广州市城市规划勘测设计研究 广东 广州 510000
摘要:为解决无人机实景三维建模在大高差山区出现分辨率不足、重叠度不够、模型空洞、建筑物拉花的现象,采用无人机仿地飞行的方法,再基于Context Capture进行内业建模,利用外业RTK实测点检查实景三维模型的平面、高程精度,结果表明精度满足规范要求。
关键词:大高差山区;实景三维建模;无人机仿地飞行
随着西部开发的进一步推进,近些年在西部大量兴修或规划水利、高速公路、高速铁路等超级工程,如红旗河西部调水工程、雅叶高速、川藏高铁等。与东部地区工程相比,上述超级工程地理地质条件复杂,气候严峻,对工程的勘察设计工作带来了严峻的挑战。
随着航空摄影及BIM技术的发展,实景三维模型应运而生,已经成为工程勘察设计阶段的主要角色,为虚拟踏勘、内业调查、方案论证、展示汇报提供逼真的地理环境,同时为房屋征拆迁调查提供了一种便捷、高效的新方法。
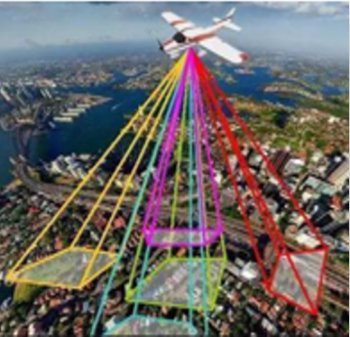
实景三维模型常见的数据采集方式为有人机(直升机、运输机)、无人机两种方式。在大高差山区中,测区分布零散、天气多变,多采用无人机进行数据采集。目前,无人机数据采集方法主要为定高飞行,即飞行器在飞行过程中保持航高不变。但在大高差山区,地面起伏较大,无人机相对地面的高度差异较大,这样会导致低处分辨率不足,高处重叠度不够,会造成模型空洞、建筑物拉花的现象。为避免大高差现象产生的上述问题,通常将测区划分为若干小测区,单独作业,但这做法也会有一定问题,其数据的外业采集效率会大大降低。因此,传统定高飞行的方法需要改善,本文采用了一种无人机仿地飞行的方法。
基于无人机航测的实景三维模型建立的主要环节是测区资料收集、数据采集、数据预处理、倾斜建模、质量检查,这些环节包含了工作准备、项目开展和结果检查等内容。本文主要对数据采集过程进行了改善,基于无人机仿地飞行方法的数据采集由以下几个环节构成:航线规划、像控点测量、数字表面模型DSM获取、无人机航飞、数据整理。以下重点介绍航线规划和数字表面模型(DSM)获取2.1航线规划
影响无人机倾斜摄影航线规划主要控制因素是影像分辨率和旁向重叠度,
影像分辨率计算公式如下:

H为相对航高、f为航摄相机的焦距、GSD为影像的地面分辨率 ,a为像元尺寸大小。
由上式可以发现,影像的地面分辨率GSD与航高H成正比。在大高差山区当采用传统定高飞行时,由于地面起伏就大,位于低处的区域,相对航高较大,影像的地面分辨率下降,但当采用仿地飞行方法时,无人机依照地表起伏改变航高,保持相对航高不变,以实现整个测区分辨保持一致。
旁向重叠度为旁向相邻的两张影片的重叠度px%,计算公式如下:


其中,p为相邻相片的重复宽度,len为影像在地面的实际宽度,d为像幅的宽度。当相机的焦距、像幅大小一定是,想提高作业效率,就必须增大航线间距,若要保持旁向重叠度满足要求,则必须增加航高。
综合上述因素可以得出,在实际飞行过程中,若想提高航飞效率,必须在满足分辨率的前提下尽可能地提高航飞高度。
2.2数字表面模型(DSM)获取
无人机仿地飞行的前提是获取地表起伏情况,有两种途径可以获取。
1、通过开源渠道下载。目前覆盖全国的公开DEM有空间分辨率为90m、30m、12.5m的可供下载,利用DEM获取地表起伏情况,
2、在测区内采用2D正射影像的航飞方法,通过设置较大的分辨率和较小的重叠度,快速获取区域内低分辨的粗略数字高程模型(DEM),来替代数字表面模型(DSM),获取地表起伏情况。
在湖北恩施大峡谷进行实验,测区面积2平方千米,测区内最大高差为700m,利用M600 pro多旋翼无人机搭载睿博DG3 pro相机,分别使用传统分段式定高飞行方法和仿地飞行方法进行航飞,对比两个方法的数据采集效率。
传统分段式定高飞行,满足分辨率0.05m,航向重叠度80~75%、山顶不低于65%,旁向重叠度70~65%、山顶不低于45%,计算得到航线间距为57.6m,区域内航线总航程为24km左右,需要设置3个飞行架次。设计航线如图3-1所示。
仿地飞行,满足分辨率0.05m,航向重叠度80~75%、山顶不低于65%,旁向重叠度70~65%、山顶不低于45%,计算得到航线间距是105m,区域内航线总航程为14km左右,需要设置2个飞行架次。设计航线如图3-2所示。
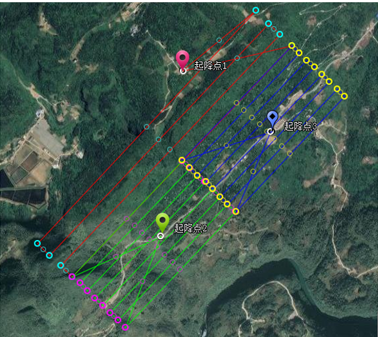

图3-1 图3-2
如表3-1所示,统计两个方法的架次数,航程,采集时间如表所示,相对传统飞行而言,仿地飞行的飞行架次减少,数据采集时间大大减少。
表3-1 传统定高飞行与仿地飞行数据对比
方法 | 架次 | 航程 | 数据采集耗时 | 航飞效率(km²/天) |
传统定高飞行 | 3 | 24km | 2.4h | 5.5 |
仿地飞行 | 2 | 14km | 1.4h | 8.3 |
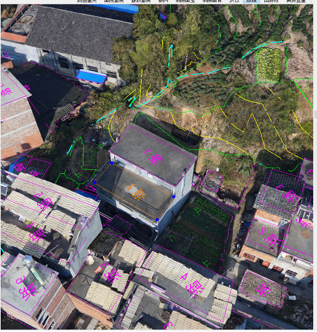
基于外业RTK实测点,对仿地飞行方法得到的实景三维模型进行精度检查,分别检查平面精度和高程精度,


平面检查点


高程检查点
统计结果如表3-2所示:
表3-2平面、高程精度统计表
精度指标 | 最大误差 | 平均误差 | 中误差 |
平面 | 0.209 | 0.138 | 0.115 |
高程 | 0.197 | 0.042 | 0.04 |
采用无人机仿地飞行的方法有效地解决了大高差山区实景三维建模效率低的难题 ,模型平面、高程精度均满足规范要求。使用高分辨率、高精度的实景三维模型加快了大高差山区工程建设速度,推动无人机技术在工程勘察设计领域的应用。
[1]王站,杨铭伟.无像控点仿地飞行在低空摄影中的应用[J].工程建设与设计,2021(02):144-145.
[2]辛赟.无人机仿地飞行在铜川地区某石灰岩矿区测图中的应用[J].中国非金属矿工业导刊,2020(03):53-56.
[3]赖斌.大疆精灵4 RTK仿地飞行在大高差地形测量中的应用[J].中国水运.航道科技,2020(02):59-63.
[4]张强.仿地飞行在无人机倾斜摄影测量中的应用[J].科技创新与应用,2020(07):179-180.
[5]冯威.高寒高海拔复杂艰险山区无人机勘察技术应用[J].铁道工程学报,2019,36(08):9-13.
[6]吴开华,孙学超,张竞成,陈丰农.基于高度融合的植保无人机仿地飞行方法研究[J].农业机械学报,2018,49(06):17-23.
[7]孙学超. 基于毫米波雷达的植保无人机仿地飞行技术研究[D].杭州电子科技大学,2018.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



