且操作简单,但在实际应用中,在植被发育好的区域,SFM法光线不能穿透植被,受限较大,且SFM法容易受到天气条件的影响,在风大多云条件下会导致照片发生变化从而影响建模精度,SFM法获得的稀疏点云对外形简单,十分规则的目标才能反映实际情况,而土石方量的计算项目中实际地形往往结构复杂,通过SFM法得来的稀疏点云对测量区域的三维重建精度较低,所以利用SFM法计算土石方量结果精度较低。而机载激光雷达技术在获取地面模型时具有自动化程度高,且受天气影响较小,点位测量精度高、采集空间密度大、速度快等特点,既能避免传统测量方法受现场制约问题又能提高土石方量计算的精度。
机载激光雷达(LiDAR)数据的获取是通过主动传感系统利用返回的脉冲获取探测目标的距离、坡度、粗糙度和反射率等信息,经过地面信息处理可以生成采样点的三维坐标,进行点云分类、数据压缩最后成像。最终比较了传统土方测量方法和激光扫描技术在土方测量中的精度,通过试验得出了激光扫描技术精度高于传统的格网法、断面法等方法的结论,他认为任何一种方法,测量点越密集计算精度越高,这也是点云方法计算精度高于其他方法的主要原因。本文探讨机载激光雷达技术在土石方量测量中的应用,并以阳信项目公路正线土方量核算为例进行说明。
2、技术路线
本文采用D-LiDAR2000轻型机载激光雷达系统,该系统选用质量轻、测距长、精度高的激光传感器,搭配无人机上可以达到5cm(150m航高)测量精度,实现地形测图、土方测量等测绘目的,其主要优势如下:
1、较长测距。在保证低噪点率的同时调节探测距离。高照度环境(如晴天)的测距能力可达320m,低照度环境(如阴天、室内、夜晚等)的测距能力提升到450m,可让飞机在更高的航行高度进行作业,提升作业率。
