国网吉林省电力有限公司四平供电公司 136000
摘要:电网安全是国家公共安全的重要部分之一。随着社会经济的不断发展,城市发展以及居民生活对用电的需求也在不断增加,大面积的电网进行互联、分布式电源不断接入,电力系统的安全性以及可靠性成为电力市场发展首要考虑的问题。尤其是如果遇到冰雪灾害等极端天气,对于电路电网的维护及抢修工作更是极大的考验。10kv配电线路带电抢修作业机器人主要通过10kv配电线路带电作业工艺要求和带电作业环境下解决机器人专用技术。研发出能够实现电网维修抢修的带电作业机器人。文章简要阐述了带电抢修作业机器人的系统组成,其次主要对液压机械臂进行了说明,进而对10kv配电线路带电抢修作业机器人专用作业工具展开了分析。
关键词:10kV 配电线路;带电抢修;机械臂
0 引言
在传统的10KV配电线路抢修过程中,通常情况下,在维修的过程中,需要全线停电,并且是人力维修电路故障。这不仅增加了维修成本,还为人们的生活带来了不便。高压线路带电作业是电路维修的重要手段,但是在发展过程中,也有一定的缺陷,比如人力维修效率低下、操作人员直接接触高压电线,存在较大安全隐患、人工抢修安全防护质量较低等问题。因此需要找到有效的解决人工安全事故的机械抢修。
为了找到良好的解决办法,配合我国现阶段电路作业的要求,研制出能够满足我国带电线路抢修作业的机器人是必要的。如图1所示,该机器人作业方式能够完全代替人工完成作业的任务,包括带电生还设备、清除异物等等,不仅能够节约维修时间成本,还能够保障操作人员的生命安全。

图1 全自动配网带电作业机器人
1 系统组成
单臂全自动配网带电作业机器人整体结构主要包括机器人整体操作平台、折叠加伸缩绝缘臂、控制装置移动汽车等四部分。机器人作业平台主要由绝缘斗、机器人操作系统和机械臂等部分组成,这三部分组成的作业平台能够为操作人员提供全自动化的机械设备。折叠加伸缩绝缘臂放置于移动汽车的底盘上,将带电作业机器人运送到需要检修的位置。机器人操作系统主要包括控制装置上下两部分,下部分控制装置固定在回转设备上,并且带有上部分控制装置的切换按钮。上部分控制装置跟机器人作业平台相连接,带有全方位的操作手柄,方便操作人员在绝缘斗内进行操作。
带电作业机器人整体结构是较为复杂的,如图2所示,包含主从操作液压机械臂、机器人专用升降系统、机器人专用作业工具和绝缘防护系统。
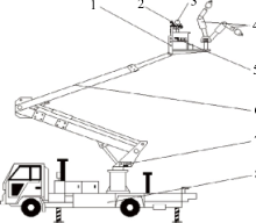
图2 带电作业抢修机器人系统组成
2 主从操作液压机械臂
机械臂是高压带电作业机器人的核心,能够将操作人员和高压电线隔离开,并且高效率的完成抢修维护任务,具有控制精度高、及时性强、安全性高等特点。操纵人员和机械臂之间通过操作按钮执行任务,这样在控制操作主手作业时,能够减轻高压电场对操作人员造成的人身伤害,这也是研发带电作业抢修机器人最关注的问题之一。
2.1 液压机械臂
液压机械臂自身重量较轻,持重能力强、操作灵活,能够支持操控人员远程操作,运用机械臂专用的工具完成带电作业任务。主要构成部分为顶部旋转电机、底部旋转座和上下臂三部分。这种结构能够在灵活的实现带电作业不同要求。
2.2 主手
主手跟机械臂的结构类似,并且在各个关节都设置有高精度的旋转电位计量。主手的各个关节都能够根据传感器信息进行操作,并且跟机械臂之间存在链接,让机械臂跟着主手一起运动[1]。
2.3 液压供油单元
液压系统的主要动力来源是一个压力恒定的液压源。为了防止污染油损坏机械臂内在结构,比如液压缸和液压马达,就必须对液压油进行过滤。液压油的要求一般都会根据带电作业机器人的需求进行供应,从流量、压力和清洁度都会有限制。
2.4 主从控制系统
如图3所示,操作人员在绝缘斗内,左右两边分别为机械臂主手位置,在左右手各个关节上会将机械臂运转情况转化成电压型号输送到左右两边的控制器,操作人员更具电压情况控制左右机械臂运动。

图4 主从控制示意图
3 机器人专用升降系统
机器人升降系统需要采用绝缘斗臂车上操作,将操作人员和机械臂运输到制定位置。整个升降系统主要采用硬铝合金材料焊接而成,同时整个裸露的地方用绝缘材料包裹完整,保证绝缘效果[2]。
4 机器人专用作业工具
带电抢修作业机器人的作业种类繁多,因此需要使用的工具也很复杂。因此,在设计带电作业机器人结构时,也需要考虑到不同动作的作业工具,机器人工具更换是否便捷等问题。一般常见的工具主要包括:机器人自动剥皮工具设计、自动电动扳手设计、自动破螺母工具设计以及机器人电动断线钳工具设计等四大部分。这四个大部分能够实现自动化操作,并且降低工作人员危险性。这四种工具的设计能够满足带电机器人在不同形式下的维修情况,并且相对人工操作来说会更加便利。
5 绝缘防护系统
绝缘防护是保证机器人带电操作的基本。人工操作很多时候都具有很大的危险性,并且没有很好的方法能够真正实现绝对的绝缘,尤其在10KV高压带电工作下,需要稳定的安全防护措施。10KV带电高压机器人能够实现以及防护,将整个操作平台进行绝缘外包,避免短路情况发生
[3]。
7 结论
文章主要对带电机器人的系统组成进行简要阐述,并且了解了带电抢修机器人机械臂构成和工具设计部分原理,再次对绝缘系统的重要性做出了说明,正式我国高压带电机器人作业其实是可行的,并且能够做到实时开发,不断完善带电抢修工作。
参考文献
[1]周军伟,沈海江,李文飞,霍凯龙,莫建中.带电抢修作业机器人运动控制模型构建[J].粘接,2021,45(02):98-102.
[2]叶伟标,杜启业,华栋,崔佩仪.基于电力带电抢修作业的机器人开发与应用[J].设备管理与维修,2018(06):49-50.
[3]李健,鲁守银,李运厂,赵玉良. 10kV配电线路带电抢修作业机器人实用化研究[C]. 山东电机工程学会.山东电机工程学会2012年度学术年会论文集.山东电机工程学会:山东省科学技术协会,2012:262.
[4]于娜,吴功平,江维等.高压线路绝缘子带电更换作业机器人构型与轨迹规划[J]武汉大学学报(工学版),2018,51(07):640-645+653.
[5]叶伟标,杜启业,华栋等基于电力带电抢修作业的机器人开发与应用[J].设备管理与维修,2018(06):49-50.
[6]曹建安,张乐平,吴昊,等,采用倾角传感器实现空间旋转角度测量的解析方法研究[J西安交通大学学报,2013,47(10):109-114.
作者简介:
姓名,贾克音性别男,民族汉,出生年月1976.02,籍贯:吉林省四平市,单位,国网吉林省电力有限公司四平供电公司,专业电气工程,研究方向:电气工程,学历:本科,职称:高级工程师,单位所在省市:吉林省四平市。
国网吉林省电力有限公司科技项目资助2021-20

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号