山东协和学院 山东省济南市 250107
摘要:近年来管道在人们生活以及工业生产中被使用的越来越广泛,与此同时,管道故障所带来的问题日益突显,对国内外关于管道机器人的研究进行介绍,叙述了管道机器人的发展历程,以及近年来国内外管道机器人的发展方向和成果。通过国内外的研究成果对各种类型的管道机器人的结构特性以及其应用领域作了介绍,并对管道机器人的未来发展进行了展望。
关键词:管道机器人
1 引言
近年来,为了保证国家能源消费,中国油气管网建设得到了飞速发展,并相继开通了多条油气战略通道。但随着使用时间的延长,管道在逐渐老化或者腐蚀时会出现裂纹,穿孔,截面积缩小等现象。而管道检测,运维及安全对于我国经济建设发展及人们生活质量影响越来越明显。所以对管道机器人检测与维护技术进行研究是非常紧迫的。
从20世纪50代起就开始对管道机器人进行研究,受益于自动控制技术与计算机技术的飞速发展,管道机器人研究迅速步入快车道,并很快投入到生产与实际应用中。当前,不论是在石油,天然气,化工,核设施等传统工业领域还是在城市水管道,油烟管道和生物医药等领域,管道机器人都有其应用场景,管道机器人可谓随处可见。它不仅能满足管道机器人检测,施工和维护维修的要求,而且还能促进管道机器人理论研究的飞速发展。这说明管道机器人一定会发展得越来越快。
1.1 管道机器人发展状况
西方国家是世界上最早开展管道机器人研究的国家之一,其中发达国家是世界上在这一领域开展研究最早、居世界领先地位的国家之一,有关研究工作取得了很多成果,并已具有较高的实际应用水平。而我国对管道机器人的研发虽起步晚,但是经过上海交通大学,清华大学,哈尔滨工业大学等国内顶尖高校及研发机构的共同努力,我国管道机器人领域技术研发得到了快速发展[1-2]。
1.2 国外研究现状
19世纪70年代管道运输在美国得到快速发展,大大提高了美国管道检测设备研究的必要性。 1962年Knapp&Girard公司开发了管道清洗机器人“管道猪”(PIG)[3]。
PIG作为早期最典型的管道内清理检测设备之一,不具备自主驱动能力,管道内向前运动的动力都来自于其头端流体压力差,而且不需要拖带电缆或者搭载蓄电池驱动,可同时行走数百公里。随着科学技术的不断发展,这种机器人已经发展成为集管道腐蚀,管道变形,管道裂纹检测及定位,管道测绘等功能为一体的智能化管道猪。Tuboscope漏磁检测智能清管器开创了管道智能检测新时代。 超声波检测的智能清管器是在80年代问世的。
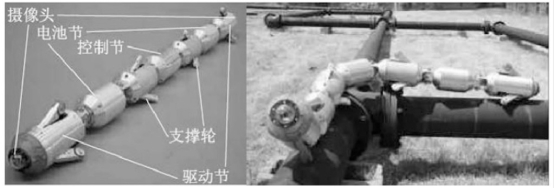
1962年,美国率先研制出世界上第一个工业机器人。 美国研究基础强、技术先进、已拥有智能管道猪等多种成熟的管道机器人产品、是全球机器人技术最强大的国家之一。卡内基梅隆大学Hagen Schempf医生和纽约煤气集团公司Daphne D'Zurko公司于2001年共同研制出一种无缆线管道机器人EXLORER.EXLORER是一种长距离作业的管道机器人。这种管道机器人专为煤气管道探测而设计,可穿过90°弯管及"T"形管等复杂管道。如图所示:
1998年,德国H-B.Kuntze等人研制出了一款采用四轮独立伺服驱动的管道检测机器人。该管道机器人的难点在于整机的控制,作为一个拥有21个自由度的机器人,每个自由度的协调控制都会影响到运行的可靠性。MAKRO可以适应直径300~600mm的管道MAKRO适用于直径300~600mm的管道。
加拿大Inuktun公司研制出的Versatrax系列管道机器人,是国外现有的成型管道机器人中十分成功的一款机器人。目前已经推出了Versatrax150TM的下一代机型MarkII。Mark继承了Versatrax150的履带式布局,同时扩展了Versatrax150的性能。MarkII可检测管道最小管道直径为150mm,电缆范围增加到1000米,并且支持更换更长的电缆。
