湖南省湘煤地质工程勘察有限公司,湖南长沙 410000
摘要:进入信息时代和数字时代以来,矿山地形图测绘系统借助现代化技术成果的更新换代,获得了新的发展。云计算作为新型数据处理技术,为有效应对地理信息数量急剧增加、分析工作日益繁重的挑战提供了新途径。矿山地形图测绘领域的专业人员要紧跟技术发展趋势,大力探索无人机航测等新型技术的有效应用。基于此,文章分析了无人机摄影测量技术,针对矿山无人机摄影测量技术的应用需要,探讨了无人机航测技术的基本原理及影响因素,充分发挥无人机航测技术优势。此次研究对无人机航测在矿山地形图测绘中的应用有较好的借鉴价值。
关键词:无人机航测;矿山;地形图测绘;应用
1 无人机摄影测量技术简介
1.1 无人机简介
无人机是一种由无线电远程操控的飞行器。在20世纪20年代,无人机首次出现在军事应用中,以取代执行危险任务的飞行员。过去,由于成本高、传感器大、耐力差、飞行控制系统复杂等缺点,民用无人机的使用发展缓慢,一些低质量的产品在21世纪初出现用于科学研究。随着新技术的发展,大疆等无人机制造商的出现,迅速扩大了低成本的无人机市场。统计数据显示,目前生产的无人机数量已逐年增加,在世界和市场发展迅速。2014-2021年,民用类无人机经历了爆炸式发展,预计到2030年,全球无人机市场将达到1500亿美元以上。随着各种技术的发展,无人机的应用场景逐渐从军用过渡到了民用。许多无人机通过加装各种配置,满足了对科学研究和其他使用领域的需求。当前,无人机有很多不同的类型,如固定翼无人机、多旋翼无人机和无人飞艇,其中固定翼和多旋翼无人机在目前的科学研究中仍是主流。
1.2 无人机摄影测量影像采集流程
无人机摄影测量流程如图1所示,包括飞行前资料采集、航线规划、飞行控制系统检查、数据采集、数据检查、数据处理、补飞等。航线规划是无人机(UAV)可靠、安全飞行的关键。现有的路线规划方法主要基于仿真场景,其主要目标是规划最优路径,以便它消耗最小的能量,费更少的时间,并减少无人机之间碰撞的影响。另一方面,在路径规划技术中,无人机的最优路径规划需遵循路径最优、完整覆盖、避免碰撞三大原则,其中路径最优是指系统应该具有时间效率、成本效益和效率上的最优路径,完整覆盖是指无人机的路径应该能够完全覆盖住需要勘测的区域,没有任何遗漏,避免碰撞是指无人机有能力检测碰撞,从而不对无人机造成物理伤害。
2 无人机航测技术的基本原理及影响因素
在3S技术发展推动下,实现了高分辨航空影像数据生产目标,在图像处理技术、定位技术等技术支持下,为无人机航测技术发展提供了技术保障。无人机航测技术主要以无人机为平台,结合了实时动态定位技术、航空影像摄像技术等,在高空作业中,可实时采集数据信息,更加精准地生成影像数据,整个数据采集和生成过程中,以高分辨率的真彩色数字影像为基础,在数据处理技术和软件应用支持下,有效进行影像校正、空三加密处理。研究发现,航高与地面分辨率是正比关系,此种系统误差消除难度大,可以考虑借助摄影测图系统进行误差修正。有研究人员通过实验分析得出,航高每升高100m,地面分辨率会增加2.5cm左右,进而推算出,当航高为1000m时,地面分辨率为0.25m。同时,有研究证实,地形的起伏状态会引起投影误差,误差的产生与像点位移有关,地形起伏时,像点与垂直投影点会出现不同程度的直线位移情况,当中心摄影在垂直摄影状态时,投影误差与地形高差成正比,与航高成反比。针对此种情况,可以增加一定的航高,解决地形起伏引起的投影误差问题[1]。
3 无人机航测技术优势