2、高精度。内置GNSS/IMU惯导系统,可提供高精度的点云成果数据,且组合导航系统不依赖可见光,可实现全天候作业。
3、高密度。激光点频为每秒24万个点,100%的点频利用率,相比于360°扫描设备,点频利用率提升4倍,适用于高密度需求的作业场景。
4、三回波。对于植被覆盖的场景,三次波技术可以使激光相比于双回波有更多次穿透机会,可以进行林业树冠统计和林区地形测量。
通过高精度的机载激光雷达系统可以快速实时采集地表高精度三维数据D-LiDAR2000多平台激光雷达测量系统作业效率表如下表,具体工艺技术流程如下图所示:
航高 | 点密度 | 作业面积 | 一天作业 | 航程 | 备注 |
m | pts/m2 | km2 | km2 | km | 按照30%旁向重叠,速度13.5m/s,一天6架次 |
70 | 259 | 2.32 | 13.93 | 40 | |
100 | 181 | 3.21 | 19.27 | ||
150 | 121 | 4.61 | 27.64 | ||
200 | 91 | 5.92 | 35.49 |
表 D-LiDAR2000作业效率表
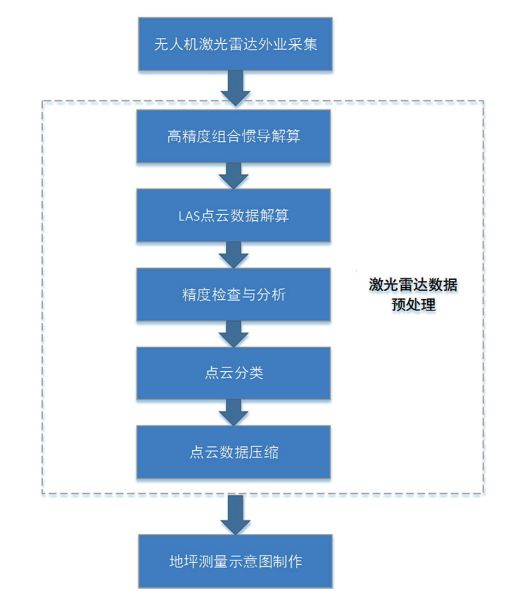
技术流程图
3、数据采集
本文引用阳信高速公路建设项目为例。测区位于广东省信宜市高坡村,总长度7.8公里,由于项目现场条件复杂测量区域内植被茂密且乔木、灌木、农作物丰富视线遮挡严重传统的测量方法已不适用于复杂的现场条件现场情况如图所示。




现场地形情况图
作业前对测区进行了踏勘了解测区内现场地形及空域情况根据任务区域的范围、雷达扫描参数等要求设计最佳任务航线航飞相关参数如下表所示,飞行路线如下图所示。
