陕西延长石油集团管道运输第三分公司 陕西省延安市 716000
摘要:本文通过对无人机巡检数据的数字化处理,实现了对输油管道及场站全方位、无死角、全天候的巡检。提升了对原油渗漏及偷油盗窃的精确度,大大提升了检测的效率。
关键词:石油管道渗漏;无人机;智能巡检
1 智能巡检系统
热成像技术可第一时间实现全局视角检测,发现原油渗漏、高温点、以及站场的可疑热源,并将可疑信息快速提供给指挥大厅的巡检人员。弥补了传统的检测手段夜间检测的不足,相比于传统的人工巡检,在检测范围、检测对象、检测能力上,无人机智能巡检系统都具备良好的优越性。此外,通过部署无人机智能巡检系统,巡检过程中无需停工,可实现以“机巡为主、人巡为辅”的全天候、全方位巡检方式。
2 实验
2.1 实验场地
本实施方案以延长石油(集团)管道运输第三分公司姚店联合站为研究试点,共有巡检区域5个,各巡检区域内含外输区域、罐区、废水排放池、拦油坝、计量区、回水池等巡检对象。外输区共含有巡检区域8个,主要检查是否存在异常地温、原油外漏、质量流量计异常、原油回水池溢出等隐患。
2.2 硬件
飞行平台部署了大疆经纬M300RTK,这是大疆史上性能最强的综合性旗舰飞行巡检平台,可实现日常巡检及数字化航测建模,同时还可实现通讯、照明等多种功能。M300RTK具备近1小时的续航能力、360°避障能力、雨中作业条件、7级抗风能力,其在线任务录制功能可实时录制飞行器运动、云台俯仰、照片拍摄、变焦等多种动作,AI算法可自主比对目标区域和当前的实时画面,并据此纠正相机的拍摄角度,所搭载的航点飞行 2.0 的智能航线规划模式下的飞行路径设定方式更加灵活,大幅提升了自动化任务效率。
所用多功能巡检相机为禅思H20T相机,配合M300RTK实现智能巡检。禅思H20T为四合一多功能巡检相机,搭载一体化集成广角相机、变焦相机、热成像相机、激光测距仪传感器,可实现全天候飞行巡检作业。数字化航测相机部署禅思P1,搭载有4500万全画幅像素传感器、三轴云台智能摆动拍摄及1/2000秒机械全局快门,配合M300RTK实现站场数字化建设数据的采集,以及精细化巡检。禅思P1配合M300RTK,以及数据后处理软件,可实现高精度、高效率、高质量的站场实景模型建设。基于站场实景模型,可进行精细化航线路径规划,配合H20T相机,实现精细化巡检。
2.3 软件
数据后处理软件部署大疆智图测绘版电力永久版,配合飞行平台实现站场数字化建设以及精细化巡检。
实时二维重建、二维多光谱重建、KML文件导入、影像POS导入、三维重建、三维航线规划、多显卡重建、激光雷达点云精度优化、实时三维重建、精细化巡检等重点功能。无人机综合管理云平台对巡检数据实行闭环管理,该平台将无人机画面实时回传至站控室,并对无人机飞行数据、巡检图像进行统一管理,并将数字化模型成果导入平台,对不同时期的数字化模型可通过平台进行直观对比分析。
2.4 巡检数据收集
