1.中海石油(中国)有限公司湛江分公司,广东 湛江 524057; 2.广东工业大学 自动化学院 广东 广州, 510006
摘要:永磁同步电机(PMSM)有结构简单、运行稳定性好、功率密度大、损耗小等优点,被广泛应用于高性能的伺服和调速系统中,在海上生产平台具有很好的应用前景。以PMSM为控制对象,分别设计了速度环PI、IP、PDFF控制器。在MATLAB/Simulink中建立了包括矢量变换、空间矢量(SVPWM)生成和控制器等模块在内的PMSM矢量控制系统仿真模型,并对相关控制算法进行了仿真验证。同时,也提供了速度环、电流环和位置环控制器的参数整定方式,以满足伺服系统控制要求的控制器参数,最终满足海上生产平台的运行工况要求。
关键词:交流伺服,永磁同步电机,PDFF,参数整定,MATLAB/Simulink,海上生产平台
Design of permanent magnet synchronous motor servo system regulator for offshore production platform
Abstract:Permanent magnet synchronous motor (PMSM) has the advantages of simple structure, stable operation, large power density, small loss, etc., which is widely used in high-performance servo and speed regulation system, and has a good application prospect in offshore production platform. Taking PMSM as control object, the current loop PI controller, speed loop PI controller, IP controller, PDFF controller and position loop feedforward controller are designed respectively. The simulation model of PMSM vector control system including vector transformation generation and controller,SVPWM generation and controller is established in Matlab / Simulink, and the relevant control algorithms are simulated and verified. The parameter setting methods of current loop, velocity loop and position loop controllers are also given, and the controller parameters that meet the control requirements of servo system are set to meet the operating requirements of offshore production platform.
近年来,随着各行业都在规划行业的“双碳目标”,石油行业也积极行动,部分海上生产平台由于服役时间较长,部分电机已经成为不符合现行国家能效标准要求的、落后的、低效的存在,需要选用适合海上生产平台工况、高效、节能的电机进行替换。针对海上生产平台需长时间不间断运行,高温、高湿、高盐,电网“孤网”抗冲击性差的运行特点,在石油化工领域中广泛的应用伺服系统在得到了研究人员的关注,特别是功率因数较高、结构简单、占用空间不大等优点的三相永磁同步电机(PMSM)。