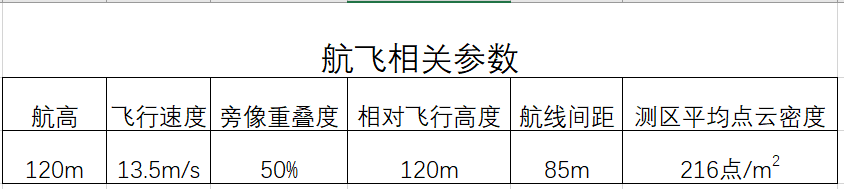
航飞相关参数
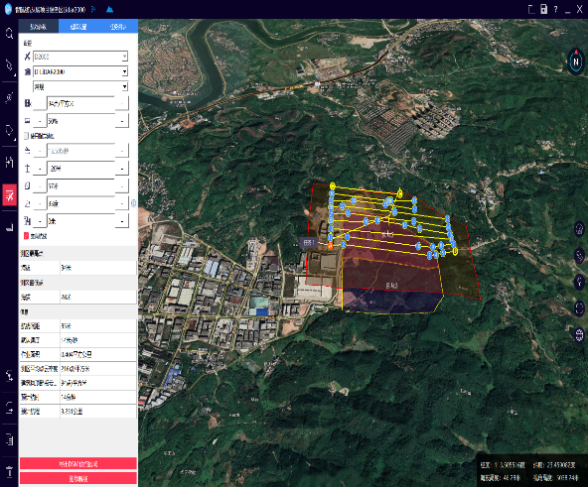
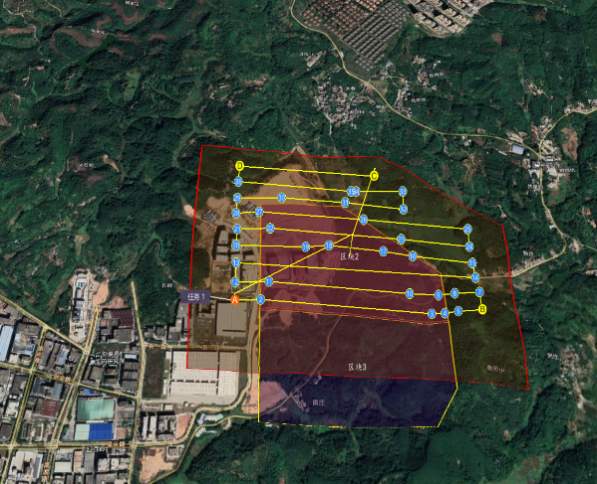
飞行路线图
4、数据处理
4.1航线数据解算
通过无人机激光雷达平台D-LiDAR2000获取的激光雷达高精度的组合导航(POS)数据信息,本文采用InertialExplorer(惯导探测器)数据后处理的方式对 POS数据进行解算获取具有高精度坐标信息的OUT文件,从而获得航线解算数据。
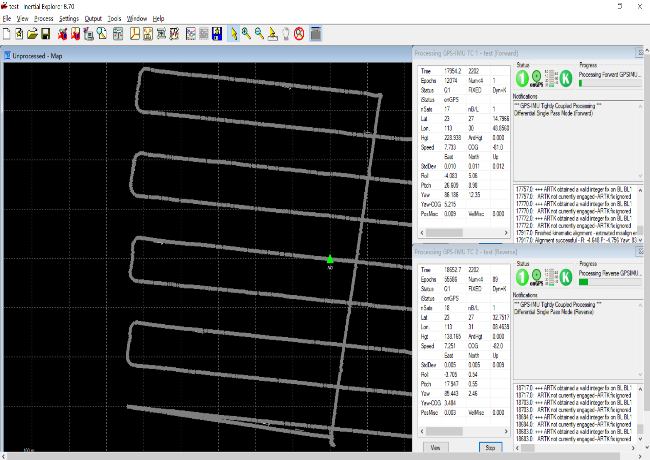
IE软件进行航线数据解算生成OUT文件
4.2点云数据解算
点云数据解算是对D-LiDAR2000激光雷达获取的所有地面点进行整体编辑处理,其中包含了特征点提取、质量检查、航带平差、坐标转换、精度检查、点云标准格式(LAS)导出。通过一系列的处理后获取设计独立坐标下的点云数据。
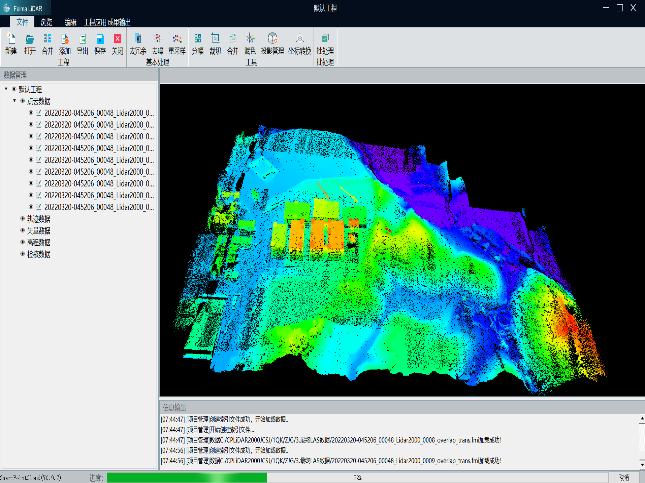
①、通过特征点提取后进行点云解算过程如下图。
特征点提取过程
②、点云解算完成后进行质量检查看数据解算情况是否合格,区域内整体颜色浅色代表精度高,深色部分精度偏低,在后面平差中需要多做平差。
质量检查报告
③、根据合格的点云进行航带平差,在平差过程中通过提取特征点,删除较大的特征点从而消除相邻点云数据在重叠区域的误差。
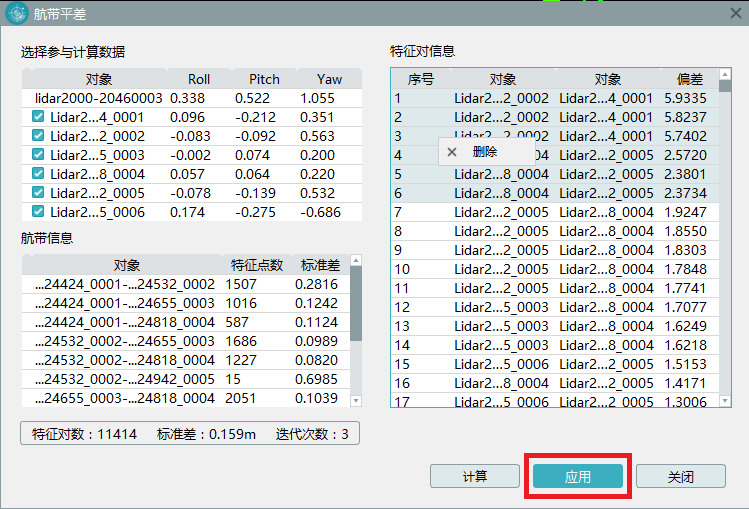