首先对关键巡检点做数据采集,使用经纬M300RTK搭载H20T巡检相机,通过手动飞行对罐区、外输区、废水排放池、拦油坝、计量撬等重点区域的关键巡检点进行图像采集,共采集关键巡检点约60余个。使用在线任务录制功能,将每个巡检区域拍摄的照片生成一条巡检航线,设置每个巡检点云台相机的执行动作为拍照(或录像)并保存,后期常规巡检可通过调用航线实现自动化飞行巡检。
在完成对关键巡检点的数据采集后,开始对站场做数字化应用数据采集,使用M300RTK搭载全画幅航测相机,下载区域地图或连接网络加载在线地图,通过航线规划模式,在站场上空设置飞行路线、飞行高度、速度、GSD等数值,在遥控器地图界面圈定目标区域自动采集原始航测影像数据及位置姿态数据、POS数据,并生成二维/三维模型数据进行位置、面积、长度、体积的测量。共采集了378张二维正射图数据与1993张三维实景模型数据,实验中二维正射数据采集与三维模型数据采集过程分别如图1和图2所示。
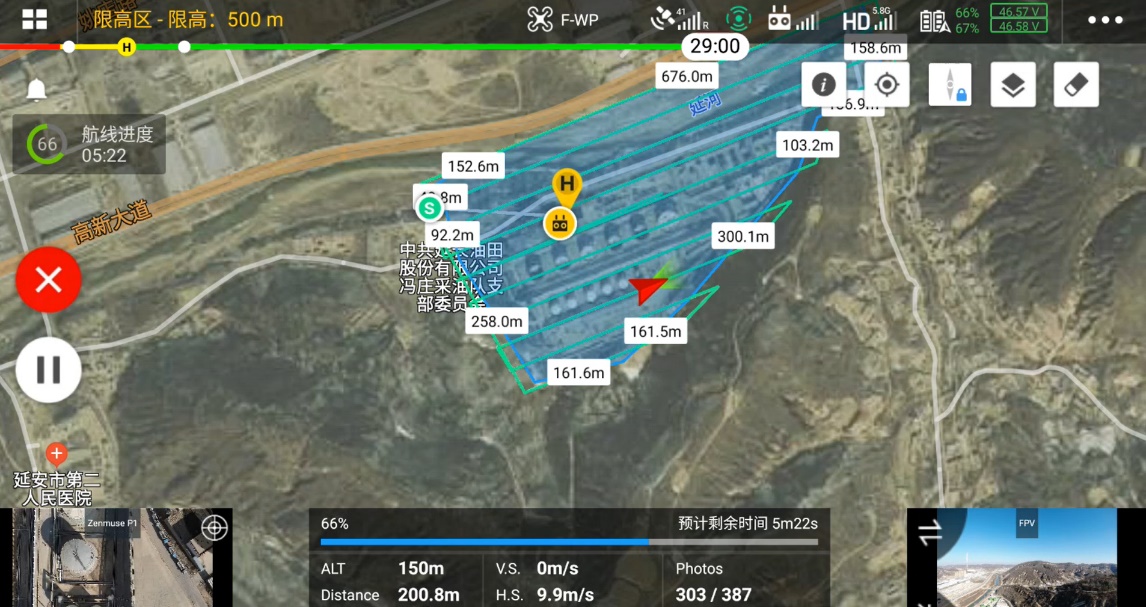
图1 二维正射数据采集(飞行高度149米,平均飞行速度9米/秒,采集照片量387张,耗时约13分钟)
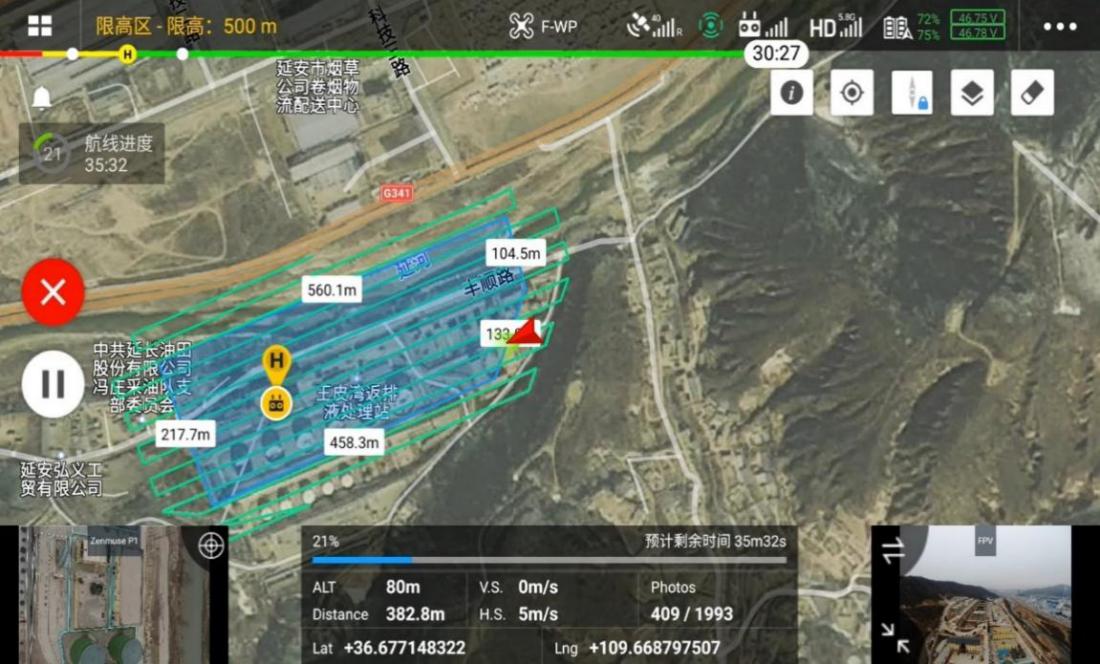
图2 三维数据采集(飞机飞行高度80米,精度误差1厘米,平均飞行速度4米/秒,共采集照片1993张,耗时约50分钟)
2.5 巡检数据处理
基于二维正射图与三维模型图,通过大疆智图软件对关键巡检区域进行精细化巡检航线规划,优化巡检路径,将设置好的航线路径导出成KML文件,并导入遥控器当中。实验中规划后的巡检路径为外输区-废水排放池东-拦油坝-罐区-计量区、回水池-废水排放池西。
2.6 实验分析
站场大范围巡检可通过航线飞行快速实现大范围的巡检工作,为地面人员提供空中情报信息。关键区域巡检可调取在线任务录制中的航线任务,或调取三维实景模型规划的航线任务KML文件,实行自动化飞行巡检。巡检中若发现关键区域出现安全隐患,如罐区输油管线出现原油滴漏问题,可暂停航线,无人机悬停空中,通过变焦镜头放大进一步确认局部细节。同时,在巡检过程中,可通过可见光和热成像相机分屏模式巡检,提供更加丰富的地面情报信息。使用M300RTK搭载P1相机,配合大疆智图,生成站场二维、三维模型数据,定期对场站进行数字化模型存档。通过快速二维三维模型实现站场数字化。通过模型数字化呈现整个场站的巡检结果及设备状况。通过无人机热成像,可实现夜间的站场巡检。实现了全天候、全方位的站场智能化巡检。
结论
本文开展相关实验,为无人机智能化巡检提供了现实案例,具有可观的现实意义。无人机智能化巡检系统具有成本低、检测效率高、全方位、全天候的优点,增强了巡检过程的数字化、可视化、立体化。
参考文献
[1]关博宇.石油管道泄漏检测定位技术的研究与开发[J].自动化与仪器仪表,2017(S1):26-28.
2

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



