山东正维勘察测绘有限公司
摘要:航空摄影测量技术一直以来都是获取灾害现场信息的最直接的技术手段,无人机让应急航空摄影更为便利。利用无人机搭载光学相机,通过摄影测量数据处理技术可获取灾害现场高精度三维几何数据,是应急指挥和决策的重要依据。以深度学习为代表的人工智能技术是近十几年来信息技术领域最为重要的革命,尤其是在图像和语音识别领域进展极其迅速。深度学习与摄影测量的融合应用目前处于学术研究并逐步进入实用领域的状态。
关键词:深度学习 无人机 航空摄影测量
1 无人机航空摄影测量发展现状
应用无人机航空摄影测量技术可以为测量人员提供正确的地理信息数据。无人机进行航拍测量受外部环境因素影响比较小,可以快速传输各项地理数据信息,使地形测绘数据更具时效性。同时,测量人员可以全面利用各项图像,实现数据的三维转化,为后续的三维建模提供可靠依据。应用此项测量技术可以减轻测量人员的工作强度与压力。采用无人机测量方式时,测量人员通过合理控制无人机,让无人机在垂直或倾斜状态下进行摄影,能够显著减少工作人员的压力。同时,测量人员还要合理设定无人机的飞行路线,针对各项数据进行有效分析与控制,如果工况比较差,可以暂停飞行,待工况符合飞行条件后,方可开展后续的地形测绘工作。
2 深度学习的技术原理
深度学习的发展是由最初的端到具体的类别标签再到端对端的模型演变,起源于人工神经网络,神经网络是受到人的大脑神经元的启发从而达到抽象计算的模型,可以由低层次的初始数据经过神经网络的线性或非线性计算映射到高层次的特征表达。人们只要确定了网络的层数与大致结构,训练时不用去管它是如何训练学习到图像的特征的,也就是说人们不用关心里面的参数运算的原理以及权重是如何经过反馈调整到最佳的权重值的,只要关心这样的模型结构会有什么样的预测结果,根据预测结果适当调整模型结构即可,这种模式类似于黑盒子机制。
CNN是一种卷积神经网络,卷积结构则大大利于二维图像的分类,与常规的深度学习算法相比,CNN主要由三部分构成,分别是第一部分:卷积层部分,第二部分:池化层部分,第三部分:全连接层部分。对于卷积神经网络来说最核心的作用就是通过自主性的机器学习来提取影像的内在特征,而这种内在的特征在普通的一维视域内是无法完成的,所以需要提高到二维视域内进行内在特征的提取,这种内在特征的提取主要是通过CNN结构的第一部分和第二部分完成的,也就是卷积层部分和池化层部分来完成内在特征的提取。通过提高到二维视域提取影像的内在特征,提取完成之后还需要降维,这就是CNN结构的第三部分的作用,全连接层则是把提取的特征进行从二维映射到一维从而进行分类。CNN要想完成从一维视域提高到二维视域提取内在特征,然后再从二维视域降低到一维视域,必须要依赖三个相互关联的过程,这三个过程分别是局部感知用来提取影像的内在特征,权值共享用来将每一个像素点的权值进行共享从而完成内在特征的提取,下采样用来将视域范围从二维降低到一维。这样既可以提升分类准确度及效果,另一方面减少了模型训练所需的参数数量,从而使得网络更容易得到优化。
CNN的网络结构大体与普通的神经网络类似,几乎都是由所需的神经元组成,通过不断的训练和反馈,可以不断更新每一个神经元的权重和偏置以达到最优的效果,同样每训练完一个模型,可以通过修改模型的参数进行结果的进一步优化。然而CNN在很多地方与普通网络相比有着很大的差别,复杂程度页明显比普通网络高。普通网络只是很多的一维神经元相连接的结构,而CNN是针对二维影像的一种模型,可以训练具有多个通道的影像,遥感影像大多都是多通道的影像,而大多数普通图片也都是包含RGB三个通道的,CNN有助于挖掘图像的内部特征。CNN比普通的神经网络新增了3种不同的结构,这3种结构有利于图像的特征提取,分别是第一部分:卷积层部分,第二部分:池化层部分,第三部分:全连接层部分。对于卷积神经网络来说最核心的作用就是通过自主性的机器学习来提取影像的内在特征,而这种内在的特征在普通的一维视域内是无法完成的,所以需要提高到二维视域内进行内在特征的提取,这种内在特征的提取主要是通过CNN结构的第一部分和第二部分完成的,也就是卷积层部分和池化层部分来完成内在特征的提取。通过提高到二维视域提取影像的内在特征,提取完成之后还需要降维,这就是CNN结构的第三部分的作用,全连接层则是把提取的特征进行从二维映射到一维从而进行分类。其中卷积层部分和池化层部分是由多个二维的特征图构成的,每一个特征图又可以进一步细分为很多神经元,大体呈矩形形状,形状大小可由像素宽高根据训练图片样本大小来调整。由于卷积层部分可以细分为特征图,特征图又可以进一步细分为神经元,而且每一个神经元的偏置是完全一致的,同时每一个神经元的权重也是没有差别的,这样就可以实现无差别化的提取特征数据。而且对于CNN的网络结构而言,神经元连接的是上一层的二维区域,这样就可以进一步将权重参数转变为卷积核,用来提取影像的特征。每一个卷积层后接一个池化层,用来简化卷积后的特征,减小了特征图的尺寸,简化了参与模型运算的参数,最后经全连接层展平成一维也不会很大。
CNN现今流行的架构为VGGNet,如图1,它是由图像输入层、13个隐藏层和最后的类别输出层组成,其中每一层都有提前设定好的参数,图象输入层的大小是224×224,输入进来后的图像首要要进行卷积处理和池化处理,这样的处理过程一共进行了5次,可以得到7×7大小、512维的数据,这些数据就可以进一步称之为特征图,最后经过两个全连接层展城一维张量,得到一个1000维的输出层,1000表示为类别个数,输出层是由输入层人为定义好的所有类别的个数,为了便于后续的计算机处理,VGGNet架构进一步开展了编码操作,从而得到概率数据。
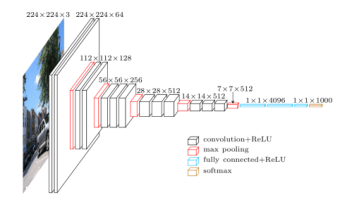
图1VGGNet网络结构
3 深度学习在无人机航空测量中的应用展望
深度学习作为一种颠覆性基础技术,与无人机航空摄影测量技术结合是必然的,近五年开始出现大量研究。从目前的进展看,主要是针对摄影测量技术流水线的部分环节进行优化,其中不少是利用深度学习改善特征描述和特征匹配,除此之外,CNN网络也被直接用来完成基于立体影像的三维深度估计,网络被训练好之后,三维点云的生成计算简单且速度很快。“快”也是应急管理数据获取的重要要求。实际上,基于深度学习技术,一些研究已经能做到大场景三维数据的准实时生成。深度学习最为突出的能力就是内容识别,而内容识别本身又是耗费人力的重复性工作。
参考文献
[1]冼少梅.无人机航空测量技术在地形测绘中的应用[J].中华建设,2021,08:104-105.
[2]阿旺仁增,辛堂.无人机航空测量技术在地形测绘中的应用[J].四川有色金属,2019,04:4-6+46.
[3]张军.无人机航空摄影测量在“房地一体”地形测量中的具体应用要点[J].科技创新与应用,2022,1208:161-163.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