删除较大的特征点 删除后重新计算的特征点标准差0.067m

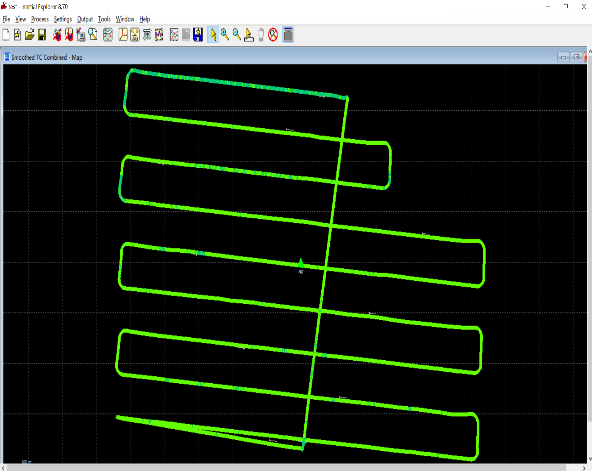
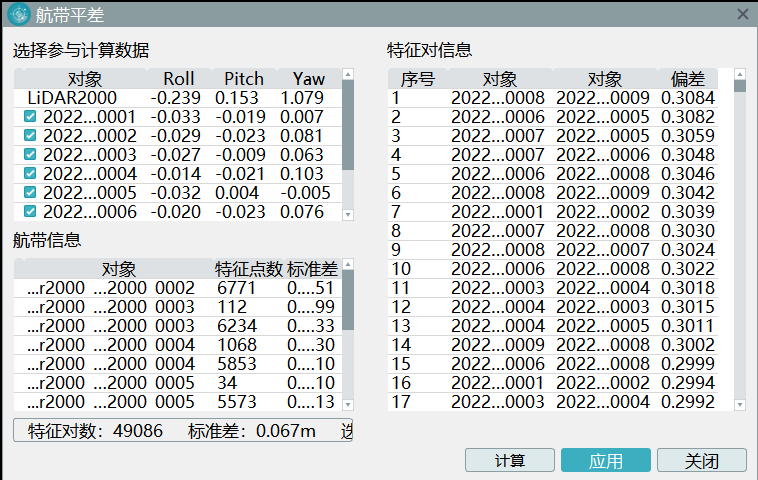
使用新的平差结果进行航带平差 平差后数据
④、对于最终平差出来的点云进行坐标转换,把所有WGS84标准点云转换为我们现场施工需要的独立坐标系。在转换过程中需要我们有清晰的思路,对于航测雷达采用的千寻RTK数据收集是标准整数带坐标,转为施工独立坐标时候需要根据设计提供的中央子午线、高程投影、长半径、扁平率及坐标系统对于转换。转换后的坐标用于后期算土方量中线录入做铺垫,因此必须坐标转换准确。
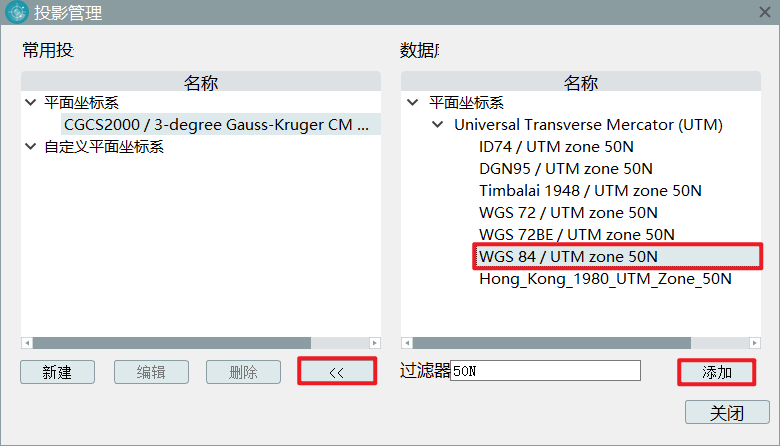
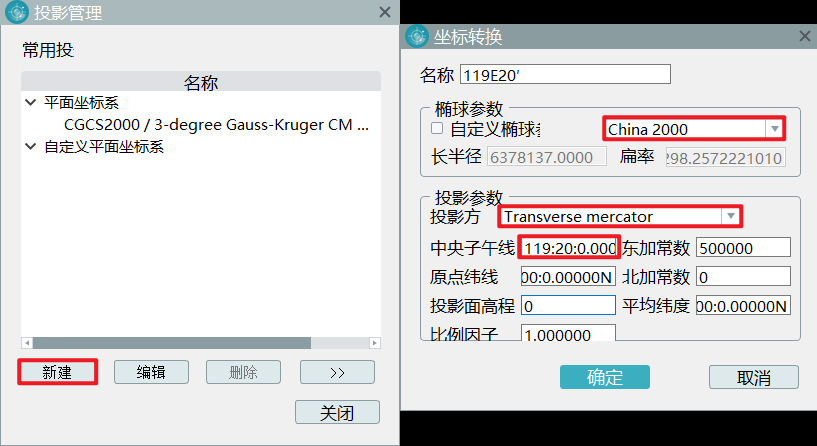
标准坐标系统录入 独立坐标录入
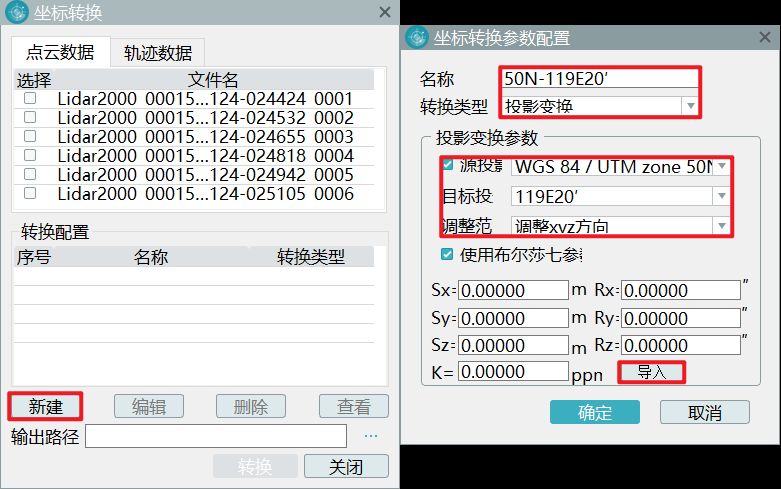
导入七参进行坐标转换
⑤、对转换的坐标进行精度检查,根据现场采集部分点导入转换后的坐标点云看坐标转换的是否有问题。没有问题话可以导出最终的LAS文件,做为下一步点云分类提取地面点。
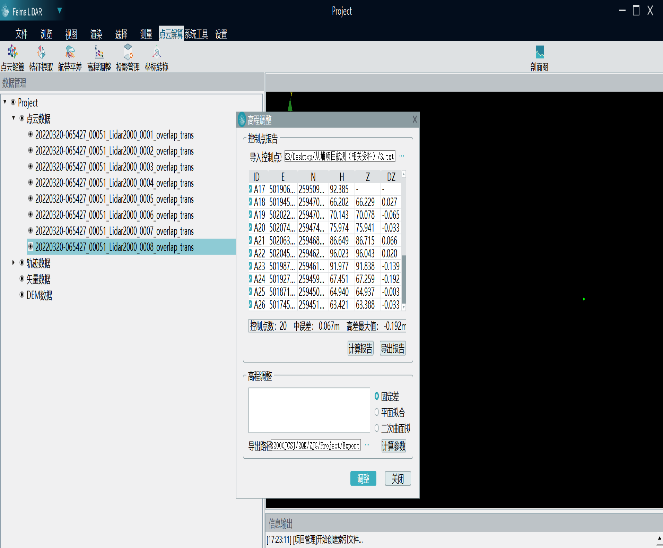
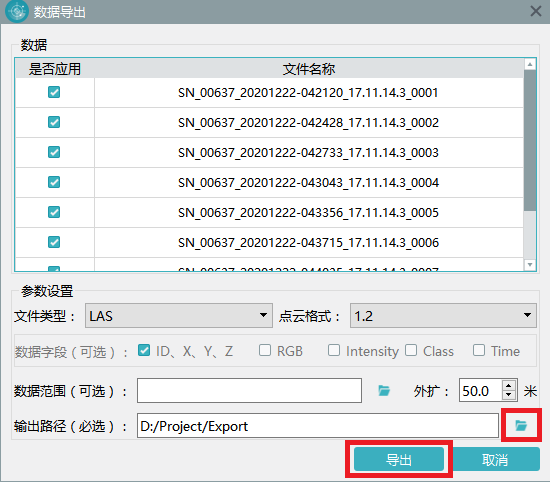
导入采集点高程精度在1-6公分 精度达到后进行最终LAS文件导出
对于点云数据解算最终目的使所有点云通过航带平差确保点精度达到1-5公分级别,同时坐标转换成我们施工用的独立坐标,便于下来采用南方CASS(路桥专家)软件进行线路中线导入计算土方量。此时点云是未经过分类点云,下来我们需要对点云分类提取我们所要用的原地面点,剔除植物及房屋上面的点。
