山东英才学院 工学院,山东 济南 250104
摘要:基于柔性阵列式力敏传感操控器的研究,意义是在传统传感器的基础上创造出一种可以附着在统对传感器施加标准的压力,其压力误差小于0.2kpa。运用垂直压力形成压力敏感点,随着压力增加,使导电层降低对电子流动的阻力,使电阻减小,通过测量电阻值的变化从而可以映射出接触面的压力变化,通过电路釆集每个敏感点的电阻对应的电阻变化就能够转换为相应的压力变化。运用A/D电路链接从而实现对目标进行柔性力敏控制。解决了传感器灵敏度不强的问题,使其柔软便携,目标柔性阵列式力敏传感器静任意器械上的传感操控器,当敏感点接触到压力时,其电阻元件将感测到的力学变化转换为电阻变化。利用气体压强理论,设计出智能的柔性阵列式力敏传感器的压力加载系统,根据预设的压力值,系态标定的综合精度在1.25%F.S。
关键词:柔性阵列式;传感操控器;气体压强理论;压力敏感点;A/D电路
0引言
随着力传感技术不断发展并满足新的需求。从医院到工厂再到生活的起居室,自动化系统随处可见。其中力传感器能够提供触觉反馈,在自动化系统中的占有重要的地位并且力传感器的集成化和智能化的趋势越来越明显,各种高级智能设备对传感器微型化、柔性化和数字化方面的要求也越来越高。火灾问题是我们每个人都紧张的问题,我们的消防员同志们阻止了很多灾害发生,灭火过程需要高压水枪,高压水枪在灭火的过程中需要面对火苗的地方不断调整水流的大小和方向,如果压力过大水流过急会导致调整方向费力费时,紧急情况时可能会导致火灾不能及时控制。所以我们对水枪的控制进行优化,如果我们在手握水枪的时候能根据自己的握力来调整水流的压力大小,这样提高消防员效率。通过MECART钰芯PET柔性叉指电极柔性科可穿戴电子用气敏传感器和电阻式薄膜压力传感器力敏机器人柔性FSR4027MM,两种柔性材料的传感器来进行比对获得了柔性材料特性研究报告。
基于柔性阵列式力敏传感操控器的研究试用范围广,可以应用到很多领域,比如消防、医疗、汽车领域等,具有极高的应用前景及研究拓展。
1硬件设计
1.1柔性阵列式力敏传感器的压力装载设计
力传感操控器运用柔性阵列式力敏传感器,利用正压电效应。正压电效应是指:当晶体受到某固定方向外力的作用时,内部就产生电极化现象,同时在某两个表面上产生符号相反的电荷;当外力撤去后,晶体又恢复到不带电的状态;当外力作用方向改变时,电荷的极性也随之改变;晶体受力所产生的电荷量与外力的大小成正比。压力加载装置是基于柔性阵列式力敏传感器设计,是一种传感器面积标定装置:能够一次性对阵列式传感器上所有敏感点施加同等大小的压力。其压力釆用气压提供,根据气体压强的特性,在密闭容器中,容器各部分受到的气压相等,从而能够使得柔性阵列式力敏传感器上所有的敏感点都能够受到同样大小的气体压力。
压力加载系统主要的器件有标准压力传感器、刚性密封箱体、柔性橡胶薄膜、电磁继电器开关、气泵、节流阀、气压表。为了能够即准确又快速的完成标定,根据柔性阵列式力敏传感器的特点,其压力加载系统需要满足下列条件:①标定操作简单、时间短;②密封箱体足够大,能够满足柔性阵列式力敏传感器的大小;③加载的压力范围需要超过传感器的最大量程。④标准压力表的精度等级需要高于传感器标定的精度等级。根据上述条件,在设计压力加载系统的器件选择有一定要求。
1.2力敏传感器的研究
通过MECART钰芯PET柔性叉指电极柔性科可穿戴电子用气敏传感器和电阻式薄膜压力传感器力敏机器人柔性FSR4027MM,两种柔性材料的传感器来进行比对获得了柔性材料特性研究报告。柔性阵列式压力传感器,可用于任意2个柔性或柔/刚接触面表面作用力的分布检测,一般为平面结构。它不仅具有普通阵列式传感器的优点,还具有良好的柔韧性,可以自由弯曲甚至折叠,能够方便地对复杂表面形状的零件进行检测,广泛应用于接触式测量、无损检测、机器人、生物力学等领域。
