湖北美华电子科技有限公司 湖北 武汉 430000
摘要:PLC技术的应用下,增强了谐波控制工具的稳定性和控制精度,加强了自抗扰控制器自身的扰动抑制功能,为谐波控制提供技术支持。但此次研究采用Floquet理论确定了谐振控制参数,没有研究其他理论下谐振控制参数的取值情况,为此该结果可能存在一些偏差,今后可根据其他稳定性分析理论确认谐振控制参数,通过多组测试进一步确定参数取值。
关键词:PLC技术;电气传动机械;自抗扰控制器;基频谐振;自动控制;稳定性;
中性点不接地或接地效果不佳时,电气传动机械出现不同类型谐振,影响运行稳定性从而威胁建筑施工安全,为了在不平衡条件下,优化控制变流器的运行状态,基于比例积分谐振设计一个控制器,通过不平衡数学模型分析相关控制系数,为变流器的平稳运行提供保障。
1 建筑施工电气传动机械谐振自动控制方法
1.1 基于PLC技术的自抗扰控制器设计
受建筑施工环境因素和机械自身因素影响,实践过程中环境因素以及产生的外力、摩擦力等,导致谐振自动控制方法存在较大的不定性,所以针对谐振控制问题,采用PLC技术设计自抗扰控制器,辅助自动控制效果。
设计的自抗扰控制器由跟踪微分器、反馈控制器以及扩张状态观测器三个部分构成,而PLC芯片对各个模块进行协调控制,其中跟踪微分器部署过渡过程。利用PLC技术调整超调量过大、快速性两个问题,通过下列公式控制跟踪微分器运行:


上述公式中:d表示控制参数;r表示控制量极限值;l表示跟踪参数;y表示输出控制信号;x1、x2表示机械状态量,也就是谐振的波动情况;q、q0表示线性反馈值。跟踪微分器通过PLC技术控制最速,设置对象输出的估计值为γ1,一阶导数、二阶导数分别为γ2和γ3,PLC技术通过将二阶导数反馈给非线性控制器,实现对扰动的补偿,公式为:
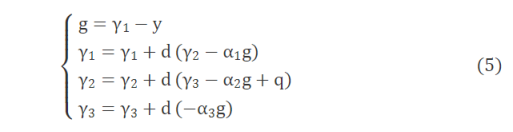
公式中:g表示控制信号差;α1、α2、α3表示扩张状态观测器的实时控制指令微分。通过PLC技术完成对自抗扰控制器运行的控制。根据自抗扰控制器的三个组成部分,PLC技术为对应的三个模块,提供不同的控制模式,实现控制器对扰动因素的抑制,帮助自动控制排除扰动因素。
1.2 判断电气传动机械基频谐振
已知回路参数影响下,机械电压互感器的各励磁电感饱和程度存在差异性,导致中性点位移过电压,此时引发基频谐振,四种不同情况为:第一种是当设备正常运行时,感抗与导线抗并联后形成容抗B′,当遭受外界环境因素扰动时,每一相感抗与导线生成等效感抗C′,此时的等效电容用B′A、B′B、B′C表示,根据电压定律得到中性点偏移电压为:

此时三相饱和为容性,满足电流平衡条件,虽然饱和程度具有差别,但饱和一相以及饱和两相出现时,不会超过线电压。第二种情况为一相励磁电感严重饱和,其余两相为容性,则中性点偏移电压为:
![]()
上述表示A相饱和,B、C相非饱和。第三种是两相励磁电感严重饱和,剩余一相为容性,则中性点偏移电压为:

第四种是三相励磁电感全部严重饱和,此时与第一种情况一致,中性点偏移电压参考公式(6)计算获得。由于基频谐振的电压特征与第三种情况近似,所以利用公式(8)确定基频谐振发生时的电压特征。假设中性点不接地的情况下三相对称,则单相接地时的中性点偏移电压为:

公式中:HA表示电源电动势;u表示线路;R表示接地电阻;B表示电容。根据上述分析,当产生基频谐振时,根据相电压和相位跳变判断基频谐振。当三相电压都升高时,则发生了铁磁谐振;当三相电压中的两相电压超过额定电压、一相电压低于额定电压时,则产生了基频谐振,不过当相位差超过基准值时,则表示故障,以此在抑制扰动的前提下,实现对基频谐振和单相接地的区分。
1.3 机械谐振动力学方程自动控制谐振
利用自抗扰控制器,消除外部因素给基频谐振带来的影响,获得确定的基频谐振,根据建立的机械谐振动力学方程,实现谐振自动控制。假设垂直位移为z、板之间的距离为f、有效集中质量为m、线性以及非线性刚度为h1和h2、自抗扰控制器的抗扰系数为β、机械交流电压频率为p,则方程为:

公式中:V1、V2分别表示直流电压和交流电压。假设V1
![]()
公式中:ω表示固有频率;a、b、c、ζ表示无量纲参数。在自抗扰控制器的PLC控制效果下,无量纲方程加入控制系数rp和ri,表示位移时滞和速度时滞。设置公式(11)的结果为W,此时方程可设置为:
![]()
公式中:v表示运行速度。假设谐振电流、励磁电流分别为ia和ib,谐振电容两端电压、滤波电容两端电压分别为va和vb,设置控制角频率为θ,利用泰勒展式展开公式(12)中的非线性项,输出机械状态方程组:
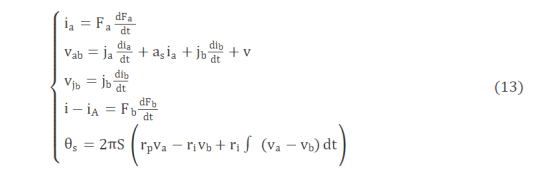
上述公式中的谐振参数rp、ri直接影响控制稳定性,所以通过改变上述两组参数,获得不同状态下的机械运行状态,根据实时比较数据自动控制建筑施工电气传动机械谐振。
2 控制参数设置
2.1 稳定性理论判断依据
针对建筑施工周期,Floquet稳定性理论将摄动方程视为状态传递矩阵,根据该矩阵的特征值变化情况,判断机械谐振控制的稳定性。该机械的表达方式为:

设置XP为稳态解,该解的计算公式为XP(t)=XP(t+T)XΡ(t)=XΡ(t+Τ)。假设稳态解处存在一个扰动值λ(t)λ(t),根据公式(14)得到:

公式中:A(t)A(t)表示雅克比矩阵。Floquet理论定义,根据公式(15)可判别摄动方程零解稳定性,根据该结果就可以判断当前机械控制的稳定性。设置摄动方程为φ(t)φ(t),则存在φ(t)=η(t)etZφ(t)=η(t)etΖ,其中η(t)η(t)表示非奇异周期阵、Z表示常数矩阵。设置摄动方程一个基本解的矩阵为φ(t+T)φ(t+Τ),则根据公式(15)得到:
![]()
已知矩阵具有唯一性,所以根据公式(15)和公式(16),描述摄动方程不同条件解之间的关系:
![]()
假设etZ=F,即状态传递矩阵为F,根据Floquet理论可知该矩阵通过雅克比矩阵A(t)A(t)和常数矩阵Z决定,与机械初始运行状态无关,当A(t)A(t)为常数矩阵时,则存在:

此时存在etA=F。当矩阵A(t)A(t)随着时间的变化而不断改变时,则每个时间变化区间,均可被类比为常数矩阵,即:

公式中:k表示矩阵中的第k个子区间;Δi表示子区间规模。Floquet理论基于扰动因子确定了扰动传递函数Di,认为Di=FnDi=Fn,其中n表示运用周期,由于扰动传递函数既表示状态传递矩阵,又表示t时刻下的扰动与第n个周期中的扰动的传递矩阵,所以认为limn→∞Fn=0limn→∞Fn=0,根据上述结果判断稳定性:
(1)当F的最大特征值的模小于1时,认为机械谐振控制稳定。
(2)当F的最大特征值的模等于1时,认为机械谐振控制临界稳定。
(3)当F的最大特征值的模大于1时,认为机械谐振控制不稳定。
2.2 PLC应用效果
基于PLC技术的谐振自动控制方法,通过设计的自抗扰控制器抑制扰动因素,获得电流信号。
已知在三种不同的因素影响下,建筑施工机械产生了3种扰动,影响谐振判别结果。但基于PLC技术设计的自抗扰控制器,通过数据跟踪、实时反馈以及状态监测三个步骤抑制扰动,所以电流信号在4.5 s之内恢复到具有一定规律的稳定运行状态,将扰动信息剔除后得到了实际谐振导致的电流波动。假设建筑施工电气传动机械,在基于PLC技术的自抗扰控制器下,能够以一定程度的稳定性持续运行,但还是存在不稳定的情况,所以根据稳定性理论判断依据,计算矩阵F的最大特征值的模长,通过比较模长与复平面单位圆之间的关系,判定自动控制方法的稳定性。已知公式(13)中的谐振参数rp、ri直接影响机械谐振控制的稳定性,所以通过改变上述两组系数,分析控制的稳定性。
3 结束语
建筑施工电气传动机械产生的谐振,与接地电压之间具有较高相似性,在外界因素影响下判断谐振类别时容易出错,导致谐振自动控制不稳定,结合PLC技术抗干扰能力强的特点,研究建筑施工电气传动机械谐振自动控制方法。设计自抗扰控制器,利用PLC技术组成跟踪、反馈、观测模块,抑制外界扰动因素;根据电压定律计算中性点偏移电压,判断电气传动机械谐振;建立机械谐振动力学方程,通过改变位移时滞rp和速度时滞ri,自动控制电气传动机械谐振。实验采用Floquet稳定性理论判断谐振控制稳定性。
参考文献
[1]张树基,罗映红,王云,等.不平衡电网电压下风力发电机网侧变流器控制研究[J].电测与仪表,2019,56(09):81-85.
[2]朱明祥,王鑫,孙红艳,等.永磁无刷直流电机的比例谐振控制[J].电气传动,2019,49(07):14-19.
[3]胡文华,张军仁,董运.一种提高系统稳定性的改进谐振控制器[J].电气传动,2020,50(02):77-81.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



