西安爱生技术集团有限公司 陕西西安 710000
摘要:无人机视觉识别技术是将无人机作为载体,结合机器视觉技术,利用无人机在飞行过程中拍摄的图像,并且从图像中提取信息进行处理,最终用于无人机自主控制的输入和无人机终端应用领域的拓展。本文对无人机的目标识别和追踪系统设计进行分析。
关键词:无人机;目标识别;追踪系统设计
1硬件系统设计
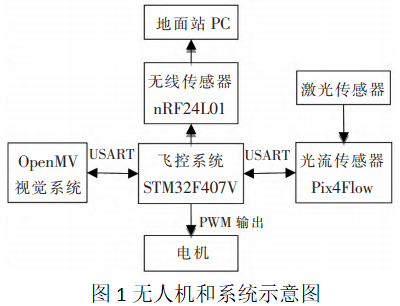
本文使用自制的无人机进行试验,飞控系统核心为STM32F407V,包括5个额外的USART端口。同时配置有惯性传感器(MPU6050),光流传感器(Pix4Flow)、激光传感器、OpenMV视觉系统和无线传感器(nRF24L01)等多个传感器进行数据采集和增强无人机飞行的稳定性。其中,惯性传感器模块主要记录无人机姿态信息,集成于飞控系统中;光流模块主要作为水平面位置和速度反馈器;激光传感器主要用于无人机测高、定高,与光流模块配合使用;OpenMV视觉系统主要对目标物体进行动态追踪识别;无线传感器nRF24L01模块返回实时数据给地面站PC。无人机和系统示意图如图1所示。
2无人机的目标识别和追踪系统设计
本文以无人机追踪智能小车为例,实现无人机对智能小车进行识别和追踪的功能,主要包括两个功能:无人机一键起飞,并使其稳定飞行且定高悬停、平缓降落等;追踪地面的智能小车实现偏航的跟随偏转。
2.1目标识别
在智能小车车身粘贴的黑线标志物进行目标识别,利用OpenMV视觉模块的RGB彩色图像获得灰度图和二值图,并对二值图进行横向和纵向扫描,检测图像的边缘,将每一行或每一列的黑线中心坐标转换至霍夫空间,转换时以上一帧检测出的直线作为检测范围的约束条件,既能减少运算量又能实现对直线的跟踪。选择参数空间中的极大值点对应的直线作为候选直线,若行扫描和列扫描获得的两条直线近似满足垂直关系则认为检测有效,并对有效检测后的两条直线的交点和斜率进行低通滤波。检测黑色直线时,通过霍夫线变换识别画面内的直线,再设置黑色直线的颜色阀值,过滤其他颜色直线的干扰。
2.2目标追踪
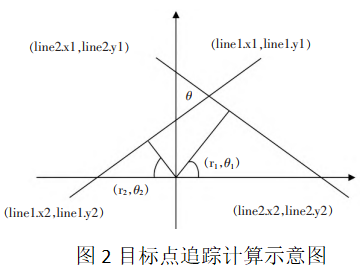
利用OpenMV拍摄的相邻两帧图像获得两条黑色直线标志物的坐标信息,通过调用calculate_intersection(line1,line2)函数计算得出两条黑线交点的坐标值(x,y),调用calculate_angle(line1,line2)函数得出两直线相交的角度值,判断出目标物体的运动轨迹。在调用calculate_intersection(line1,line2)函数前,采集两条直线的坐标信息,两条直线的端点分别为(line1.x1,line1.y1)、(line1.x2,line1.y2)和(line2.x1,line2.y1)、(line2.x2,line2.y2),坐标值及角度的计算示意图如图2所示,求解见式(1)~式(12)。最后OpenMV通过串口通讯把对应的数据发送到飞控端,飞控端接收到数据后进行格式解析,得出对应的数据后进行无人机的姿态调整。
3试验结果与分析
3.1定高及悬停
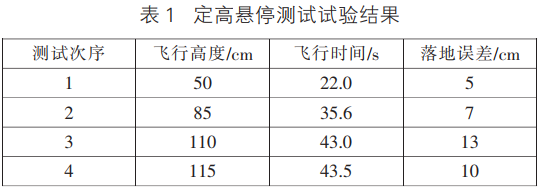
由于相邻的两幅图像总会存在相同的特征,通过对比这些特征点的位置变化信息可以判断出物体表面特征的平均运动,这个分析结果最终被转换为二维的坐标偏移量,通过处理帧与帧之间所采集图像的特征点的x和y位移的增量值近似为零,这样就能使飞机定点悬停。根据光流传感器的两种光流数据,一种为原始光流数据,另一种为融合后的光流数据。基于波形图可以看出通过融合解耦后的光流数据波形更加平稳,更有可能使飞行器取得良好的悬停效果。利用上位机进行设置飞行高度值,进行一键起飞,待飞行器在指定高度飞行一定时间再一键降落,观察飞行器降落后中心位置与起飞前的中心位置之间的误差值。若落地误差值较大,且相对不稳定,则通过调整光流算法的参数来降低落地误差。定高悬停测试试验结果见表1。由表1定高悬停测试结果可知,无人机在不同的飞行高度和飞行时间下,能够实现定高悬停稳定飞行,落地误差基本维持在5~13cm以内,基本满足设计要求,未来可通过调整算法,继续降低落地误差。
3.2目标识别与追踪
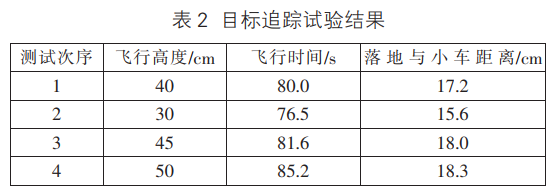
完成室内定高悬停试验以及对光流数据波形的分析后,利用OpenMV视觉模块进行目标识别与追踪试验,通过边缘处理的图像后进行霍夫圆变换。在室内布置一台遥控小车,小车外壳贴上黑线进行标记,该标记物为OpenMV利用霍夫线变换算法进行处理的特征点。利用上位机一键起飞无人机,飞至小车上空,遥控控制小车运动,无人机在空中实现跟随小车的试验,目标追踪试验结果见表2。由表2目标追踪试验结果可知,在不同的飞行高度和飞行时间下,追踪运动小车,落地误差基本保持在18cm以内,表明本文所提供的算法能够实现运动目标的识别与追踪。
4结语
本文基于开源四轴飞控和OpenMV,设计了一款具有目标识别和追踪功能的飞行系统,该系统能够通过上位机完成起飞、定高悬停状态,并稳定地对指定目标进行识别和追踪。试验结果表明,光流传感器输出的光流数据通过惯导融合和解耦后更加利于飞行器的定点悬停,能够在一键起飞后迅速进入悬停状态;同时,在悬停状态下,能够稳定地对指定目标进行识别和跟踪。
参考文献:
[1]基于ROS的无人机目标检测及视觉定位系统[D].张钰.山东大学2020
[2]基于图像识别的无人机导航系统设计[J].李高杰.农机化研究.2021(01)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



