合肥工业大学汽车与交通工程学院 安徽 合肥 230009
摘要:仿生鸟是一种轻型飞行器,它具有体积小,质量轻,便于携带等优点,在军用和民用领域有着非常大的应用潜力。目前世界上已经研制出来许多仿生鸟,但是仿生程度仍然较低,本文基于目前仿生鸟的研究状况,通过引用变胞机构,对仿生鸟的腿部和翅膀进行了创新与设计,实现了仿生能进行陆空两种工作模式的自由切换,最后展望了基于单自由度变胞机构的轻型陆空两栖陆空仿生鸟的未来应用价值。
关键字:仿生鸟、变胞机构、机构设计、3d建模、扑翼机构、单自由度。
仿生机械是模仿生物的形态、结构和控制原理并将这些移植于人造工程技术中,制造出功能更集中、效率更高并具有生物特征的机械。研究仿生机械的学科称为仿生机械学,它是20世纪60年代末期由生物学、生物力学、医学、机械工程、控制论和电子技术等学科相互渗透、结合而形成的一门新兴学科[4]。
变胞机构(Metamorphic/Reconfigurable Mechanism)起源于对折纸进行的机构学研究。这一新型机构具有变拓扑结构,通常构件数和自由度也可以进行改变,与传统机构的特点明显不同。用进化论和生物学细胞分裂重构的观点进行解释为该机构具有变胞功能。变胞机构是一种可重构机构,其概念于1998年由J.S. Dai和Rees Jones提出[1]。随着时间推移,变胞机构受到越来越多研究者的关注,并逐渐成为机构学新的研究热点。目前对变胞机构的设计理论包括李群李代数(Lie Group /Lie Algebra)[2]、旋量代数理论 (Screw Algebra Theory) [3]等。
面对当前小型飞行器的研究飞速发展,国内外已经发明制造出多种用途的飞行器并将其运用于生活。相比于国外,国内的小型飞行器技术仍有较大的提升空间。本项目致力于基于变胞机构的单自由度仿生机械鸟的研究,通过引入变胞机构后使它的机身变得更小,整体更加轻量化。
通过在户外观察鸟类的飞行状态,并通过网络查询鸟类飞行运动规律,对鸟类腿部运动的数据进行了采集,通过MATLAB软件对数据进行分析,得到近似的鸟类奔跑时的步态曲线。
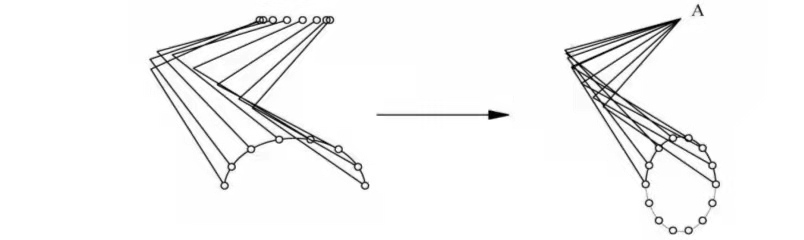
图1鸟类奔跑时的步态曲线
我们根据获得的腿部的步态曲线,对其腿部的机构进行构型的选择。考虑到要实现腿部的奔跑动作,为了便于控制,优先选用单自由度的机构。对平面机构来说,单自由度一般选择四杆和六杆机构来实现。在对四杆进行模拟后可发现其与真实运动的轨迹相差较大,运动不平稳,不容易实现稳定的奔跑动作,故决定选用六杆机构来实现其奔跑动作。查阅相关论文(《Task Driven Geometric Synthesis of Planar and Spherical Mechanisms》,Ping Zhao)可知,单自由度六杆机构的种类有瓦特型和斯蒂芬森型。对资料整理分析后,我们采用了斯蒂芬森型六杆机构进行了相关的设计。