本文根据海上生产平台电机应用的特点,分析了永磁同步伺服系统的控制原理,对采用三环控制结构的伺服系统的控制器参数整定进行设计分析。传统伺服控制中应用最多的是PID控制,而调速系统要求以动态稳定和稳态精度为主,所以在电流环以及转速环方面最主流的方式和方法是采用PI调节器的整定方法,其中的电流控制思路是选用常规的PI调节器。转速调节器是调速系统的主导调节器,对负载变化起抗扰作用,本文设计了三种不同的转速调节器,并比较分析了不同调节器的优缺点。由于位置环是高阶动态调节系统,这就使得控制器的设计变得复杂。位置环的主要目标是快速跟踪给定,由于转速环的不同,给出了对应的位置环设计方法以及参数整定。最后,仿真对比验证了不同控制器的控制效果,以遴选出更适合应用在海上生产平台的设计。
根据电动机自身的特点分析,首先假设:
1. 三相定子绕组对称,在空间中互差120度,产生的磁动势按正弦规律分布;
2. 忽略磁路饱和、涡流及磁滞损耗,认为各相绕组自感和互感都是恒定的;
3. 忽略定子磁场高次谐波,电机反电动势呈正弦规律分布;
4. 假定转子上为无阻尼绕组,永磁体也无阻尼作用。
 21\* MERGEFORMAT (-)
21\* MERGEFORMAT (-)
磁链方程为:
 22\* MERGEFORMAT (-)
22\* MERGEFORMAT (-)
转矩和运动方程为:
 23\* MERGEFORMAT (-)
23\* MERGEFORMAT (-)
 24\* MERGEFORMAT (-)
24\* MERGEFORMAT (-)
其中, ,
, ,
, ,
, ,
, ,
, ,分别为
,分别为 轴坐标系下的定子电压、电流和磁通,
轴坐标系下的定子电压、电流和磁通, 为定子电阻,
为定子电阻, 为转子电角速度,
为转子电角速度, 为转子机械角速度;
为转子机械角速度; 为永磁体磁链,
为永磁体磁链, 为定子绕组电感,
为定子绕组电感, 为磁极对数。
为磁极对数。
永磁同步电机伺服系统是多环控制系统,由内到外分别为电流环、速度环、位置环,其原理框图如图2-1:
图2-1 永磁同步电机伺服系统原理框图
其中, 、
、 分别为速度环、电流环的反馈系数。
分别为速度环、电流环的反馈系数。 为给定转速和实际转速,
为给定转速和实际转速, 为给定转角和实际转角,APR为位置调节器,ASR为速度环调节器,
为给定转角和实际转角,APR为位置调节器,ASR为速度环调节器, 分别为速度环、电流环的滤波时间常数,
分别为速度环、电流环的滤波时间常数, 为给定电流和实际电流,ACR为电流环PI调节器,
为给定电流和实际电流,ACR为电流环PI调节器, 为逆变器的失控时间,
为逆变器的失控时间, 为电磁时间常数,
为电磁时间常数, 分别为电磁转矩系数和反电动势系数, 为负载转矩,
分别为电磁转矩系数和反电动势系数, 为负载转矩, 为转动惯量。因为电机在实际运转过程中不是一个无限量的模型,受控条件有电枢电压、允许最大转速、电流等等,因此需要对电机的位置环调节器、速度环调节器和电流环调节器的输出值进行一定程度上的限额。
为转动惯量。因为电机在实际运转过程中不是一个无限量的模型,受控条件有电枢电压、允许最大转速、电流等等,因此需要对电机的位置环调节器、速度环调节器和电流环调节器的输出值进行一定程度上的限额。
设计时遵需要循从内环到外环,逐一设计的原则:设计好电机的电流调节器(电流环作为速度环的一个关键被控对象)——设计速度调节器(设计好的速度环作为位置环的一个关键被控对象)——设计位置调节器。电流环在系统中起到的作用是提高系统的响应时效,同时起到了抑制电网电压波动的作用;速度环在系统中起到的作用是提高系统抗负载扰动能力,同时起到了抑制转速的波动;位置环在系统中起到的作用是跟随给定,对所处进行位置精确控制和定位。这里仅给出速度环三种方法设计和对比。
