上海鼎泰匠芯科技有限公司 200120
摘要:随着过程工业日益走向大规模、复杂化,对生产过程的控制品质要求越来越高,出现了许多过程、结构、环境和控制均十分复杂的生产系统,出现了先进过程控制APC(亦称高等过程控制)的概念。习惯上将那些不同于常规单回路PID控制,并具有比常规PID控制更好控制效果的控制策略统称为先进过程控制,如自适应控制、预测控制、专家控制、模糊控制、神经网络控制、推理控制等都属于先进控制。APC通常需要计算机化的、近乎实时的过程控制。这些基本控制系统通常手动操作,以根据温度、压力或传入反馈等不断变化的条件调整所需的目标值(称为“设定点”)。然而,细致入微的高级过程控制(APC)系统通常通过自动化响应来显着提高性能——类似于汽车上的巡航控制如何调节速度并最大限度地提高燃油效率。基于先进制程控制上的需求,本文研究了大整数和浮点数的快速平方根函数。结果表明该算法使用各种新的和现有的想法来计算平方根,比其他算法具有更高的效率和更好的性能。
关键词:先进制程控制;快速大数平方根函数;PID 算法
引言
随着12寸晶圆在全世界的发展,半导体生产规模不断地扩大,制造工艺不断复杂、芯片的集成度也越来越高,如何提高产品的良率(Yield)变成一个相当重要的问题。
常见的方法包括统计过程控制(SPC),神经网络的使用(尤其是在高维问题中)以及先进过程控制(APC)。APC的基本目标是双重的:获得更接近过程的过程控制措施,并使控制动作自动化。要使 APC 能够更高效地运行,需要将常规调谐和解决传感器、设备和控制回路问题的全面方法相结合。随着计算能力(和计算成本的降低)的最新进展,可以使用机器学习模型对APC进行调优,而高级分析可以从大量历史数据中产生响应式见解,从而提高调优过程的速度并减少人为偏见或干预。
大数快速平方根在先进过程控制的位置控制方法,定位过程的控制分三个阶段,第一阶段:当位置误差大于减速点时,APC控制器控制传动系统按最大速度运行;第二阶段:当位置误差大于死区并且小于减速点时,APC控制器控制传动系统按平方根曲线进行减速;第三阶段:当位置误差小于死区,APC控制器控制传动系统完成抱闸动作,使被控对象停止在定位误差允许的范围内,所述APC控制器上并列比例积分控制器,所述比例积分控制器在第二阶段和第三阶段进行补充控制。在上述处理中采用大整数和浮点数的快速平方根函数。
解决制程过程中各项参数和性能指标漂移的问题,及时纠正误差。它的实施有助于提高生产率、降低能耗、改善产品质量和连续性,以及改善制程的安全性等,使得制程设备能够实现更加严格的工艺窗口,满足未来先进制程结点或以下制程技术的要求。
在工业一样,先进过程控制(APC)主要是指多变量控制。多变量控制意味着一致调整多个单回路控制器,以满足一组附加相关过程变量的约束控制和优化目标。
多变量控制是几乎所有工业过程操作的核心方面。从历史上看,调整单回路控制器设定点和输出以控制约束和优化变量(即“受控变量”)的超集。他们根据经验、过程知识、持续的操作条件以及来自更大运营团队(包括监督、过程工程师和生产计划)的投入来做到这一点。APC努力实现这项任务的自动化,以便在容量、效率、质量等方面获得增量收益。图1描述了手动和自动多变量控制之间的本质区别。
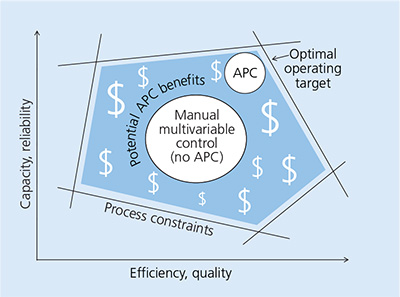