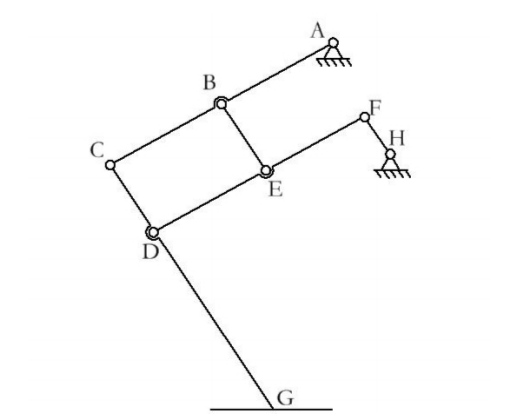
图2基于斯蒂芬森型六杆机构进行仿生鸟腿部设计
所设计的扑翼飞行器将应用于低空侦察等。因此,飞行器须具有较强的仿生性,能够模拟中小型鸟类的扑翼动作,以承担跟踪地面移动目标的任务,并能完成在一定区域内的侦察及搜寻工作。以中小型鸟类为参照进行扑翼飞行器总体尺寸的设计。为了防止造成机翼在扑动时的不对称性,本设计基于齿轮传动机构,参考 Smart bird 仿生鸟的翅膀部位进行初步设计,通过设计齿轮之间的啮合情况,带动仿生鸟的翅膀实现对称的扑动。此举既保证了扑翼的对称性,又降低了结构的复杂性。
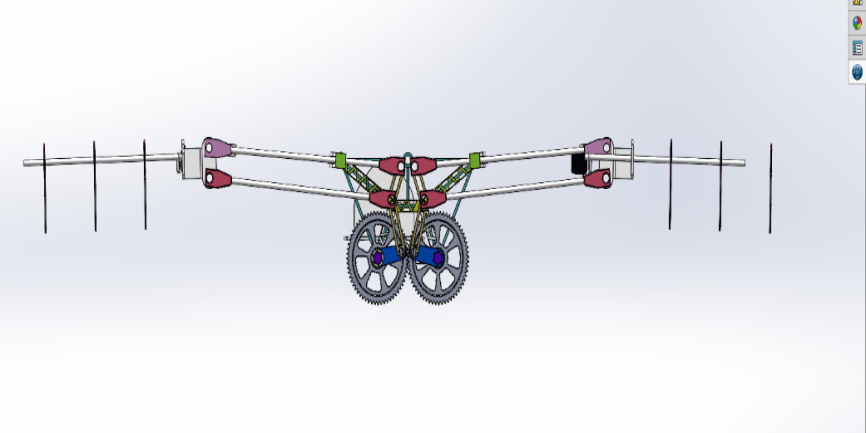
图3翅膀部位建模
为了拓宽扑翼机器人的工作空间,使其能够自主达到飞行初速度后起飞,本发明提供了一种用于扑翼机器人实现飞行与奔跑动作切换的变胞机构,并在此基础上加以延时功能,使其更真实地模仿鸟类,以达到仿生效果。相较于传统的扑翼机器人,变胞扑翼机器人能够实现陆空作业状态的切换,弥补了高空作业的局限性,并且可以通过自主的奔跑动作来提供给自己起飞的初速度,增强了其人工智能性。除此以外,延时模块使得变胞扑翼机器人更具仿生效果。初步设想变胞机构如下图。
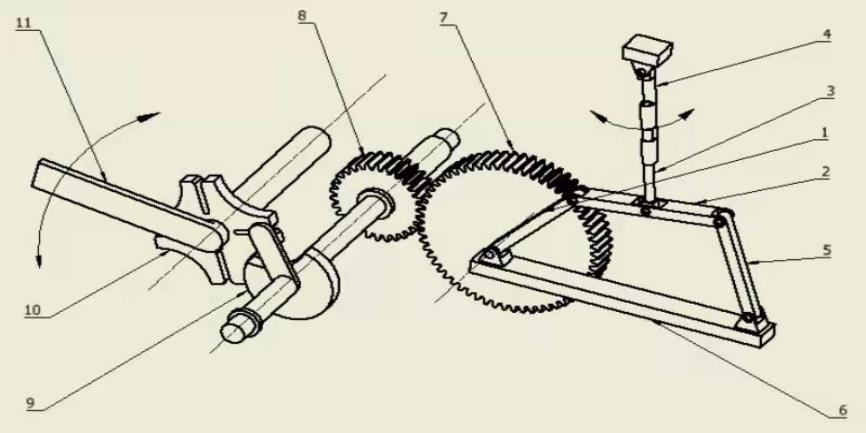
图4延时变胞机构的三维示意图
该延时变胞机构主要由模式切换模块、延时模块以及连接模块的传动齿轮三个模块组成。
模式切换模块是由杆1、杆2、杆3、杆4、杆5和外壳6的六杆机构组成。
延时模块由主动拨盘9和从动槽轮10组成
连接两模块的是一对啮合的大齿轮7和小齿轮8组成。
其中,从动槽轮10与仿生鸟腿部11固定在一根轴上,大齿轮7与第一根杆1固定在同一根轴上,小齿轮8与延时模块的主动拨盘9固定在同一根轴上,步进电机的输出轴与主动杆5相连。
当仿生鸟处于飞行状态时,模式切换模块的主动杆5在步进电机的控制下锁定,摇杆1处于右极限位置,仿生鸟腿部在延时模块的控制下处于收起状态。如图5所示。
仿生鸟开始由飞行状态切换为奔走状态时,步进电机反转,从而驱动主动杆5逆时针旋转。主动杆5带动摇杆1逆时针旋转,同时带动与摇杆1固结的大齿轮逆时针旋转。大齿轮带动与其啮合的小齿轮按顺时针旋转,并使得与小齿轮固结的主动拨盘顺时针旋转。当步进电机驱动主动杆5旋转一定的角度后,连杆3和连杆4间的限制体限制主动杆5的旋转,摇杆1到达左极限位置,此后步进电机锁定。在以上过程中,延时模块的从动槽轮逆时针旋转过一定角度,使得仿生鸟腿部被放下,仿生鸟开始实现奔走状态。如图6所示