采用工程整定方法设计速度环PI调节器。电流环时间常数 转速滤波时间常数为
转速滤波时间常数为 。因此转速小时间常数为
。因此转速小时间常数为 。选用PI调节器,其传递函数为
。选用PI调节器,其传递函数为
 (3-1)
(3-1)
取 ,ASR的超前时间常数为
,ASR的超前时间常数为 。转速开环增益为:
。转速开环增益为:
 (3-2)
(3-2)
又有:
 (3-3)
(3-3)
因此,PI参数为:
 (3-4)
(3-4)
 (3-5)
(3-5)
检验近似条件:转速截止频率为
 (3-6)
(3-6)
电流环简化条件: 满足简化条件;
满足简化条件;
小惯性环节合并条件: 满足近似条件。
满足近似条件。
通过画幅频特性曲线得出转速环截止频率为 ,带宽为
,带宽为 。方法与电流环的类似。
。方法与电流环的类似。
证明:在设计速度环控制器时,电流环可以等效为1。
设计转速环的时候,可将电流环降阶为一阶惯性环节,其闭环传递函数变为:
 (3-7)
(3-7)
可得等效环节的频率特性和相频特性函数:
 (3-8)
(3-8)
 (3-9)
(3-9)
式(3-8)与式(3-9)说明了:高频、中频、低频信号对电流环的影响。对电流环来说,当输入信号在低频段时,即 时,可以看成输入信号经过电流环等效环节的幅值不变,相角不变,即电流环可以看成1的环节。
时,可以看成输入信号经过电流环等效环节的幅值不变,相角不变,即电流环可以看成1的环节。
图3-1 电流环等效环节 的Bode图
的Bode图
由于转速环的截止频率远小于电流环的截止频率,即 ,而转速环工作在截止频率
,而转速环工作在截止频率 以下(即转速环的工作频率ω< )。因此,可以将电流环等效成
以下(即转速环的工作频率ω< )。因此,可以将电流环等效成 即:在设计速度环控制器时,电流环可以等效为[6]。
即:在设计速度环控制器时,电流环可以等效为[6]。
本设计中, 。画出 的Bode图如图3-1所示。而转速环工作在 的中低频段,其对转速环的影响可以忽略不计,但对系统高频特性有较大影响。
。画出 的Bode图如图3-1所示。而转速环工作在 的中低频段,其对转速环的影响可以忽略不计,但对系统高频特性有较大影响。
由于传统的PI调节器存在超调大、抗扰性较差等缺点,针对此缺点本文采取IP调节器[12]。结构原理框图如图3-2:
图3-2速度环采用IP调节器结构原理框图
从控制框图中可以看出,主控制回路仅为一个积分环节,其目的是为了保证在系统闭环响应时没有稳态误差,同时也避免了微分突变的影响。
由图3-2可知速度环闭环传递函数:
 (3-10)
(3-10)
式中 为积分系数,
为积分系数, 为比例系数,
为比例系数,
 (3-11)
(3-11)
在零初始条件下的阶跃响应的上升时间为:
 (3-12)
(3-12)
根据期望的上升时间和阻尼比可以计算出积分系数和比例系数。
本设计中,取 ,
, ,根据式(3-1)与式(3-12)带入对应参数,可以计算得到参数
,根据式(3-1)与式(3-12)带入对应参数,可以计算得到参数
、 的值,即有:
 (3-13)
(3-13)
画幅频特性曲线图,得出IP结构下转速环的截止频率和带宽分别为 。从截止频率和带宽可以看出,IP结构速度环的响应要比PI慢。
。从截止频率和带宽可以看出,IP结构速度环的响应要比PI慢。
当系统中的速度环选取的是PI控制器时,其在系统中的调整速度较IP的情况是更高的,但是也不可避免的会导致了超调的程度更深;虽然对系统的速度环采用IP控制器在系统中的调整速度会相对于以上的较慢,但是其存在的超调程度也是相对较浅。为了取长补短,提出了速度控制器选取PDFF速度控制器的方法。其控制框图如图3-3。
图3-3 PDFF速度环控制框图
PDFF控制器相对于其他的控制器较为简洁方便,是速度环控制器中较为适合的,当改变PDFF控制器参数 、