2 软件设计
2.1 传感器的压力标定
标定的柔性阵列式力敏传感器,在标定之前首先测试其信号输出,观察传感器是否有缺行或缺列现象,用于标定的柔性阵列式力敏传感器信号输出 必须完整,不能有缺行或缺列现象。传感器标定过程如下;
①安装固定。将柔性力敏传感器放置在压力加载装置内并固定,检查固定螺丝是否拧紧,防止标定过程中发生意外事故;
②校零。在室内气压下调整标准压力表读数使其为0kpa。
③开始标定前,使用压力加载装置重复加载压力至满量程三次。
④标定时,气体压力从0kpa开始,在满量程范围内按气压增加方向每隔10kpa 加载一次气压,当加载到指定气压3分钟后记录每次加载完成后电压值,记 录结果为连续的9次测量值。
⑤当压力显示软件界面传感器敏感点的电压数字量出现较多满刻度值时停止加压,一般为整张传感器的10%左右。
2.2 A/D转换电路
A/D转换器的主要作用是将外界的模拟量变换为数字量进行处理。图3-18 所示为A/D转换器的结构。它的工作原理如下:当A/D转换器的控制逻辑电路 接收到启动脉冲时,控制逻辑电路将移位寄存器的最高位设置为1,其余为设置 为0,D/A转换器将移位寄存器的数据转换成模拟电压量与A/D转换器的外界模 拟电压相比较,如果输入电压大于或者等于转换的模拟电压,控制逻辑电路改变 数据寄存器中对应的最高位设置为1,否则设置为0。移位寄存器再将其最高位数据移位至次高位,通过再次比较确定数据寄存器的次高位数据,直到比较结束,最终获得A/D转换器的结果。如图1所示:

图1 A/D转换电路原理图
2.3 压力力敏传感器的线性度和迟滞的研究
在一系列的标准压力下对待测敏感点进行测量,记录敏感点输出的电压数字量。使用最小二乘法的方法对测试点分别进行直线拟合和曲线拟合,得到柔性力敏传感器的两条特性曲线,图2-7所示为该敏感点线性度。根据测量数据拟合出一条直线y=1.5287x-7.2868和一条二次曲线y2=-0.0009x2+1.6924x-12.4706计算出敏感点量程范围内两条曲线的最大差值。y2-=-0.0009x2+0.1637x-5.1838,可求得y的最大差值y=5.1838。该敏感点线性度=±5.1838/255*100%=2.03%F·S。
在一系列标准压力下对待测敏感点进行测量,记录传感器敏感点加载和卸载过程中的电压数字量输出。拟合出敏感点的加载及卸载曲线。该敏感点的退带特性如图2-9所示。根据测量数据拟合出一条正向行程二次函数曲线和一条反向形成二次曲线。y1=-0.0009x2+1.6924x-12.4706,y2=0.00342+2.1771x-19.3676。
计算出最大差值y=16.5964,则敏感点退8=16.5964/255*100%-6.51%F·S。
2.4 软件技术路线
(1)柔性阵列式力敏传感器标定算法研究。研究出独特的传感器标定算法,传统的标定方法由标定数据拟合成标定直线,本文方法将传感器输出范围按不同 数量直线均等划分从而得到不同数量的标定直线,再将使传感器的敏感点划分到 不同的标定直线上,从而减少了不必要的标定数据拟合时间。再通过设置一定的标准设计出最优数目标定直线选择算法,使算法能够选择出最优数量的标定直线。使用验证的方法测算出算法的精度。
(2)基于神经网络的方法优化标定算法。在标定算法的基础上,进一步提出神经网络的方法训练出分类标定直线的分类模型,减少传感器敏感点分类时间。
3 测试方案及结果
3.1系统静态特性的测试
通过对柔性传感器的研究我们得出了一下结论,我们首先对其线性度为切入点来进行表示如果来说我们的实验在正常情况下产生的实验数据是呈线性的,非线性则是呈现出在实验过程中偏离该线的量。所以我们通常用上升直线来表示出,我们的实验结果也呈现出近似的指标如图2所示:
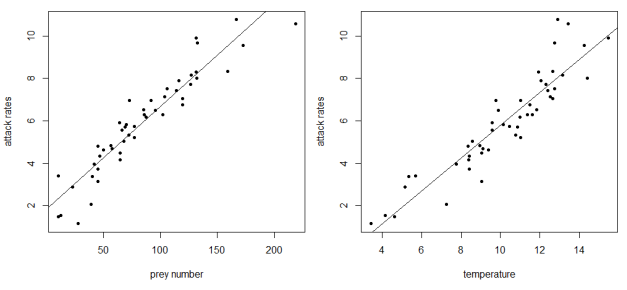
图2 线性表Matlab展示
3.2测试方法
(1)通过基于柔性阵列式力敏传感器的力传感操控器的灵敏度来展示柔性的这一特点,通过输入和输出变化之比,计算出其斜率。然后通过公式来进行灵敏度的计算,先测量没有外力输入的y0,再对其加入一定压力x,测量输出y就可以计算出S,S=y-y0/x。
(2)通过运用巧妙的方法计算不确定因素,比如我们对于传感器的迟滞这一不确定特性进行了测量表示,首先先加载量程加载到满载量程记录实验数据,再通过满载量程拆卸量程为0来比对柔性阵列式传感器的迟滞。
3.3测试结果
成果表示为我们通过对传统标定方式和压力装载标定方式的对比来表示,传统的传感器标定算法式根据传感器的标定数据,使用最小二乘法对其进行线性拟合,对于柔性阵列式力敏传感器,包含3600个敏感带,使用传统标定发发需要3600条标定直线,为了验证标定算法结果的准确性,比较两种算法之间的差异。我们通过做实验对两种标定方式,以标定压力值为测试的目标,通过计算和记录得出如下表格,表格表示出两种方法的数值差异以此来判断测试的准确性。表格为两种不同的标定算法比较:
表1 对比计算结果
标定压力值(K·pa) | 传统标定算法标定精度(%F·S) | 本文标定算法标定精度(%F·S) |
10 | 3.62 | 5.28 |
20 | 2.34 | 3.49 |
30 | 0.46 | 1.18 |
40 | 0.43 | 0.70 |
50 | 0.73 | 0.46 |
60 | 0.96 | 0.15 |
70 | 1.17 | 0.12 |
80 | 1.27 | 0.26 |
90 | 1.28 | 0.35 |
100 | 1.08 | 0.53 |
110 | 1.71 | 0.87 |
120 | 1.06 | 0.27 |
130 | 0.42 | 0.29 |
140 | 0.21 | 0.89 |
150 | 1.05 | 1.70 |
160 | 2.02 | 2.61 |
4结束语
研究结果表明:本文对柔性阵列式力敏传感器标定系统研究取得了一定的成果。通过与传统的标定方法对比,本文标定算法在精度及算法运行时间上均优于 传统算法,能够在一定程度上满足柔性阵列式力敏传感器的标定需求。
运用本文的标定系统及标定方法,柔性阵列式力敏传感器静态标定的综合精度在2%F-S,能够满足柔性阵列式力敏传感器的一般应用需求。可以运用到我们的一开始所提出的高压水枪上面,如果研发成功运用面很广泛可以运用的医疗设备上,消防等等。
参考文献:
[1]黄英,高峰,仇怀利,等.用于接触压力测量的柔性力敏导电胶研究[J]. 功能材料,2008,39⑵.
[2]王萍萍,袁雪,陈松,等.基于石墨烯/聚丙烯酸三维多孔材料的高灵敏高稳定柔性压阻材料的制备及其应用[J].功能材料,2018,49(02):0-0.
[3]汪卫华.基于力敏导电橡胶的宽量程柔性触觉传感器的研究[D].合肥工业大学,2016.
[4]向舊.基于新型三维柔性触觉传感器的力敏导电硅橡胶导电机理研究[D]. 合肥工业大学,2009.
[5]陈平.基于丝网印刷技术的生物传感器的研究[D].中南大学,2013.
[6]孙慧明,于泉,王姝睿.压力传感器的最佳拟合直线[J].黑龙江大学自然科学 学报,1994(02):67-70.
[7]杜水友,章皓,郑永军,等.最小二乘法拟合压力传感器二次曲线及精度分析 [J].中国计量学院学报,2005(03):185-187.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