4.3点云数据分类
解算后的点云数据包括了非地面点和地面点,针对土石方量计算需要分离出地面点数据。由于点云数据量较大,分类前可以根据图幅比列1:2000、1:1000、1:500图幅将点云分割为大小相当的数据块方便后续处理。数据分块后将进行点云数据提取,提取采用自动分类和人工分类相结合的方法分类出地面点和非地面点。
(1)自动分类:利用数据处理软件飞马智理图进行自动分类具体步骤如图所示:

点云数据自动分类步骤
(2)人机交互分类:人机交互分类方法是通过人工判断的方式对自动分类的结果进行修正或是在自动分类开始前先对特定地物类别进行分类。如构建三角网后对区域内的整体进行分类,剔除“坑点”或“突出点”细部可再根据拉剖面修正。由于规模和形态变化较为复杂,本项目中采用人机交互分类为主,在有条件的区域借助DOM进行辅助分类以提高准确率。
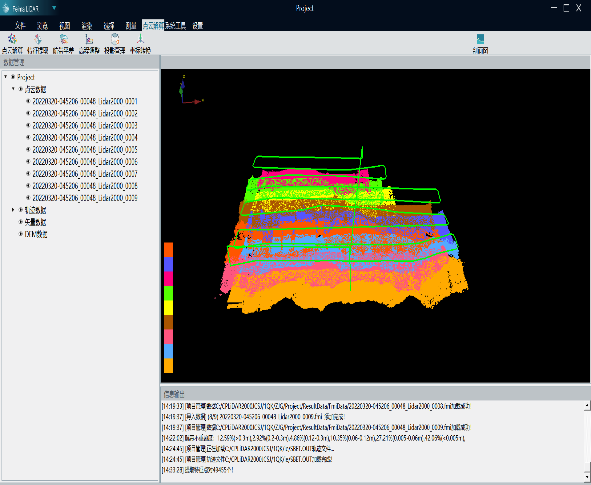
①、对数据进行分幅处理,一般数据根据航线条数自动分幅,每幅点云数据量太大处理时候速度慢,因此要对原数据进行1:2000、1:1000、1:500分幅。以下为对数据进行1:500分幅。
对整体数据进行1:500分幅 对前五幅数据进行处理
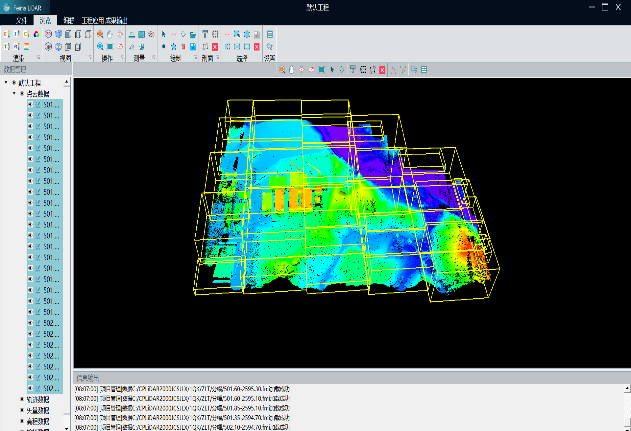
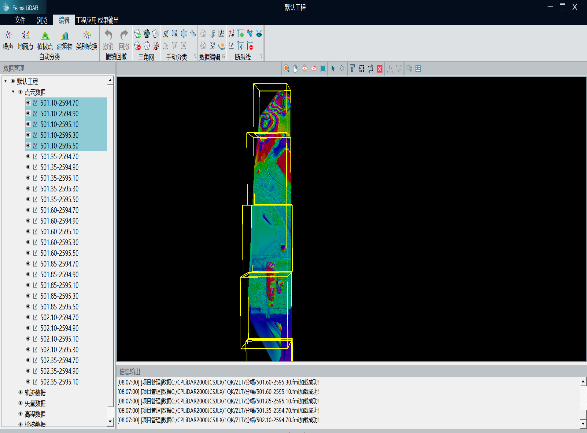
②、分幅完成后进行构建三角网对数据进行检查,人工判别剔除“坑点”或“突出点”细部可再根据拉剖面修正。目的剔除之前自动分类留存下来没有处理干净的房屋顶、植被树干顶的残余点云。
