福建农林大学 350108
随着柔性交流输电技术的发展,单一静止同步串联补偿器(SSSC)已经无法满足电力系统运行要求。电网中的多个SSSC协调可以为电力系统带来巨大的经济效益,因此,探究多个SSSC之间的协调控制方案的问题,对于智能电网的建设具有重大而深远的意义。
本文首先通详细阐释了静止同步串联补偿器的基本原理及交互影响的概念,然后,利用Matlab/Simulink仿真软件来搭建系统模型,并从功率及系统振荡波形方面的改善来验证理论的结果。
关键词:柔性交流输电;静止同步串联补偿器;协调控制;优化设计
0 引言
传统交流输电系统中采用串联电容补偿的措施来提高电网输送能力,控制功率分配并提高电力系统暂态稳定性,但可能会对电力系统和汽轮发电机造成一定损坏。目前电力电子技术飞速发展,柔性交流输电(FACTS)系统越来越广泛地应用于我国电网的建设当中,其中晶闸管控制电容器和静止同步串联补偿器是FACTS装置中的重要成员[1]。
当FACTS串联装置安装于线路后,它们之间由于缺乏协调和配合,可能会对传统继电保护的性能产生巨大的影响。因此,为保证电网的安全稳定运行,深入地分析和研究多个串联型FACTS元件对系统产生的影响具有重要的价值和意义[2]。将FACTS技术应用于智能电网中,可以通过对系统关键参数的快速、精确、连续的控制,可以改善传统交流输电系统,使其更加具有灵活性,实现功率的合理分配,大大提高电力系统运行的经济性与可靠性。
静止同步串联补偿器(SSSC)是基于同步电压源的串联补偿器,SSSC核心组成为一个带有直流电源的电压源逆变器,通过控制电力电子开关的导通与关断可以将直流电压转换成电网同频率三相交流注入电压,因此可以改变被串联的线路潮流进而改变系统潮流分布。其余由滤波器,串联耦合变压器,旁路开关SCR,控制器及驱动电路组成。SSSC由变换器产生的幅值,相位可调三相正弦同步电压经过耦合变压器串联于线路上这种阻抗补偿方式,是基于同步电压源的原理,因此不会和线路其它的电抗产生串联谐振。
