西安爱生技术集团有限公司 陕西西安 710065
摘要:无人机近年来在军事及民用领域得到了长足的发展。集群化应用被认为是小型化无人机未来重要的应用模式,如大规模协同测绘,协同感知等。在军事应用方面采用有人无人协同技术,通过快速部署的无人机集群能够进行抵近协同侦查和干扰,以及利用体积小、成本低的优势进行饱和攻击,具有极大的对抗优势。
关键词:无人机;集群数据链;技术的探讨
一、无人机集群组网技术
1.1面向任务集群组网架构
对于传统的网络而言,当节点数量到达一定数量级时,网络开销会急剧增大,同时网络性能会迅速恶化。依托于传统的通信架构构建无人机集群网络无法保障实时性与可靠性。近年随着数据链技术的发展,采用基于数据链控制策略构建大规模节点协同模型的方法不断得到重视。
无人机集群在指定空间范围执行任务时,密集组网,存在着较严重的信道干扰,同时信道质量随着空间环境的变化时变剧烈。物理层需要采集信道信息,对信道拥塞等级进行合理分类,同时应用层对当前业务要进行合理的消息分级策略,通过网络分级保障能够在信道资源良好时对全部业务消息进行发送,而在信道资源变差时,优先发送关键消息,同时兼顾低优先级业务一定程度的发送量,如图1所示。无人机集群的自组织路由策略采用基于发现的路由配置及重构策略,同时基于任务需求及节点可信信息对路由进行灵活管理,即对节点在一段时间消息处理行为进行记录和评估,基于信息论原则进行可信度量,对于信任值较低的节点采取减轻负载的策略,对于可能被干扰或被控制的节点采取告警绕行策略,避免出现中继失败多次重发。多跳组网情况下,能够有效提升可靠性和灵活性,保证消息准确可达。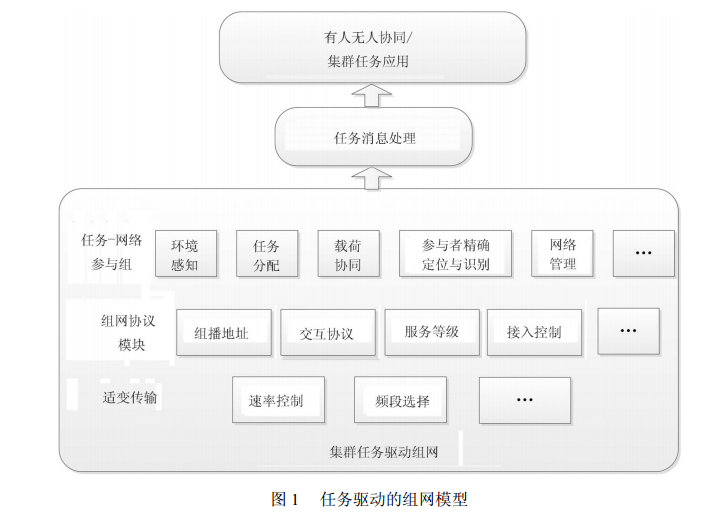
每个无人机平台在执行任务过程中,根据当前任务需要,不一定需要收发所有类型的消息,而是只需处理特定类型的消息。并且不同业务的消息对网络传输时延、传输带宽以及参与此业务的平台数量要求有着极大的差异。如协同控制类的消息要求最低传输时延在毫秒级,而传感器协同则要求时延秒级即可。考虑到不同任务类型消息所需网络保障能力的差异化,在网络设计中把消息按照功能进行分组,这些分组称为任务–网络参与组。将消息分类归属于不同的任务–网络参与组,并为各个任务的特定需求分配网络资源,例如不同类型的任务–网络参与组采用不同的服务等级、组播地址分配、消息交互协议。这样能够实现基于任务功能对网上传输的数据作选择管理,在大规模组网时当前时刻只有任务需要的用户才能接入这个任务–网络参与组,从而才能够接收相应的消息,再将消息发送到需要的地方。这样设计实现了任务驱动网络的组织,反过来网络的组织策略更自适应集群任务对网络传输的需求。
1.2面向任务的网络智能管控
1)应用层的业务消息对网络服务能力的需求。
2)物理层感知的信道状态、接收到的各类业务消息、路由消息及网络感知消息反应的信道状态。
3)链路层和网络层的拥塞状态,包括节点转发拥塞、排队处理拥塞等。感知模型的输出信息有:
1)网络当前性能状态:网络拓扑、网络链路负载。
2)网络发展趋势:网络拓扑变化趋势、网络重要节点职责变更、网络链路负载趋势等。