无人机航测技术提供了航测外业和航测内业功能,在外业部分,支持像控点布设和测量、支持对航测区域的踏勘、满足低空航摄及属性调查要求;内业包括对控制点数据的整理、数据初始化处理及正射影像处理、等高线生成等。在矿山地形图测绘中无人机航测技术,优越性显著,测绘工作效率明显提升、应用灵活;无人机本身体积小、操作便捷、携带方便,且在实际测绘场景应用中不受外部环境影响,有效规避气候因素影响,满足全天候信息采集需要。另外,无人机航测技术测量精度高,能够为矿山治理提供可靠的数据支撑;在数据收集、踏勘等方面减少人工劳动强度,可在短时间内完成大面积测绘任务;并且无人机航测技术在实际应用中安全程度高、无需人员驾驶、支持远程控制,优势性能明显。
3.1 具有较高影像数据分辨率
无人驾驶飞行器的空中测量技术是结合无人机技术、GPS定位系统技术、照相技术的新型测量技术,立足于低空飞行,利用高分辨率照相技术进行。以目前无人机飞行测试技术水平而言,在无人驾驶航空器飞行测试过程中所获取的影像数据清晰度可达到米级。和传统的地面测量技术相比较,无人驾驶飞行器航测技术有更广泛的应用,可以到达传统地面测量技术无法达到的地方,且所获取的数值更精确,减少了因地面测量人员操纵飞机而产生的偏差。因此,无人驾驶的空中探测技术被广泛运用在矿井地质检测、大面积地质测量等方面。
3.2 具有较高数据获取效率
传统的测量技术所需的人员、物质资源非常庞大,且所获取的测量数据期限过长,大大降低了测试效益。无人机航测信息技术是以现代化的遥测遥控技术、GPS定位系统信息技术、低空飞行信息技术以及数据通信技术为基础研发出来的新型信息技术,不需要复杂的人工操纵,具有灵活方便、数据精确、应用范围广的优势,大大提高了单位时间内的数据采集效率,有效降低了测试成本,实现了更高的经济效益,并有广阔的应用前景。
3.3 具有较强社会经济效益
无人机航空测量技术的应用成本相对较低,且由于该技术融入了先进的互联网科技、通信科技、计算机等,所以,相关人员在无人机航空测量技术的使用过程中更加方便快捷,不仅达到有效收集航空数据的目的,而且大大提升民用无人机航空测量技术的社会经济效益。另外,无人机飞行航测技术在低空飞行过程中,能够获得大区域内的航拍摄像数据,大大减少测量周期,节约了测绘时间,且测量结果更为精确,为现代测量技术的迅速发展奠定基础。
4 无人机航测技术在矿山地形图测绘中的具体应用
4.1 确定矿山地形图测绘数字结构
在无人机航测技术支持下,清晰地将矿山地形图测绘数字结构呈现出来,实现对地形图测绘成本的把控、降低了测绘工作风险、满足矿山地形图测绘工作需求,为矿山综合治理提供数据支持,更加科学地开展矿山治理工作。
4.2 确定基本航线,满足航测精准度要求
在矿产地形图测绘中使用无人机航测技术,提高了测绘工作效率,改变了传统测绘工作模式,提高了地形图测绘工作效率,精准确定了基本航向,选择适合的海拔范围,以保证勘测数据的准确性。同时,在无人机航测技术支持下,为提高航测精准度提供了技术支撑,无人机航测成像清晰度高,为矿山地形图测绘提供了新型测绘技术手段,并实现了在恶劣天气下正常作业的目标。
4.3 航线数据获取
4.3.1 项目概况
选取我国西部地区的一处亟需综合治理的废弃矿山,前期勘察发现,需测绘面积为4.5km2,比例尺为1:2000;整体的地形地貌高低不一,植被破坏严重,地形图测绘难度大,通过使用无人机航测技术,实现了矿山地形图测绘工作目标。
4.3.2 测绘中无人机航测具体作业流程