在一个多变量的控制系统中,对于一个控制器的设计而言,必须研究其输入信号与输出信号之间的交互影响。对于SSSC其主控制器与辅助控制器的输入信号可能受多个输出信号的影响,同样控制器的输出信号也会受多个输入信号的影响。根据交互影响的定义:在一个多变量系统中,交互是指在传输中某个操作输入变量影响一系列测量输出变量,或者是某个输出被许多输入所影响。如果交互影响增强了控制效果,称这种交互影响为正交互;如果交互影响减弱了控制效果或使系统不稳定,则称这种交互影响是负交互。在控制器设计和稳定分析中,通常主要关心的是控制器之间可能存在的负交互影响。
理论上来说,解决FACTS装置控制器间存在负交互影响最有效的方法是利用多变量协调控制方法,因为一个存在多个控制功能的柔性交流输电系统形成的是一个多输入/输出的系统,所以,设计能够同一时间完成多控制功能的多输入输出控制器,是克服控制器间存在的负交互影响同时保证系统闭环稳定性理论上最简单的方法。但是,由于多变量控制方法有较大的复杂性,所以在电力系统中是难以实现的,通常来说解决FACTS装置控制器之间交互影响问题的方法就是协调控制。
为了更加贴近SSSC的实际工程应用情况,利用MATLAB/simulink仿真软件建立了双电源的高电压、长距离、大容量的输电线路模型(如图3-1所示)。在两条不同的输电线路上分别安装一个SSSC模块并都附加阻尼功率控制器,来起到稳定母线电压,控制线路输送的功率的作用。
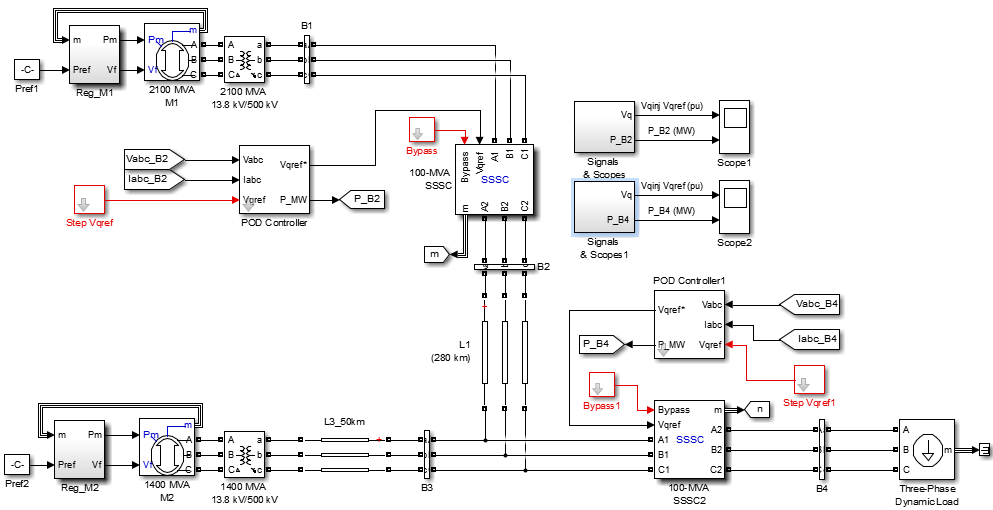 图2-1多个SSSC仿真系统模型
图2-1多个SSSC仿真系统模型
(一)电压控制的多SSSC交互影响验证