图1 手动与自动多变量控制
工业自动化的多变量控制可以捕获增量收益,通过手动多变量控制,现场人员倾向于使过程远离约束,并且移动频率降低,通常会在容量,产量,能量或质量方面产生相关的损失。在工业自动化中一样,先进过程控制的平方根通常是隐式编写的,显式公式仅在对称情况下可用。统计学中经常需要计算它,即使是不对称矩阵;例如,在分析多元ARCH模型时;
vech(∑t)=δ+Γvech(yt−1y’t−1)
式中,∑t表示条件方差,E(yt | yt−1) =0,平方Γ不必是对称的。
因此,对平方根函数有一个通用的显式公式是很有意义的。计划如下:首先,将平方根视为R0,+ → R0,+上定义的单值函数,非负实数。这是函数最常见的用法(“主体”)(复数分析语言中的“值”),将其直接推广到半正定矩阵。然后,在(1)—(4),中给出了对一般平方矩阵的相应扩展,后者是第一次显式地得到。其次是矩阵的平方根函数存在的条件。使用Abadir和Magnus(2005)中提出的符号约定。
目前最常用的自动化多变量控制技术需要更高效的算法。该算法使用各种新的和现有的想法来计算平方根,比其他算法具有更高的效率和更好的性能。
该算法由一个核心整数平方根函数和一个超大浮点数的类组成。
整数版本 ——此函数向下舍入到最接近的整数(floor)。
超大浮点数——整数版本的类型,可添加浮点和可选精度。
整数平方根函数已经过各种测试类型和基准测试的测试。
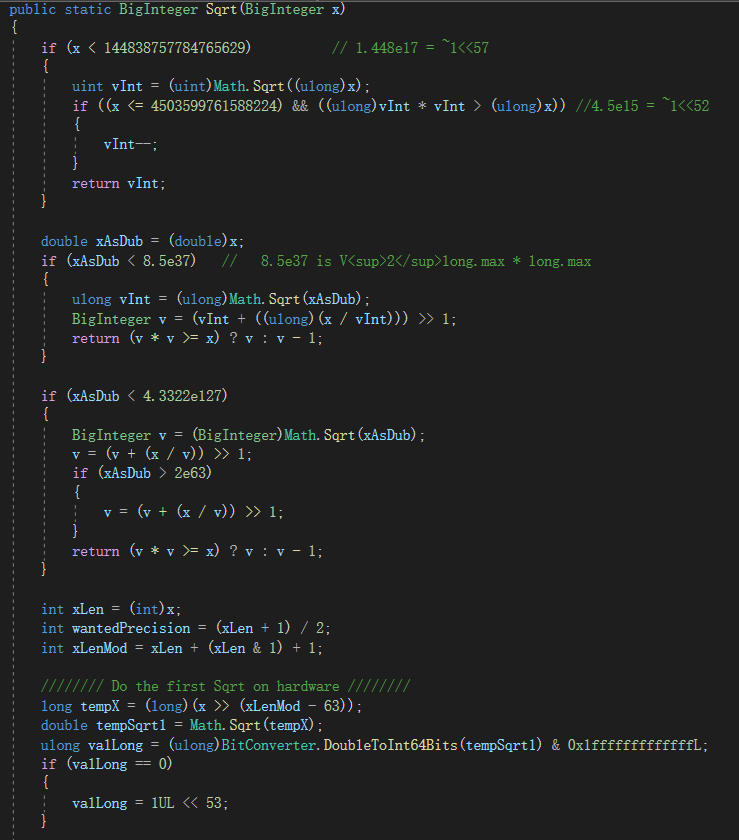
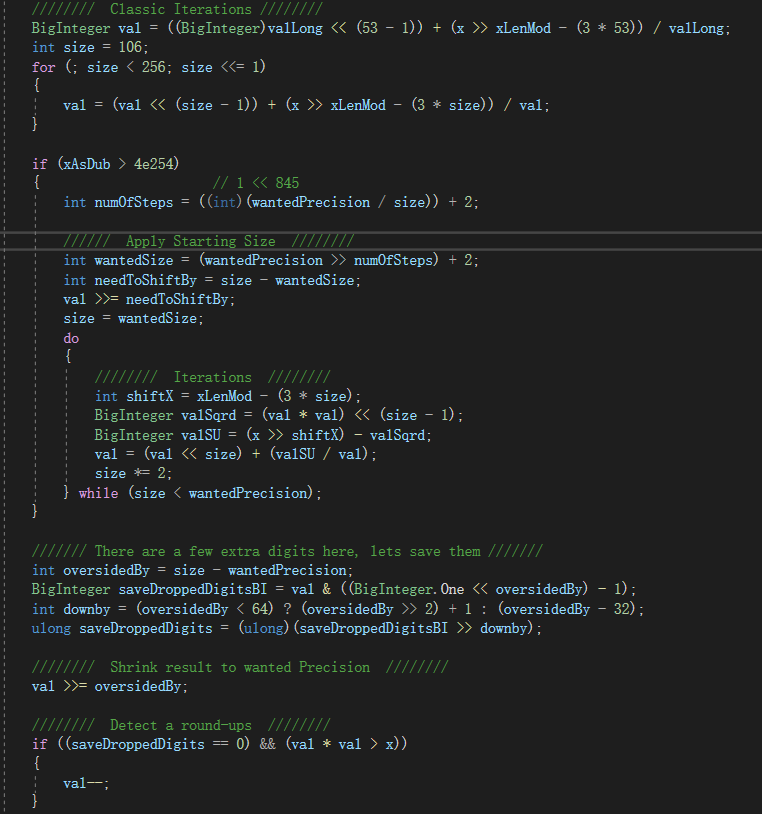
2 算法详细代码
本算法的详细代码如下:
3.1 平方根优化
从对角矩阵开始
A= ≡diag(4, 9)
≡diag(4, 9)
有四个矩阵满足方程式D2=λ,即
D1 := diag(−2,−3) ;D2 := diag(−2, 3) ;D3 := diag(2, −3) ;D4 := diag(2, 3)
但只有D4是λ的平方根,与一维方程相容,前面给出的定义。因此,矩阵函数λ1/2是唯一的定义。
接下来考虑一个对称(因此是实)矩阵A.。这个矩阵可以是对角化使A=SΛS’,其中S是正交的,Λ是对角的。按照对称矩阵函数的通常定义,矩阵,定义A1/2:=SΛ1/2S’,这里是A1/2的定义与之前完全相同。
因为Λ有非负对角元素。因此,对于任何半正定矩阵A,都存在一个唯一的半正定矩阵B,如B2=A;这个唯一的矩阵叫做A的平方根正定(因此非奇异),然后符号A-1/2表示A-1的平方根–它们是一样的。
对于这个算法,已经进行了广泛的测试,为了保证这一点,它将具有大约10%的性能成本。
测试包括:
验证 1:过去数字测试中的常见问题;
验证 2:暴力破解测试(零及以上)[运行速度高达 3.4e11 或 237];
验证 3:2n + [-5 至 +5] 测试;
验证 4:n[2 至 7] + [-2 至 2] 测试;
验证 5:n2 –[0,1] 测试 – 与验证 4 重叠,但测试较大的数字;
验证6:随机数测试。
