天津职业技术师范大学 天津市津南区 300222
摘要:“垃圾桶”作为人类生活中不可或缺的必需品,它伴随着人类走过了每一个时代。但是现在我们处在一个急速发展的时代,资源的快速消耗、人力物力的巨额投入所带来的是垃圾种类及数量与日俱增。普通的垃圾桶已经无法满足日常分类需求,所以现在急需一款集智能化、一体化、便利性于一体的垃圾桶,用于分拣垃圾,减轻人工分拣的负担,提高资源的利用率,促进经济可持续发展。
关键词:AI视觉技术;自动化;环境保护
0、引言
随着经济的快速发展,为促进循环经济的发展,提高资源利用效率,保护和改善环境,实现可持续发展,在这大前提下,垃圾分类就是一个迫在眉睫的问题,一般情况下垃圾分类大多靠的是人为分拣垃圾,一方面大大浪费劳动力另一方面也有不确定危险性,于是提出并设计了一款可自动识别垃圾种类、自动分类和检满的智能分类垃圾桶。本文设计项目基于AI视觉来实现垃圾类别的判别,stm32芯片作为主控,并搭建相关机械结构从而实现一体化和自动化。
1、系统总体构成
本设计采用STM32F103ZET6,此芯片采用高性能的ARM Cortex-M3内核,芯片的工作频率可以达到72MHZ,拥有着同系列芯片中最多的资源,本系统用到了该芯片的串口、定时器、外部中断等。系统的整体构成分为两层,第一层包括垃圾整理区域、垃圾投放区域和主控电路区域,第二层为四个可旋转调整位置的垃圾桶。并且配备红外对管传感器,以便于检测垃圾桶的满载情况。整体系统控制框图如下图1所示:

图1 整体系统控制框图
2、机械部分设计
机械结构通过型材搭建基本外部框架,可以大致分为上下两层,其整体结构图如下图2所示。上层的结构为对垃圾进行分类的工作区,其中上半部分有传送带、电路放置区域和垃圾识别区域,传送带负责运输垃圾到垃圾识别区域,垃圾识别区域下方为一个挡板由舵机配合的齿轮组作为运动机构,当垃圾在垃圾识别区域识别完成后即可以控制舵机打开挡板使垃圾掉落,其三维图如下图3所示。下层的主要结构为齿轮组和代表四种垃圾的四个垃圾桶,当主控收到所识别垃圾的种类后即控制下方步进电机带动齿轮组进行运转,使对应的垃圾桶到垃圾识别区域的下方,以达到当仓门打开后垃圾可以掉入的操作,下方运动机构的三维图如下图4所示:
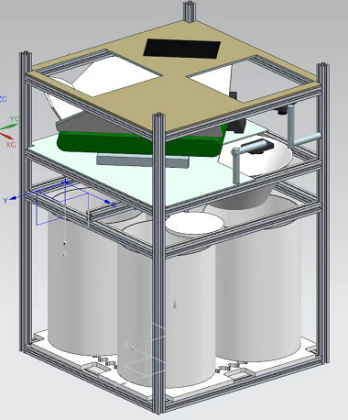


图2 图3 图4
3、软件设计 ![]()
在整个系统的软件程序编写中总共分为两部分,一部分是主控部分STM32芯片的编程,作为整个系统的主控不仅需要接收各个传感器的返回信号,还需要对信号做出相应判断从而控制电机和舵机等执行机构做出相应的动作去控制机械机构从而达到预期的各种目的;另一部分是在视觉识别部分的程序编写,也是整个系统中非常重要的一环,通过识别投入垃圾的类别从而依据特定协议去返回到主控固定的信号使主控芯片做出对应的正确的判断。![]()
![]()
![]()
视觉部分作为整个系统的重中之重可以说是整个系统的核心部分,若要系统正常运行需要满足以下几点:首先是要其满足检测到物品并发出信号以达到当垃圾分类仓进入物品的时候可以瞬间停止,其次要满足对各类垃圾的准确识别,以满足整个系统的分类需要。在满足上述两个需求的条件下,前提是需要对使用模型进行制作,首先制作数据集,通过每种垃圾的各个姿态的图片进行采样,待整理好数据集后使用tenserflow去训练整个数据集以得到一个可以使用的模型,在程序中首先要对模型进行调用,然后在视觉模块的使用中需要对视觉模块所看到的图像进行不断地截图并对比模型看其相似度是否能达到90%,如果需要一个迅速的判断则要求视觉模块有很高的刷新帧率并且使其在程序中不能有卡程序的情况,使其可以一直进行检测。
4、系统测试
系统完成搭建之后就开始准备测试,在初步测试中发现由于外界光照强度的不同使识别成功率大大降低,于是决定在垃圾识别区域旁边添加补光灯来使区域周边的光强时刻在一个稳定的范围后,重新制作数据集进行测试,选择录入的垃圾种类有水果、蔬菜、易拉罐、矿泉水瓶、砖块、瓦片、烟头、电池等。在录入完成后对系统进行测试,依次将土豆、西红柿、香蕉、苹果、萝卜、青椒、橘子、水瓶、易拉罐、砖块、瓦片、烟头、电池投入并记录识别率、分类和显示的结果。
经过测试之后发现整个系统结构中的垃圾识别区域存在问题,在投放微小物体比如烟头或者电池时会发生无法识别到的情况,所以对垃圾识别区域进行了缩小,改良了区域空间使摄像头可以全方位覆盖。最后经过了多次测试后率基本到达百分之九十以上。并且运行速度也是达到几秒分类一个垃圾,安全性也有保障,不存在安全隐患,实用性比较高。
5、应用前景及未来展望
智能分类垃圾桶,从生活垃圾的源头提高垃圾分类率,改善了人类对环境维护的新认知,改进了生活中各种垃圾的分类工作方式。削弱了对垃圾分类的人工成本,最大程度地利用了技术发展对于生活智能化推进后,优化的效果与生活中最实际日常环节的应用。有效、可靠、简单、可行、准确度、舒适度等多方面合一,带来行为动作的新体验。
结合目前垃圾分类的发展潮流,“垃圾桶”作为人类生活中不可或缺的必需品,它伴随着人类走过了每一个时代。尤其是在当今的居家用品、酒店用品市场更是必不可少。随着人们环保意识和审美水平的普遍提高,垃圾桶的种类和数量也在不断翻新和增加,人们更加注重它的美观和实用性,而产品也朝着"小巧”和"智能化”方向发展。智能垃圾桶上市以来,就获得消费者的欢迎,因市场需求大,投资小,也备受中小投资者的青睐。在加入了语音识别之后,也变得更加的实用便捷。
6、结束语
通过本文的探讨,不难发现利用智能分类垃圾桶未来必将成为垃圾分类政策下的“幸运儿”,而作为垃圾桶,在分类正确前提下也应该具有高效性,这样才能真正对接这个时代,后续会继续对这方面进行探索,继续去解决下一个难题。
参考文献
[1]谭浩强.C语言程序设计(第三版).清华大学出版社,2005.
[2]熊建桥, 陆卫, 季小涵,等. 一种智能分类垃圾桶系统的设计[J]. 机电产品开发与创新, 2016(5).
[3]陈子恒, 周志成, 王梦帅. 智能分类垃圾桶的设计与实现[J]. 机电信息, 2017(9):100-101.
[4]魏子瑄, 刘小刚, 陈真贵,等. 基于语音识别技术的智能分类垃圾桶[J]. 单片机与嵌入式系统应用, 2020.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