基于无人机的航空摄影测量技术流程如图1所示,主要包含数据获取和内业处理两个环节。数据获取包括资料收集及分析、航线规划、航空摄影作业、获取无人机航拍原始影像和POS 数据及对数据进行质量检查。内业处理包括利用大疆智图软件进行空中三角测量、后得到研究区域的三维模型、DOM,DEM,DLG 等数字产品。最后通过质量检查后提交成果。
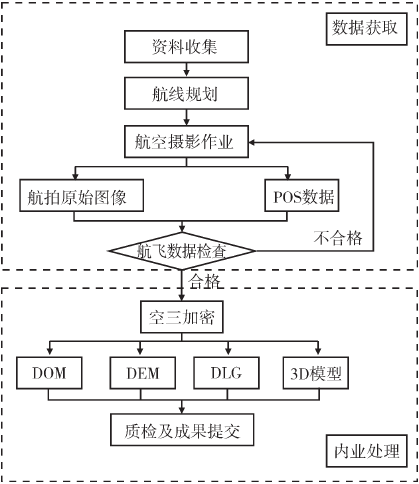
图1 无人机航空摄影测量流程
测绘前,做好充分的准备,结合实际情况,明确无人机飞行任务和目标,根据废弃矿山区域的摄影面积、地形地貌、气候和生态环境破坏程度进行航空摄影,将实际需要测绘的区域分割为两个子区块,设计航飞高度为350m,航向重叠度为75%。在像控点布设上,根据地面控制点的引导,精准获取航空影像数据,在布设像控点过程中重点参照地形变化实况。在本次地形图测绘项目中,将像控点布设密度设定为3个/km2,确保像控点的布设满足测绘区域航测需要,实现航测范围全覆盖,在矿体分布区域加密像控点的布设。完成像控点布设任务后,使用空中三角加密测量技术,规避影像“留白”现象。无人机航测技术应用在本项目测绘中,存在被高大建筑物和植被遮挡的情况,造成部分区域内无法提取到地物信息,通过使用空中三角加密处理技术,有效解决了上述问题,更好地提升了航测精度。经过空中三角加密处理后的数据,需要再次进行校对和镶嵌处理,本项目采用的是大疆M600PRO搭载大势智慧双鱼4B云台进行数据采集和收集,满足数据检查需求,可及时发现数据,确保地形图相关测量参数和数据准确无误。完成上述操作后,进行手动操作,精确标记水系、民用建筑标高等。对航测测量结果分析发现,将无人机航测技术应用在矿山地形图测绘中,发挥了无人机航测技术的优势,平面航测误差小、高程误差小,各条航带影像数据清晰度高,重叠度、航向等技术指标满足设计要求,无漏洞现象,影片涵盖了测绘区整个区域,为立体模型的搭建和连接,提供了便利条件。同时,在无人机航测过程中,加强对控制网的建设,进一步提高了无人机航测精度,在地形复杂区域适当增加控制点,保证了测量精度,证实了无人机航测技术应用的可行性和实用性,在本矿山项目地形图测绘中展现了良好的应用效果。
4.4 飞行参数比对
根据本研究实际情况,对研究区域布设航线,不同航高飞行参数如表1所示。
表1 不同航高飞行参数
航高 /m | 焦距 /mm | 分辨 率/cm | 飞行面 积/km2 | 飞行时间/m | 像素 行 | 像素 列 | 航向重叠度/% | 旁向重叠度/% |
150 250 350 450 | 35 35 35 35 | 1.88 3.14 4.40 5.65 | 1.2 1.2 1.2 1.2 | 54.67 36.75 29.62 23.47 | 8192 8192 8192 8192 | 5460 5460 5460 5460 | 76 76 76 76 | 72 72 72 72 |
4.5 检查点布设及测量
为了精度评定及分析需要,在研究区域内布设85个点,检查点除矿山区域范围外均匀分布在整个测区。检查点测量按照 RTK 图根点地形测量要求,检查点标志和做普通像控点标志一致,在地面利用羊毛刷和白色油漆涂刷以利于内业判读,一般做L型或十字型,能达到在无人机拍摄影像上清晰判读的要求。仪器经过控制点校正,经检查,平面和高程误差均在5 mm 以内,校正完后对每个检查点用对中支架固定仪器,在RTK固定解模式下逐个进行测量后得到检查点坐标。本次研究采用CGCS2000坐标系,1985国家高程基准。
4.6 航空摄影作业及内业数据处理