通过网络态势感知,能够在指定空间的复杂环境里对集群网络的变化作出预判,从而快速分配资源,保障当前网络关键节点性能,在动态环境里支撑任务遂行。
二、无人机集群路径临机规划技术
2.1环境建模
对于动态航迹规划问题而言,进行精细的、实时的环境建模是非常耗费计算资源的,不仅要占用较多的存储资源,同时进行航迹碰撞检测也非常复杂,这势必会影响算法的计算实效性。通常工程上的做法是,提取障碍物的特征参数构建进行近似的几何包络模型,如图2所示。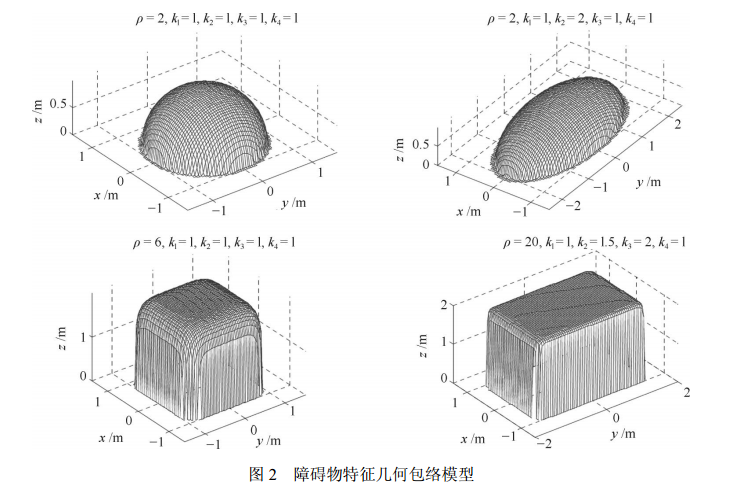
2.2集群路径自主规划
信息及控制理论研究认为,群居生物间的协作和控制模式在实际工程中具有很大的应用前景。通过对生物智能集群行为的探索涌现了诸多优化算法,如蚁群算法(AntColonySystem,ACS)和粒子群优化算法(ParticleSwarmOptimization,PSO)。传统优化算法一般是在解空间建模完成后,针对目标函数给出较优解。然而无人机集群协同的场景中,信息获取是局部逐步逼近全局并且时变的过程,意味着无法快速构建全局模型,同时当前模型的参数和状态也是时变的,优化算法在搜索过程中,很容易陷入局部最优解中,从而得出的路径信息往往不能满足无人机集群的需求。
首先集群中的每个节点在1跳范围内进行感知,判断自己是否到达任务指定的目标区域,并且用“电子信息素”的方式表征。节点在1跳范围内发送本地电子信息素,周围节点则根据信息素的耗散情况判断当前位置与目标区域的远近关系。信息素具备时间耗散特点,只有相同元素项被接收时,才能进行加成。每个节点按照1跳范围内接收的信息元素项调节本地节点运动方向。节点感知和存储的信息素强度变化可用公式表达:
![]()
其中,p=fpig表示节点集合;S(t;p)表示信息元素强度;r(t;p)表示额外输入的信息元素强度;q(t;p)表示在t时刻传播到节点p的信息元素强度;E2(0;1)为信息元素减弱参数;F2[0;1)为信息元素传播参数;式(3)描述了在节点p处信息元素强度的变化情况,第1项为时间带来的信息素的耗散,这是信息素的自然特点,第2项为新加入的节点在1跳范围内发送同类型本地电子信息素所带来的增强效果;第3项为1跳范围内的邻居节点发送的本地电子信息素带来的增强效果。
三、结论
本文针对无人机集群应用的特点,在数据链组网架构的基础上提出一种基于分布式优化方法的集群动态协同策略,能够支撑大规模无人集群的协同控制。随着无人系统载荷的计算能力迅速增强,通过与网络架构耦合设计的智能协同算法,能够有效提升无人集群的自主协同能力,相较于传统优化算法而言,对获取全局信息的要求减小,有助于应用于实际场景。
参考文献:
1杨晨,张少卿,孟光磊。多无人机协同任务规划研究[J]。指挥与控制学报,2018,4(3):234−248。
2沈震,刘雅婷,董西松,等。平行机群:概念、框架与应用[J]。指挥与控制学报,2018,4(3):201−212。
3梁晓龙,孙强,尹忠海,等。大规模无人系统集群智能控制方法综述[J]。计算机应用研究,2015,32(1):11−16。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