当仿生鸟处于奔走状态时,步进电机锁定,模式切换模块的摇杆1处于左极限位置,机器人腿部在延时模块的控制下处于开放状态,并在电机的带动下实现奔跑动作。如图6所示。
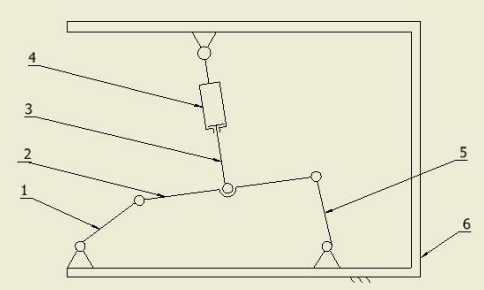
图5仿生鸟处于飞行状态时,腿部收起
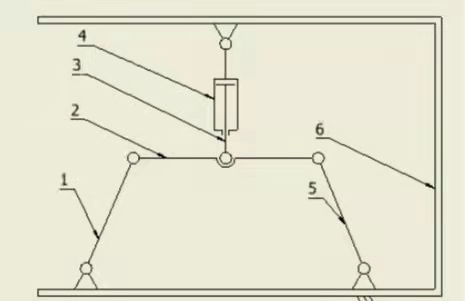
图6仿生鸟由飞行状态切换为奔跑状态时,腿部渐渐放下
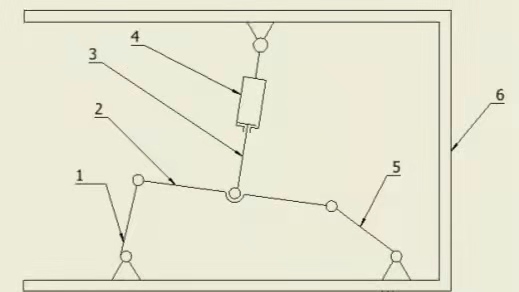
图7仿生鸟处于奔跑状态时,腿部下放
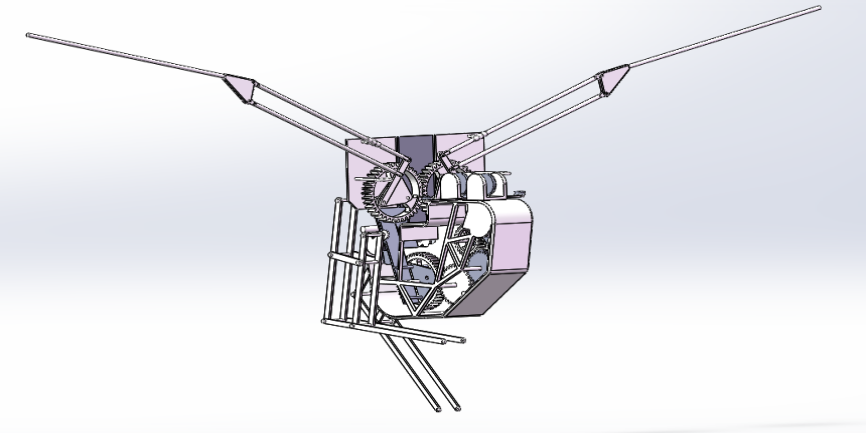
图8仿生鸟3D模型
变胞仿生飞行器体积小、质量轻,对于起降平台要求低,并且精致的变胞机翼有助于机械鸟在于狭小的地域顺利通行。同时,变胞机构使得仿生机械鸟更加灵活,对于飞行的地段有着良好的适应性,打破了以往飞机飞行范围的限制。变胞机构不仅可以应用于机翼处,还可运用于飞行器的起落机构。未来的变胞的仿生机械鸟对于传统的大型飞行机而言是一种创新,它的机身小,且外表与动作模仿鸟类,不易被敌方侦察机发现;在切换为地面奔跑模式时对于供能的要求远低于一般无人机空中的飞行要求,可大大降低能源消耗;变胞机构使得机身更加灵活,能够顺利通过狭小地段,到达人类无法通过的地方;独特的腿部变胞机构能够提高对于不同路况的适应性,使得应用范围不断扩大;同时实现陆空双栖的综合要求。符合新时期下人们对于飞行机的需求。
[1] 杨兰生.仿生机构学及其应用前景[J].哈尔滨理工大学学报,1989,13: 8-12.
[2] DAI J.S., REES J., Mobility in metamoiphic mechanisms of foldable/erectablekinds. [J].Transactions of ASME Journal of Mechanical Design, 1999 (03):375-382.
[3] 杨廷力.机器人机构拓扑结构学[M].北京:机械工业出版社,2004.
[4] 卢宏琴.基于旋量理论的机器人运动学和动力学研究及其应用[D].南京:南京航空航天大学机电学院,2007.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