仿真系统如图2-1所示,仿真时间设置为20s,POD阻尼功率振荡控制器设置为关断,SSSC1的电压控制参考值Vqref=0.1,控制时间为0.5s,投入时间为0.2s。SSSC2的电压控制参考=-0.08,控制时间为10s,即只投入SSSC1时的母线电压波形和母线功率波形如图2-2所示:
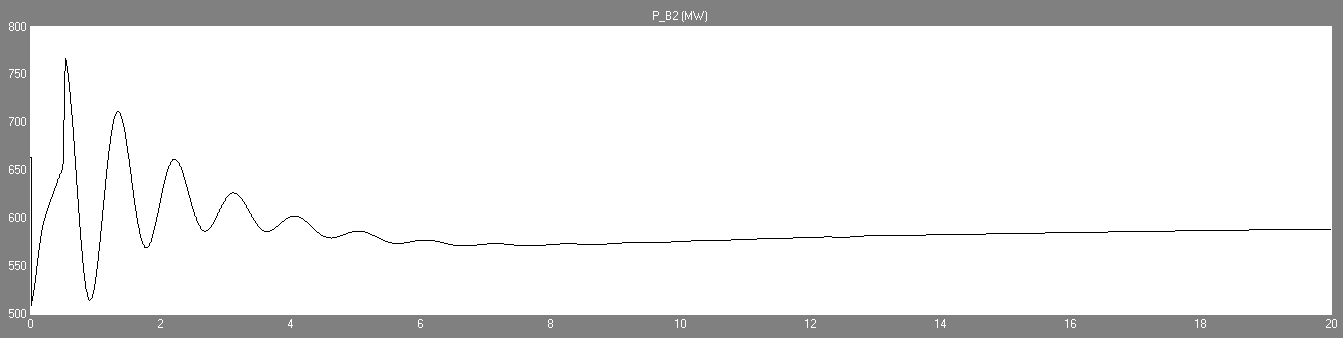
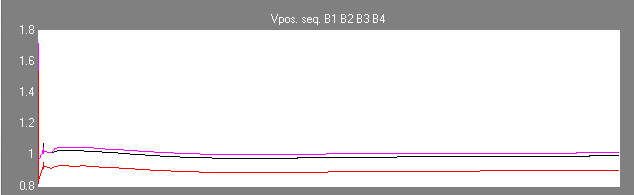
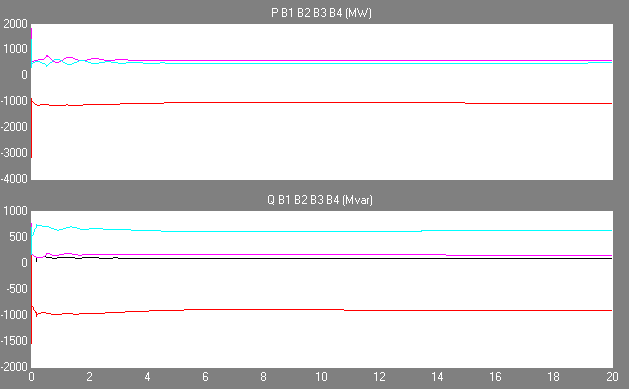
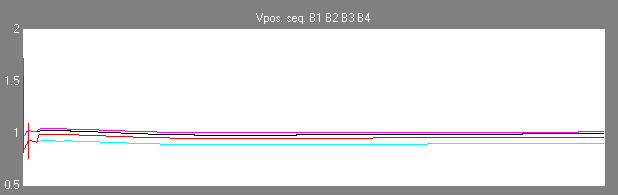
(1)投入sssc1的功率波形 (2)母线电压波形 (3)母线有功和无功功率波形
图2-2
可见当前状态下,要控制系统功率,SSSC1输入相应的控制电压信号,功率会产生±200MW左右的振荡,并且随着时间振荡会逐步衰减,在4.5s左右达到稳态,并且照线路原有功率基础上增加传输功率100MW。在静止同步串联补偿器投入瞬间相邻母线电压振荡,后逐渐达到稳定,但稳定后的波形非对称的正弦波,含有高次谐波的干扰。
设置SSSC2的投入时间为0.2s,控制电压在t=5s时=-0.08.此时SSSC1与SSSC2全部投入运行,仿真波形为:
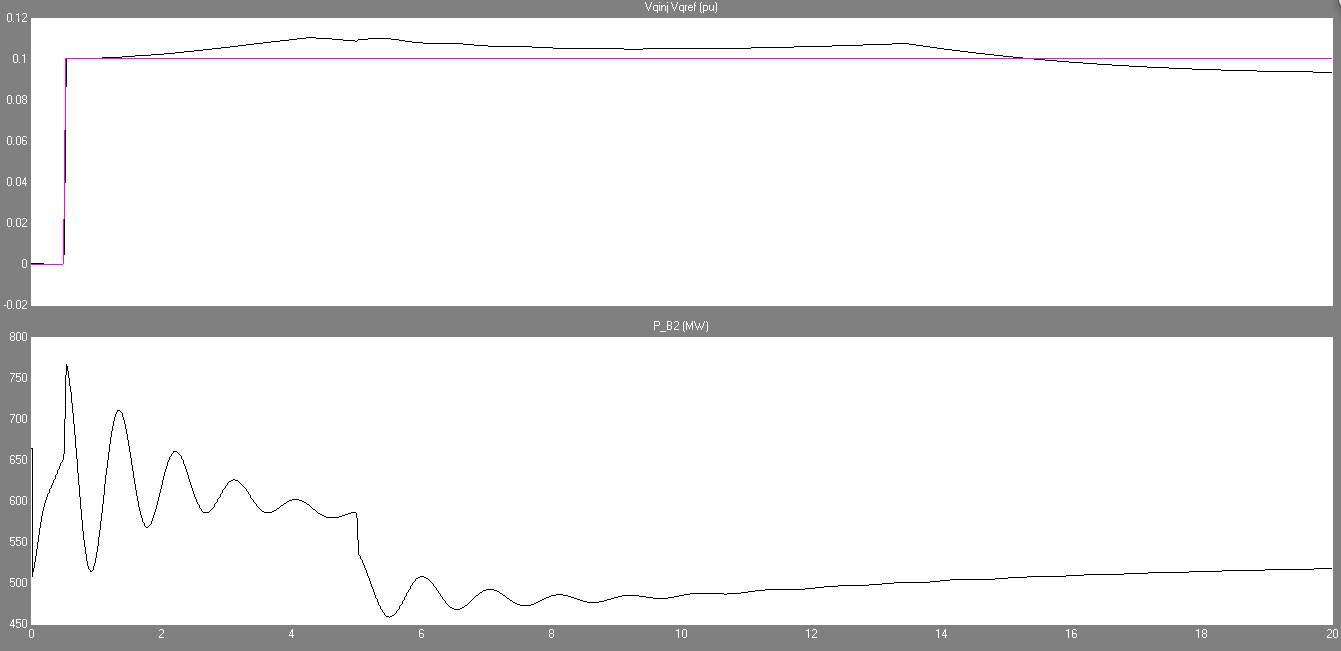
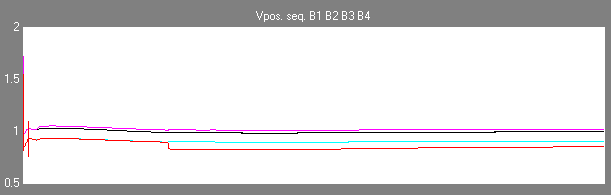
(1)投入SSSC1和SSSC2的母线功率波形 (2)母线电压波形
图2-3投入两个SSSC的仿真系统波形
根据图2-3的波形,可以发现母线的功率发生了幅值为±280MW左右的振荡,振幅大于只投入一个SSSC1的情况,并且在t=6s时仍旧没有达到完全稳定的情况,验证了系统中存在多个SSSC时会发生交互影响。