1.3 国内研究现状
上海交通大学颜国正教授和他的研究小组是第一个开始对管道机器人进行系统研究并取得最大成就的人。这个小组从1998年起开发了一个微小型电磁驱动管道机器人。机器人的结构简单,体积小,只有7mm。 通过对激励脉冲时序及频率的控制,控制简单,比较灵活。非常适合在与人体肠道和食道相似的狭小管道内工作[4]。从2003年开始,颜国正教授团队在煤气管道机器人领域开展了系列研究工作,完成了数代煤气管道机器人原型。从2003年开始,颜国正教授团队在煤气管道机器人领域开展了系列研究工作,完成了数代煤气管道机器人原型。
2005年,上海交通大学研发出一款基于SMA驱动的正方体型的微小型蠕动式管道机器人,该机器人由12组SMA直线驱动蠕动单元构成,外形为正方形,如图5所示。该管道机器人的结构尺寸为35mm×35mm×35mm,可在直径2英寸的管道内实现蠕动行进,最大速度是10mm/min,用12个由SMA和偏置弹簧构成的驱动源进行驱动,利用电阻反馈进行控制。该管道机器人通过模仿肛肠动物的行走方式运动,使其可在直管、直角弯管还有大曲率半径等复杂管道中爬行[5]。
2 存在的问题
2.1 能源供给问题。
传统的管内机器人多采用拖缆的方式进行能源供应,拖缆摩擦机器人在管道机器人对长距离的运输或者管道不平的情况下带着电缆行走明显有问题。 因此,长距离能源供应是管道机器人发展中需要解决的首要问题。
2.2 定位与越障能力。
常规管道机器人一般使用光电码盘与驱动轮连接来进行控制,从而实现检测。但在复杂管道内,管内信号受电磁屏蔽或管壁光滑程度影响,会在输送反馈信号时形成阻碍,有时甚至会导致管道机器人宕机。这对管道机器人工作的时效性和安全性带来了极大的隐患。因此,管道机器人设计中,管道机器人的感应识别与越障能力是十分必要的。由于管内可能存在凸台、碎石、沉积物、管沟等障碍,因此需要机器人能够装备摄像机、感应器等检测设备或清洁设备,以在管内实现进退、转弯、越障、定位、导航等功能。
3 展望
3.1 自主行走能力。
不断成熟的人工智能技术,推动了智能机器人的飞速发展,而智能管道机器人已成为当前的研究热点。智能机器人是以智能控制算法作为运作核心的,因此合适的智能控制算法是智能机器人研究的关键技术。智能管道机器人的自主性可以得到飞跃性的提升,从而提高检测效率和检测质量。
3.2 智能图像处理。
快速发展的图像处理技术使得管道机器人的检测能力进一步提高,而该项技术的广泛应用可以使管道机器人适应更广泛多样的应用场景,如管内缺陷可通过对拍摄图像的处理,可以获得管内缺陷更为具体清晰的数据,并进行针对性的修复处理。在机器人的行进过程中,图像信息的智能处理可为机器人的管内操作提供便利。通过智能图像处理,机器人能快速识别前方障碍、破损等,为其行进路线的规划、管内检测作业提供良好的条件。
参考文献
[1]王耀华,左仁贵.国内外微小管道机器人的研究现状[J].机械设计,2010,27(12):1-5,17
[2]李龙辉,张体刚,高慧,等.管道机器人发展研究[J].机械制造,2020,58(10):5-7
[3]朱喜平.天然气长输管道清管技术[J].石油工程建设,2005(3):12-16,3
[4]颜国正,丁国清,戎荣,等.电磁型微小管道机器人的研究[J].上海交通大学学报,1998(8):124-127
[5]王嵩,曹志奎.一种基于SMA的管道里蠕动机器人及其反馈控制[J].传动技术,2005(1):29-32

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