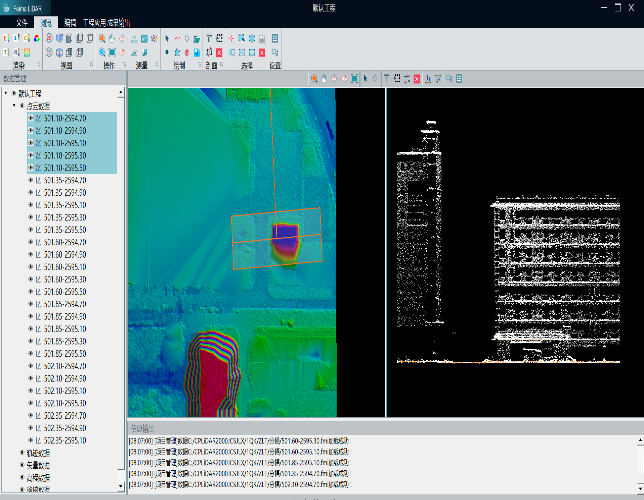
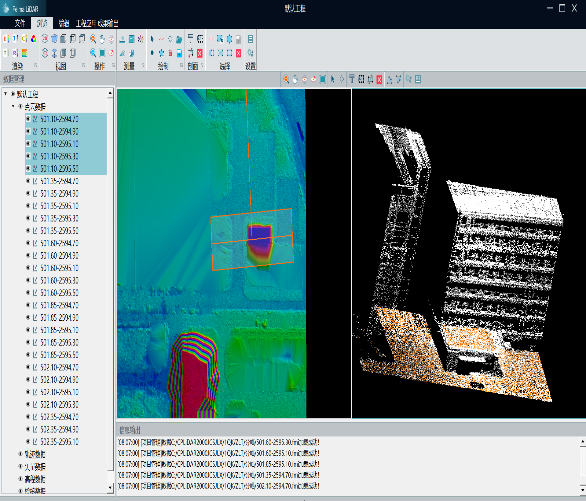
对凸点进行拉剖面处理 剔除没清理干净的房檐点云
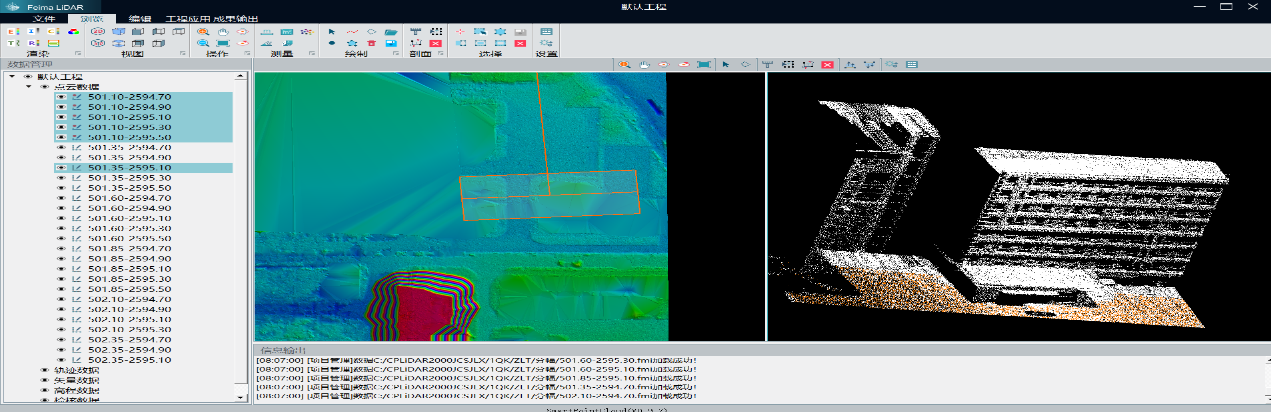
剔除后凸点消失剩余原地面点云
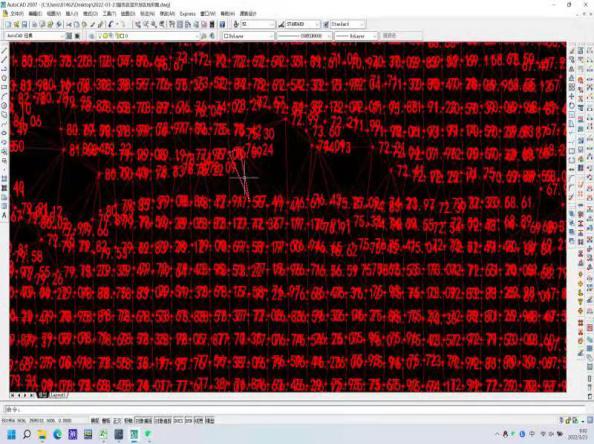
③、对各幅内所有点云数据进行人工细部分类完成后,确保剩余点云都在地面可以保存数据进行成果输出。成果输出可以生成高程点TXT格式,根据需要设置每个点间距50公分至几米不等,点间距越密数据越多计算土方量越准确。数据为坐标格式(X、Y、Z),对于高程点导入南方CASS或路桥专家等软件可进行土方量计算。也可以生成等高线成果,形成地形图便于图纸设计。
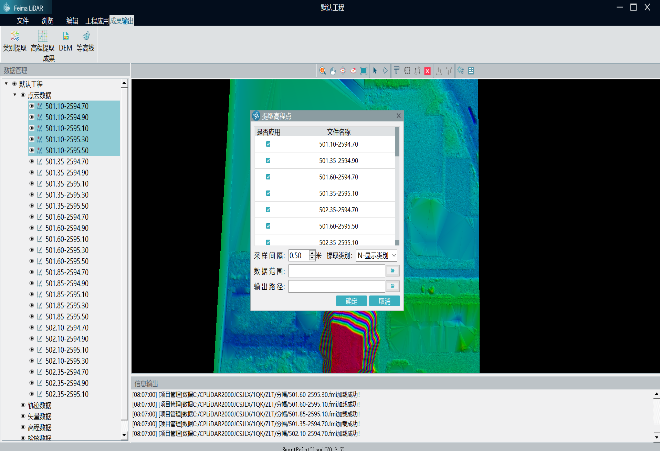
进行高程点成果输出 24万个地面点坐标
④、对数据整体进行等高线成果输出。导出等高线基础数据后可在后期利用南方CASS或路桥专家软件对现场进行便道设计规划。
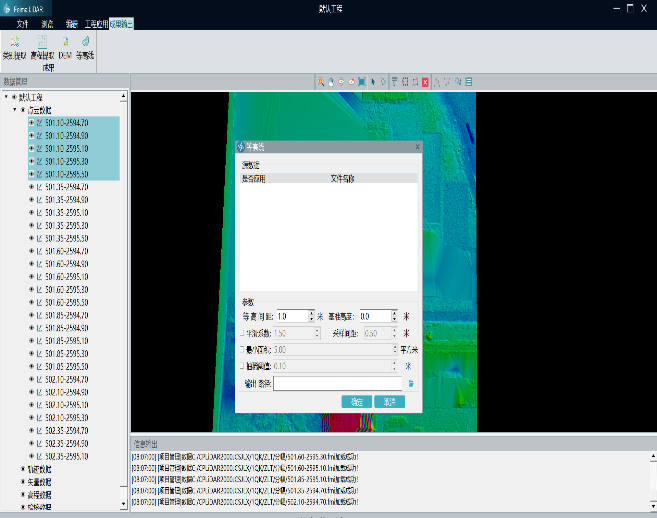
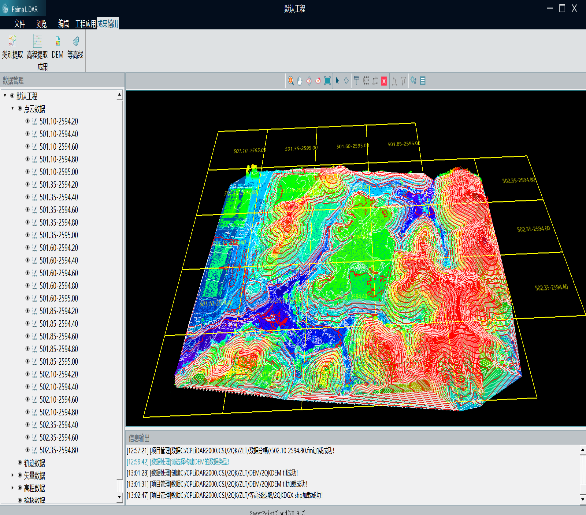
进行等高线成果输出 生成的等高线图
4.4土方量计算及其施工便道规划
①、对之前导出的TXT格式高程点成果导入到南方CAS里面生成三角网,对三角网进行整体土方量计算,从而得到需要的土方量。