(二)多个SSSC的协调控制优化
根据图2-2和2-3的对比可以发现,当SSSC2的电压控制参考值在6s时发生改变,会与SSSC1的控制回路产生交互影响,但这种交互影响的作用不大,只是略微增大了系统振荡以及到达稳定所需要的时间。
下面将SSSC1与SSSC2同时投入,控制电压参考值均设置为0.1,时间相同,仿真出的系统波形如图2-4所示:
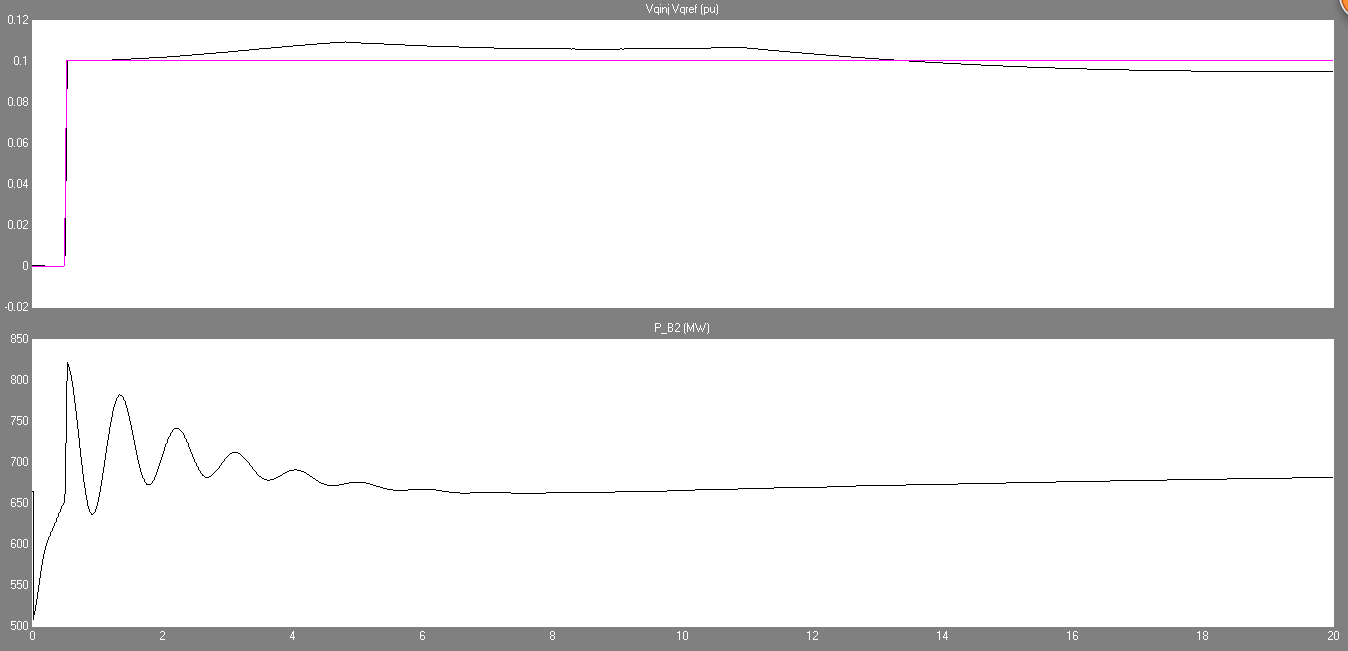
(1)投入SSSC1和SSSC2的母线功率波形 (2)母线电压波形
图2-4
通过图可知,当两个SSSC的控制电压参考值同时改变以调整线路参数时,系统功率振荡会达到±350MW,高于图3-3的振荡情况。这种控制方式下调节系统的潮流很容易使得线路上流过较大的功率,远超出线路本身所能承载的功率极限,同时有可能会造成系统发生大扰动,造成发电机转子间的发生摆动,系统阻尼不足时甚至会导致系统失去稳定性甚至解列,破坏电力系统的稳定性。
综合比较这一节的波形以及仿真结果,可以得出结论:
(1)多个SSSC的系统,其控制回路之间会产生交互影响,根据波形可以看出它们的实际注入电压标幺值要偏离参考控制电压,造成他们之间无法协调,造成系统发生功率振荡,对输电线路而言会增加其电动力,造成线路的老化程度加快,严重时甚至导致系统失去稳定性。
(2)多个SSSC的协调控制优化,可以通过控制其电压控制回路的投入时间,使不同的SSSC电压控制回路之间具有一定的时间差,一方面可以削弱母线功率振荡,减小其振荡幅值,防止越限;另一方面可以使SSSC的补偿线路功率能够较快到达平稳状态,增加系统的稳定性和鲁棒性。
(三)附加功率阻尼振荡控制器的SSSC