、 、
、 的值时,将构成不同的速度环控制器。当
的值时,将构成不同的速度环控制器。当 时,PDFF结构就变成了IP控制器的结构;当
时,PDFF结构就变成了IP控制器的结构;当 时,控制器类似PI结构;其还可以构成前馈控制器等。其中
时,控制器类似PI结构;其还可以构成前馈控制器等。其中 作为输入的扰动信号。
作为输入的扰动信号。
由图3-3求得速度环的闭环传递函数为:
 (3-14)
(3-14)
由PDFF传递函数可知,速度响应 受到速度给定
受到速度给定 与干扰 影响;而扰动并不会因参数 的变化而影响。因此,前馈通道
与干扰 影响;而扰动并不会因参数 的变化而影响。因此,前馈通道 主要完成对给定信号的跟踪;而反馈通道 与
主要完成对给定信号的跟踪;而反馈通道 与 作为主通道,其目的和意义是对由扰动和模型误差所产生的偏差值进行快速补偿。
作为主通道,其目的和意义是对由扰动和模型误差所产生的偏差值进行快速补偿。
将输入 设置为0,则干扰与转速输出的传递函数为:
 (3-15)
(3-15)
考虑扰动 为单位阶跃信号,即 。根据(3-15)式,则有:
。根据(3-15)式,则有:
 (3-16)
(3-16)
将分母化为标准二阶系统,即:
 (3-17)
(3-17)
结合式(3-16)与(3-17),可得:
 (3-18)
(3-18)
因此,只需要根据标准二阶系统的特征,设计 与
与 就可以获得相应的控制器参数。关于 与 的选取,可以根据二阶系统频域指标带宽频率
就可以获得相应的控制器参数。关于 与 的选取,可以根据二阶系统频域指标带宽频率 、截止频率
、截止频率 与两者的关系选取,其关系为
与两者的关系选取,其关系为
 (3-19)
(3-19)
关于带宽的选取可以参考《自动控制原理(第六版)》第234页提到的“系统带宽的确定”进行选取。本设计中 .因此可以求得参数 与 。 值一般取值范围是
.因此可以求得参数 与 。 值一般取值范围是 ,通过改变γ值,可以改善对给定信号的跟踪效果。为了兼顾超调量与调节时间γ取0.75。
,通过改变γ值,可以改善对给定信号的跟踪效果。为了兼顾超调量与调节时间γ取0.75。
画幅频特性曲线图,方法如电流环求截止频率带宽的类似。通过幅频特性曲线图可以得到:

采用三相半桥逆变拓扑结构。电流环采用PI结构,速度环采用IP结构,位置环采用前馈控制的三环伺服系统原理图如图4-1所示。
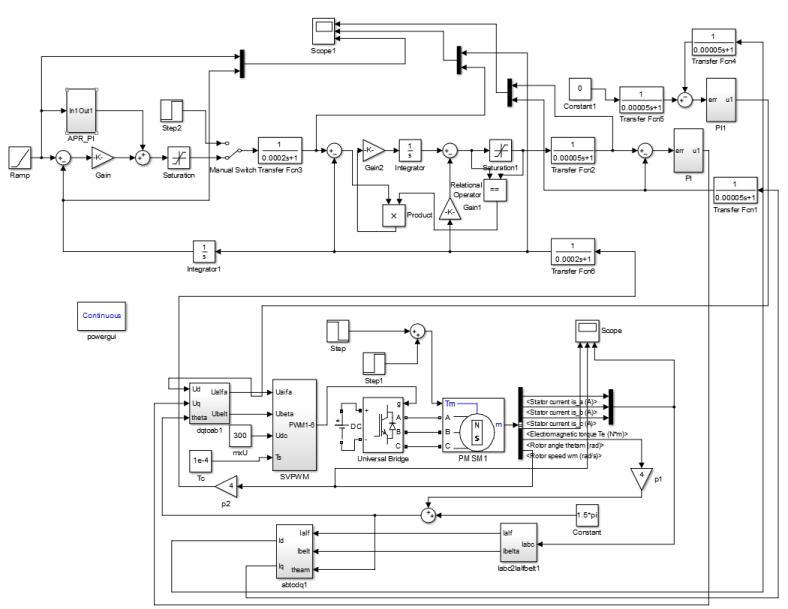
图4-1 速度环IP结构的三环伺服系统仿真图
若速度环采用PDFF控制器,只需要在IP结构加上前馈系数 即可。若速度环采用PI调节器则只需将速度环的IP结构环成PI调节器。在仿真中速度环限幅采用的是Anti-Windup方式限幅。
仿真时,位置给定为斜率为10的斜坡信号,并在位置环加入前馈消除位置的稳态误差。仿真图中,从上到下分别为电流环、转速换、位置环波形图。比较不同速度环控制器对电流、转速、位置的跟踪效果。
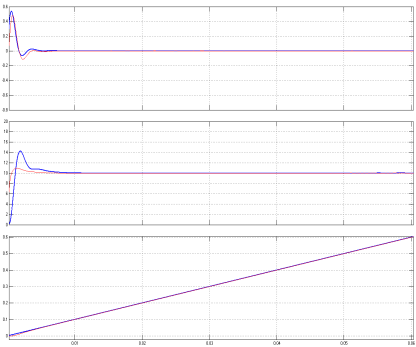
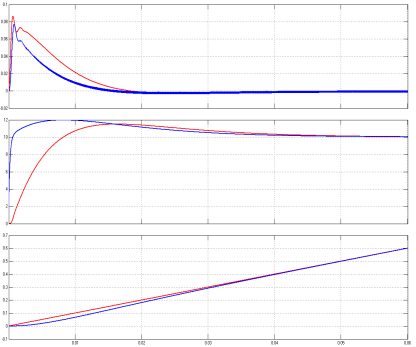
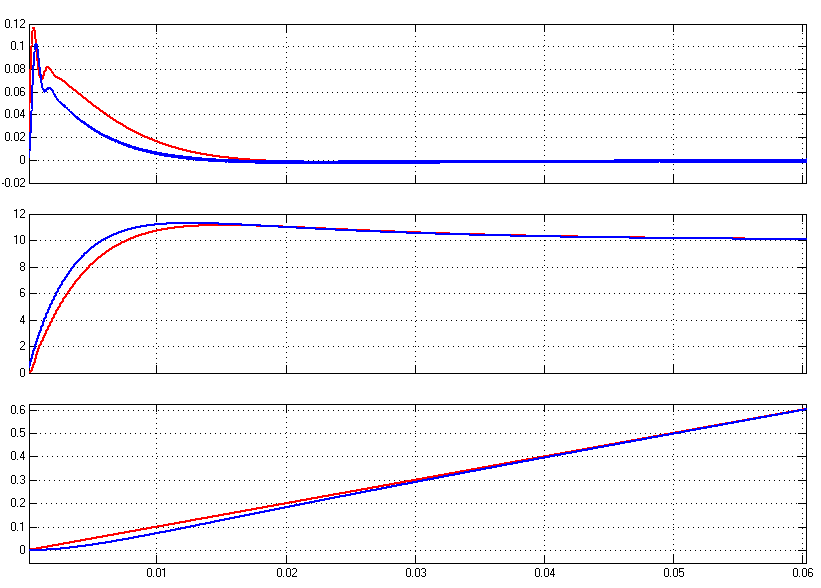
图4-2 速度环为PI结构 图4-3 速度环为IP结构 图4-4 速度环为PDFF
在电机启动阶段,速度环为PI的三环系统响应速度较IP结构快,约在0.008s时达到稳定状态;而速度环采用IP结构的三环系统调节时间最长,约为0.02s;而速度环为PDFF的三环结构的调节时间因参数 的不同存在差异——随着参数 值的增大,调节时间在减小,但是超调量产生并逐渐增大。另一方面,采用PI下的三环结构中,三环都出现了超调,位置环是不希望出现超调的;IP结构下没有超调;PDFF结构的超调受参数 、 、 影响。当控制系统为PDFF结构时,只要PDFF的三个参数设置合适,是可以满足控制要求的。