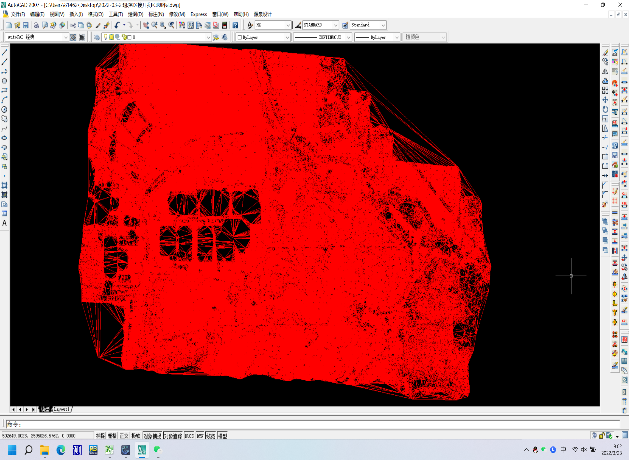
导入后的三角网图 生成的每个三角网
②、对之前导出的等高线成果导入到南方CASS里面,生成等高线图,可在等高线图中对现场进行施工便道进行规划,设计临时建设设施等。
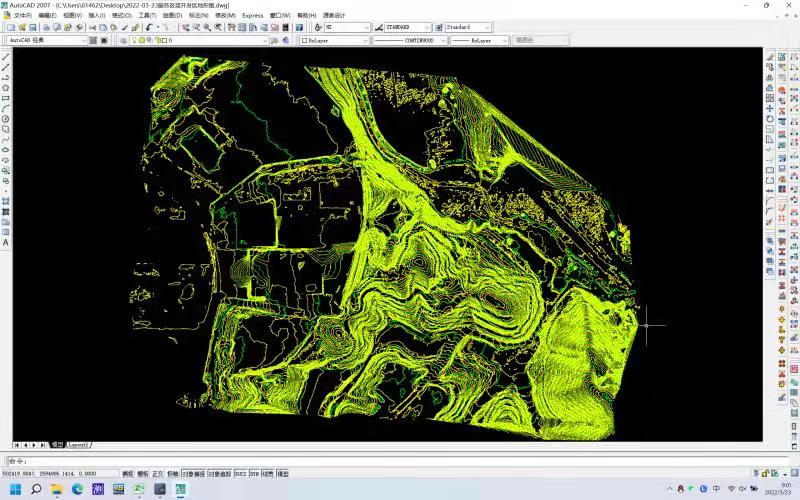
生成等高线图
5、精度分析与评价
对于土方测量项目而言,本文提出两种精度评价方法。一是内符合性评价,包括原始点云数据精度、点云分类精度。
①、原始点云数据精度评价
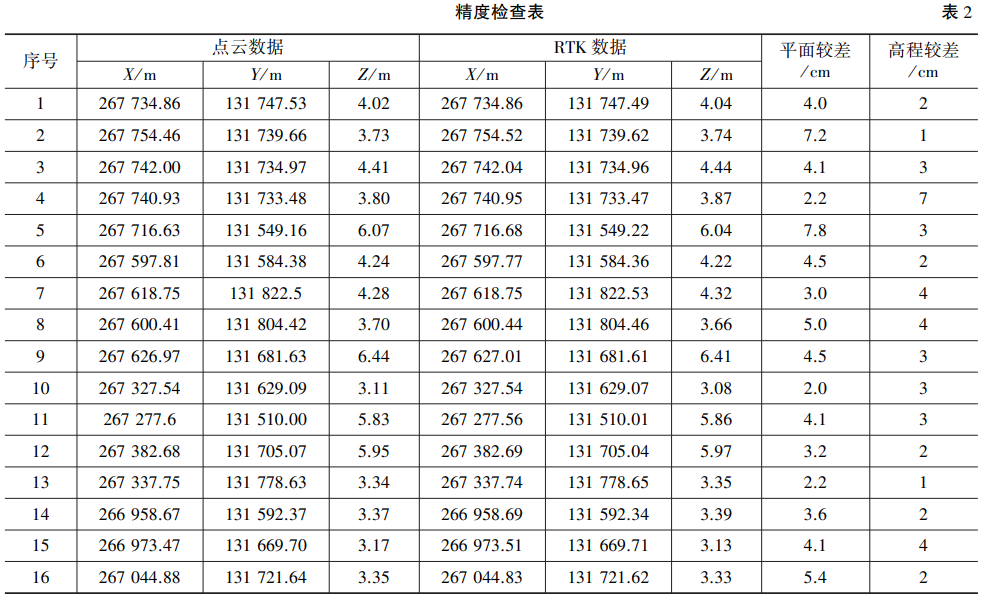
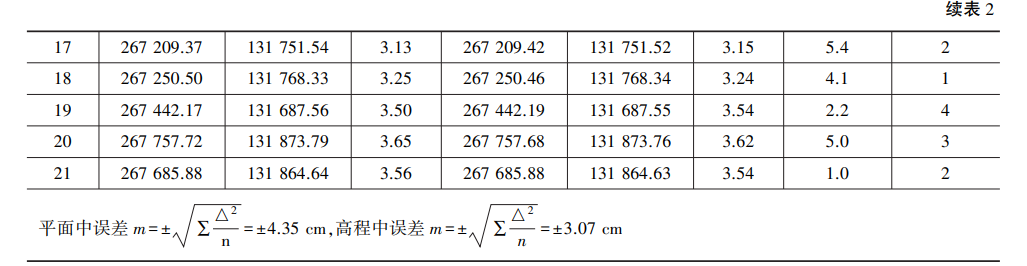
采用网络RTK方法采集测区范围内均匀分布的21个检查点的三维坐标数据,将RTK数据作为真值,对点云数据进行精度评价,平面中误差为4.35cm,高程中误差为3.07cm,如表下表所示,根据表格中统计结果,本次激光点云的数据精度是完全满足土石方测量的精度要求的。
②、点云分类精度评价
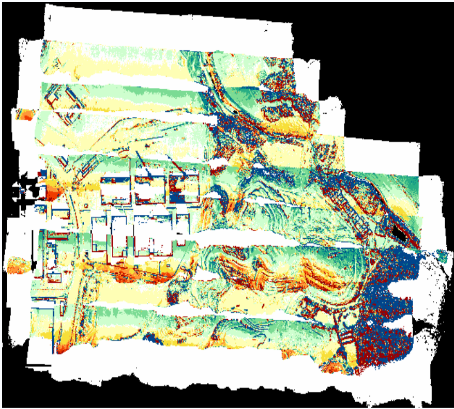
本项目在采集点云数据的同时完成了影像数据的采集,在点云分类工作完成后,套合正射影像数据进行点云分类精度评价,本项目点云分类效果普遍比较理想,在个别复杂地形如陡坡时可靠性略有下降。
6、结 语
随着机载激光雷达惯性导航系统的发展,机载激光雷达的可靠性越来越高,相比于传统的土石方测量方式,其作业速度快、精度高、劳动强度低、不受现场复杂地形影响等优点。在保证精度的同时极大减少了工作量,降低了作业难度,提高了作业效率。