根据上一节的仿真波形结果,可以看出当多个SSSC协调控制时,可能系统会发生较为严重的功率振荡,而削弱这种振荡的方法之一就是附加功率阻尼振荡控制器,对SSSC进行控制方面的优化。
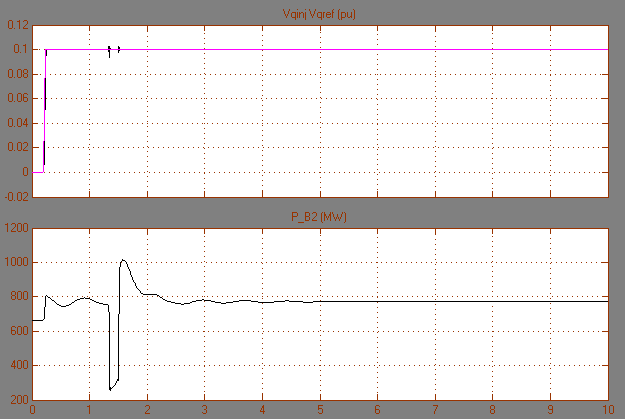
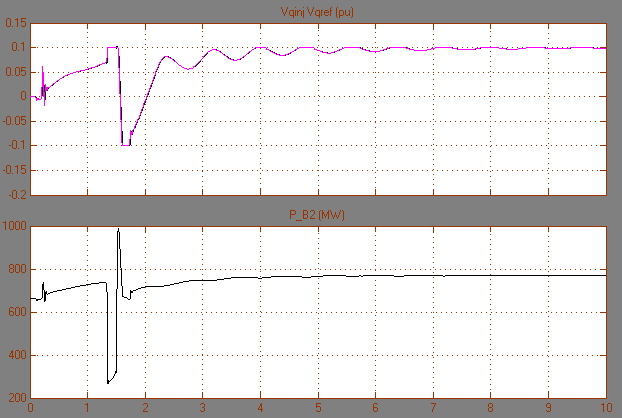
图3-5三相短路时不带POD控制器的功率波形 图2-6三相故障情况下带有POD控制器的SSSC系统 功率波形
将图2-5与图2-6进行对比,可以发现,投入了POD控制器后,系统的功率振荡明显衰减,说明在系统发生故障时,带有POD控制器的SSSC可以有效抑制系统的阻尼功率振荡,起到系统提供±阻尼力矩的作用,提高了系统的鲁棒性。
多个静止同步串联补偿器的存在交互影响,在本文中,首先以第二章的原理部分阐释和第三章的协调控制模型分析,搭建了以MATLAB/simulink仿真环境下的含有多个SSSC的系统仿真模型,然后以此模型为基础,通过改变相应的控制参数,以及附加阻尼功率振荡控制器的投退分析,得到了相应仿真系统的波形,并通过控制其电压回路的参数,实现了多个SSSC协调控制的优化。考虑到当前电网广泛互联的情况下,相邻系统或自身内部发生扰动时,内部或是联络线路发生功率振荡,设计了附加阻尼功率振荡控制器的SSSC,并与未加控制器的SSSC进行仿真对比,得出系统故障情况下,附加POD控制器的SSSC对系统稳定性的提升。
[1]张帆,徐政.静止同步串联补偿器控制方式及特性研究[J].中国电机工程学报,2008,28(19):75-80.
[2]蒋晨阳;刘青;梁宵;李冬梅;两个串补元件对电力系统影响的探究[J].华北电力技术,2016(1):24-29.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号