为了比较不同控制器的抗扰性能,位置给定是值为10的斜坡信号,在仿真时间 时加0.5倍的额定负载,观察电机从空载到负载状态时的响应效果;系统在
时加0.5倍的额定负载,观察电机从空载到负载状态时的响应效果;系统在 时都达到稳定状态,减0.5倍的额定负载,观察电机从负载状态到空载的仿真效果。
时都达到稳定状态,减0.5倍的额定负载,观察电机从负载状态到空载的仿真效果。
图4-5 PI结构三环加载仿真图 图4-6 IP结构三环加载仿真图 图4-7 PDFF结构三环加载仿真图
结论:一是IP控制前向通道需要经过一个积分环节,因积分的计算导致响应时间会相对的增加,但其对于系统所产生的一定量的干扰可以迅速复原;二是PI控制的系统响应时效较高,但其对于系统所产生的一定量的干扰复原能力不强,当干扰短时或者长期存在时,系统整体性能就会出现整体的下降;三是PDFF的参数设置在恰当的范围内以适应工况时,不仅具备了上述PI控制的时效性,同时还具备了IP控制的抗扰性,其更适合海上生产平台的工况,稳定性更好,预计其应用效果更佳。
[1] 阮毅,陈伯时. 电力拖动自动控制系统-运动控制系统[M]. 机械工业出版社,2009.
[2] R.Krishnan著. 永磁无刷电机及其驱动技术.柴凤等译[M]. 北京:机械工业出版社,2012.
[3] 钱健. 永磁同步电机伺服控制系统研究[D]. 徐州:中国矿业大学,2016.
[4] 曾孟雄,方春娇. 基于PMSM的交流伺服系统电流环设计及整定[J]. 组合机床与自动化加工技术,2009.
[5] 曾孟雄,赵千惠,欧阳文. 基于PMSM 的三环数控交流伺服系统[J]. 组合机床与自动化加工技术,2012.
[6] 王莉娜,朱鸿悦,杨宗军. 永磁同步电动机调速系统PI控制器参数整定方[J]. 电工技术学报,2014.
[7] 廖国强. 交流永磁同步电机伺服驱动器研究[D]. 华东交通大学,2016.
[8] 张海明,缪仲翠. 双闭环直流调速系统“抗饱和”速度控制器设计[J]. 微特电机,2016.
[9] 吴云,王天施,杜明娟. 积分分离法调节器直流调速系统研究[J]. 仿真技术,2009.
[10] 邵雪卷,张井岗,赵志诚. 双闭环直流调速系统的饱和限幅问题[J]. 电气电子教学学报,2009.
[11] 寇宝泉,程树康. 交流伺服电机及其控制[M]. 北京:机械工业出版社,2008.
[12] 蔡豪,汪亮亮. 二自由度PID在PMSM电流环中的应用[J]. 机电工程技术,2017.
[13] 李明,程启明,陈根. 永磁同步伺服电机二自由度控制[J]. 控制与应用技术,2014.
[14] 陈金圣,李峰吉,陈建旭. 速度伺服回路与前馈控制器设计[J]. 控制技术专辑,2012.
[15] 王宏佳,杨明,牛里. 永磁交流伺服系统速度控制器优化设计方法[J]. 电机与控制学报,2012.
[16] 胡寿松. 自动控制原理(第六版)[M]. 北京:科学出版社,2013.
[17] 高雨晨. 数控机床伺服系统控制性能研究[D]. 广东工业大学,2015.
[18] 李光泉. 基于PDF调节器的MC-PMSM矢量控制系统开发[D]. 南京航空航天大学,2010.
[19] 卜柏营,唐猛,李海. 基于PDF策略的电机调速系统设计与仿真[J]. 重庆理工大学学报,2011.
[20] 杨明,贵献国,徐殿国. 控制系统Anti-Windup设计综述[J]. 电机与控制学报,2006.
[21] 朱志超. 伺服驱动器速度环设计[D]. 西安电子科技大学,2014.
3

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



 下的定子电压为:
下的定子电压为: