呼和浩特铁路局集宁机务段 内蒙古乌兰察布 012000
摘要:铁路运输以其速度快、运量大、能耗低、污染轻、安全性好等特点,成为各国现代运输体系中最重要的运输方式。
关键词:电力机车;传动系统;矢量控制
一、低开关频率下的调制策略
对电力机车等大功率传动系统,通常受散热限制,其逆变器最大开关频率限制在几百赫兹以下,不超过1kHz。然而,电机的同步频率在很大范围内变化,导致整个速度范围内载波比变化范围大。为充分利用直流母线电压,电力机车牵引传动系统在弱磁场区以方波运行。这就要求必须研究低开关频率下的调制方法,以满足整个速度范围要求。
由于开关频率低,电流谐波不可避免地会增大,造成不利影响。因此,在进入方波前,必须在低载波区域采用优化的PWM,通常方法是特定次谐波消除PWM(SHEPWM),一般在载波比低于15时优化。大于15时,一方面低次谐波较低;另一方面若采用优化的PWM,由于角度数量的增加,复杂度将大幅增加。
二、基于多模式调制策略的矢量控制
1、系统控制策略。电机采用转矩控制,整个控制系统包括磁链控制器、电流控制器、磁链观测、相角控制器、磁链角度计算、调制算法等。
在小功率传动系统中,由于开关频率高,通常在整个速度范围内采用异步调制,并且调制周期等于控制周期。在多模式调制下,调制周期可变,这导致了固定控制周期及可变调制周期间的矛盾。事实上,在电压解耦矢量控制系统中,PWM作用只是将控制算法得到的电压指令转换成所需脉冲信号,其作用相对独立,因此,设计中可将两者分开设计,即采用固定控制周期,并根据需要对PWM进行优化。本文控制频率为5kHz。
由于控制算法及调制算法周期不同,当电机频率发生变化时,电压矢量指令的角度将与实际角度不一致。相角控制器能确保调制算法发送脉冲的基波相位与控制算法的电压矢量相位一致。若不一致,例如,电压指令相位超前实际相位,则相角控制器将增加输出电压频率,使实际电压相位跟随上指令值。
2、提高转矩控制精度。在矢量控制中,实现精确的转矩控制应满足以下条件:①电机电流能快速无净差跟随指令值变化;②精确的转子磁链控制,包括磁链的角度及幅值控制。基本上,所有提高矢量控制性能的措施都围绕这两方面展开。
1)磁链控制器。其是确保电机实际d轴磁链等于磁链参考值。事实上,从矢量控制下电机的转矩方程 能看出,转矩的精确控制需在解耦基础上实现转子磁链及q轴电流的精确控制,因此,必须要有磁链控制器,其目的是精确控制转子的d轴磁链。
能看出,转矩的精确控制需在解耦基础上实现转子磁链及q轴电流的精确控制,因此,必须要有磁链控制器,其目的是精确控制转子的d轴磁链。
为将磁链控制器加入控制中,先要观测磁链,本文采用电压、电流模型相结合、低速段电流模型和高速段电压模型方法进行磁链观测。此方法优点为:①电流模型能弥补低速时电压模型的不准确性。②高速段的电压模型不含转子电阻,但定子电阻测量相对容易,且Lr/Lm随不同运行条件变化不大,基本固定。③无需转速信息,对无速度传感器有很大的吸引力。
2)定向角度校正。矢量控制中实现转矩及磁链解耦控制的关键是精确的转子磁场定向,即转子磁链方向与d轴电流方向一致,q轴磁链为零。先要控制算法中使用的电机参数与实际参数完全一致,但由于电机温度和磁饱和等的影响,很难实现精确的磁场定向。
转子磁场不确定定向有两种可能,若计算的磁链角超前于实际磁链角,则实际磁链在q轴上会有一个负分量,反之则有一个正分量,因此,q轴磁链可用于校正定向角。利用q轴观测磁链,通过PI调节器获得转差频率校正量,从而实现磁链角度的校正。
此转差频率校正方法能有效地校正间接矢量控制系统在任何负载下由于转子电阻参数变化等因素引起的转差频率误差,从而保证转子磁场的准确定向。
三、方波工况下的转矩控制
对于电力机车等牵引传动系统,为充分利用直流母线电压,通常以高速进入方波运行。对于传统的矢量控制,电机磁链及转矩是通过调节电压幅值与相位来控制,进入方波状态后,系统失去了对电压幅值的控制,只有通过相位控制,磁链及转矩不能同时等于参考指令。因此,传统的矢量控制方案已无法使用。
由于电机在稳态下电压方程由两项组成,其中一项是定子电阻压降,在高速时可忽略不计。考虑到 ,所以电机电压主要部分为
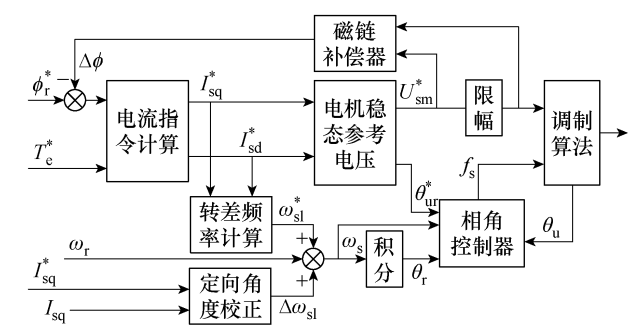
,所以电机电压主要部分为 ,通过调整参考磁链能显著改变电机电压。基于此原理,控制方案如图1所示。图中最重要部分是磁链补偿器。由于电压无法调节,控制中取消了电流环及磁链控制环,直接通过电流指令计算电机参考电压,若电压超过方波条件下可提供的最大电压,则通过磁链补偿器降低励磁电流以降低电压。d轴电流变化引起的转矩变化可通过调节q轴电流进行。
,通过调整参考磁链能显著改变电机电压。基于此原理,控制方案如图1所示。图中最重要部分是磁链补偿器。由于电压无法调节,控制中取消了电流环及磁链控制环,直接通过电流指令计算电机参考电压,若电压超过方波条件下可提供的最大电压,则通过磁链补偿器降低励磁电流以降低电压。d轴电流变化引起的转矩变化可通过调节q轴电流进行。
图1 方波工况下的控制方案
仿真及实验结果
1、仿真结果。模拟中使用与实际实验电机相同的参数,电机采用转矩控制,所有控制算法均采用m语言编程实现,最大限度地接近实际控制算法。
在电机转速变化中,不同调制方式间的切换平稳,无电流冲击。将传统间接矢量控制与多模式调制策略相结合,并采用上述各种控制、补偿策略,在转速300r/min异步调制、900r/min同步调制、1200R/min优化PWM时进行转矩突增(0/10~30N·m)或突减(30~10N·m),由此得出:即使开关频率低,转矩阶跃响应在稳态精度和动态响应速度方面都较理想。随着脉冲数的减少,动态响应速度有一定程度的降低,这是不可避免的。通过磁链控制器及定向角矫正器的作用,电机转子d轴磁链观测值与稳态值基本一致,q轴磁链基本为零,保证了磁链幅值及定向角的准确性,从而保证了准确的转矩输出。
当转速为900r/min,电机负载为30N·m稳态时,突然将控制算法中使用的转子电阻值改为 =1.5Rr,以模拟运行中电机参数的变化情况。从仿真结果可看出,当转子电阻发生突变时,电机输出转矩及观测到的d、q轴磁链都会产生误差。通过磁链控制和定向角校正,d、q轴磁链迅速恢复到正常值,转矩输出也恢复到30N·m给定值,电机电流稳定,无波动或振荡现象。
=1.5Rr,以模拟运行中电机参数的变化情况。从仿真结果可看出,当转子电阻发生突变时,电机输出转矩及观测到的d、q轴磁链都会产生误差。通过磁链控制和定向角校正,d、q轴磁链迅速恢复到正常值,转矩输出也恢复到30N·m给定值,电机电流稳定,无波动或振荡现象。
2、实验结果。在上述分析及仿真结果基础上,通过交流传动试验台对控制算法进行进一步验证。试验电机进行扭矩控制,测功机用于控制陪试电机转速,并观测转矩输出。控制系统基于TMS320F28335数字信号处理器。调制方式及控制方法与仿真完全相同。电机给定磁链为0.99Wb,记录不同工作点数据。
实验中采用红外测温仪测量电机外壳温度,试验前后,电机外壳温度从20℃上升到50℃以上。不同调制方式下,电机转矩输出精度在大多数工况下保持在±5%以内,低速时,转矩输出较小,可通过适当增加励磁电流来改善。事实上,对于牵引传动系统电机,励磁电流在恒转矩区并不保持恒定不变,通常起动时较中,电机处于一定过励磁状态,以确保转矩输出。随着转速的增加,励磁将在一定程度上减小。
在50Hz方波条件下,电机负载从5N·m突变到15N·m,可见,即使在方波条件下,仍能保持快速的转矩响应速度。在动态过程中,转矩控制平稳,无传统VVVF控制下动态过程中转矩的振荡过程。
参考文献:
[1]周明磊.电力机车牵引传动系统矢量控制[J].电工技术学报,2016(09).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号