在申请空域完成的前提下,航空摄影作业应尽量选择晴朗、能见度好的天气进行航摄。为了确保经纬 M300 RTK 安全和解算稳定,选择空旷位置起飞,同时起飞位置尽量选择通讯网络信号较好的地方,避免电磁干扰、遮挡干扰比较严重的区域。另外,确保遥控器与飞行器连接良好,否则会影响后期解算精度。完成拍摄后,人工检查影像成像质量,如亮度、清晰度、色调、纹理等,同时需要将获取的原始 POS数据进行整理及处理,以备后续软件处理。获取原始影像及POS数据后,将原始影像及POS导入大疆智图软件,设置好坐标系统和高程系统,然后导入POS数据后选择好输出的内容,包括三维模型格式、点云、输出坐标系统等信息,完成后提交进行空三处理和三维模型重建等工作。成果经过内业解译人员人工处理及采集可得到该区域的DOM,DEM,DLG等4D数字产品。
4.7 精度评定及分析
为了评定不同航高对地形图精度的影响,采用人机交互方式检查,在 CASS10.1 软件中利用CASS3D加载三维模型,分别在4个不同航高生成的三维模型上获取所有外业布设的检查点坐标和高程。然后与外业实测的 85 个检查点经过对比和分析,剔除以下 3 种由外界环境产生误差较大的点:① 由于树木、建筑物等遮挡导致成图模型中无法读取地面点坐标和高程;② 检查点标志被人为破坏,无法准确获取地面点位置;③ 由于天气原因下雨后导致低洼区水位上涨将布设检查点淹没。剔除后,将剩余的点随机选取38个点进行实测检查点和量测坐标比对。通过计算,航高为150m 的点位中误差为σxy=±0.031m,高程中误差σz=±0.028m;航高为250m的点位中误差为σxy=±0.041m,高程中误差 σz=±0.032m;航高为350m的点位中误差为σxy=±0.055m,高程中误差σz=±0.046m;航高为450m的点位中误差为σxy=±0.077m,高程中误差σz=±0.059m,以上数据表明本次实验4种不同航高航拍处理后所得到的精度完全能满足1:1000数字测图要求。根据所计算中误差可以得到以下结论:①以经纬M300 RTK无人机和禅司P1相机为载荷拍摄的航高150,250,350 和 450m 所获取的数据得到的精度总体比较理想,平面和高程精度小有差异,可以满足大比例地形图测图要求。② 在成像条件相同、航高相对较低的条件下,得到的精度相对较高,而随着航高增加,所得到的成果精度呈逐渐下降趋势。
5结束语
综上所述,无人机航测技术经济效果显著,测量精确度高,在矿山地形图测绘中应用效果显著,能够发挥无人机航测技术优势,可降低相关测量标的误差,应用前景广阔。
参考文献:
[1]任本伟,彭占山.无人机航空摄影测量技术在矿区地形测量中的应用研究[J].测绘与空间地理信息,2021,44(04):202−207.
[2]崔晓荣,管志强,方祥,等.一种基于无人机的露天矿山生产调度指挥方法[P].中国:CN108759789A.2018−11−06.
[3]金爱兵,陈帅,赵安宇,等.基于无人机摄影测量的露天矿边坡数值模拟[J].岩土力学,2021,42(01):129−135.
[4]陈浩,孙健东,陈需,等.无人机技术在我国大型露天矿的应用及发展[J].露天采矿技术,2021,36(02):136−140.
[5]贾曙光,金爱兵,赵怡晴.无人机摄影测量在高陡边坡地质调查中的应用[J].岩土力学,2018,39(03):1130−1136.
[6]刘洋.无人机航空摄影测量技术在矿山地质环境治理中的应用分析[J].工程建设与设计,2018(20):275−276.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