从本文的项目实际应用中可以看出,机载激光雷达技术在复杂区域土石方测量中有着巨大的应用前景,能够准确反映工程施工中的实际土方数据,为工程结算提供可靠的数据支撑。
参考文献
[1] 深圳飞马机器人公司D-LiDAR2000轻型机载激光雷达系统使用说明书。
[2] 魏占玉,Arrowsmith Ramon,何宏林等。基于SFM方法的高密度点云数据生成及精度分析[ J],地震地质,2015,37(2):636-648。
[3] 鲁晨曦,基于图像的全局SFM三维模型重建方法研究与实现[D]。成都:电子科技大学,2017。
[4] 刘经南,张小红。激光扫描测高技术的发展与现状[J]。武汉大学学报信息科学版,2003,28(2):132-137。
[5] 范亮.地面激光雷达技术在土方变化量监测中的应用[J].测绘与空间地理信息,2013,36(11):249-251,256。
[6] 蔡悦. 机载激光LiDAR在密林山区测绘中的应用研究[J]。测绘与空间地理信息,2020,43(3):157-159,164。
[7] 孟志义.激光扫描技术在土方量计算中的应用及精度分析[J]。北京测绘,2012(4):64-66+102。
[8] 黎建平.关于LiDAR数据DEM成果精度影响因素的探讨[J]。测绘与空间地理信息,2018,41(9):231-233+238。
[9] 严慧敏.数据正射影像结合LiDAR数据再在山区测绘中的应用[J]. 测绘通报,2020(1):115-119。
[10]张磊,王晏民,王国利。基于地面激光雷达技术计算复杂区域土方量[J].测绘通报,2014(S):155-158。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