用传统的方式计算运行,服务器是转不动的,以先进过程控制为例,有几万笔数据进入系统分析,当我们需要把数据知识图谱化,让APC去分析的时候,APC可以24小时进行分析但是我们传统的算法转不动,一定要在更优化的算法才可以带动计算,所以算法非常重要。随着智能制造以及工业4.0的发展,APC技术将与工业大数据技术以及边缘计算等技术融合发展,通常采用预测控制、推断控制、统计过程控制、模糊控制、神经网络控制、非线性控制、鲁棒控制以及软测量等技术,以工艺控制方案分析和数学模型计算为核心,实现过程优化控制和工艺卡边操作,提高自动化水平,提升经济效益,推动制造业的发展。
4 总结:
显然,这些方法的正确应用在很大程度上取决于整个晶圆厂的数据可用性。多变量控制应用有各种尺寸,从少数变量到几十个变量,这些数据可以来自制造设备(例如设备健康指示,正常运行时间数据),来自过程(例如温度,压力)或来自晶片(例如层厚度,层组成)。
因此解决方案可以在两个方面带来进步。它可以为为了能够应用控制算法,必须识别“质量参数”以及“可调参数”。质量参数描述了生产运行是否成功;可调参数是可以实际调整以适应过程的参数。此外,无论在哪里收集数据,都必须特别强调数据质量(例如准确性、分辨率、正确的时间戳记、上下文信息),因为每种控制措施都只能与它所依赖的数据一样好,并提供更合适的方法。
业界可能会从将其作为未来的工作愿景中受益,以追求这些见解和教训,鼓励范式思维,使APC超越其原始范式,并为工业带来新的,更可行和可持续的APC解决方案。
参考文献:
[1] 王巍, 叶甜春, 刘明, et al. 等离子体刻蚀过程的APC技术研究进展[J]. 半导体技术, 2005, 30(012):1-4.
[2] 高雪清. 集成电路制造中的先进制程控制系统设计与实现[D]. 北京大学, 2009.
[3] 吴澍, 袁德成, 刘剑. 半导体制造过程中的先进控制技术[J]. 自动化仪表, 2010(02): 12-15.
[4] 覃伟中,谢道雄,赵劲松.石油化工智能制造[M].化学工业出版社:北京,2018:122.
[5] James Moyne,Jimmy Iskandar.智能制造的大数据分析[J].中国电子商情(基础电子),2020(Z1):57-58+60+62.
[6] Schellenberger M, Roeder G, Öchsner R, et al. Advanced process control–lessons learned from semiconductor manufacturing.
[7] 王巍, 吴志刚. APC技术在刻蚀工艺过程控制中的研究进展[J]. 中国集成电路, 2007, 16(002):68-71.
[8] 李道强. APC在CMP工艺中的应用(I)[J]. 集成电路应用, 2007, 003(003):88.
[9] 李道强. APC在CMP工艺中的应用II[J]. 集成电路应用, 2007, 3(4):60-60.
[10] Abadir, Karim M. and Jan R. Magnus, Matrix Algebra (Econometric Exercises)[M]. Cambridge University Press, 2005.
![]()
3

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号