飞行模拟器进场着陆导航仿真的研究与实现
薛长宝惠佳鹏 杨志超
中航西安飞机工业集团股份有限公司,陕西西安710089
摘要:导航系统仿真是飞行模拟器航电仿真系统的重要组成部分,而进场着陆导航又是导航系统仿真中最复杂的一部分。关于航线导航仿真,已经有许多可行的方法,本文重点研究飞行模拟器进场着陆时的导航仿真方式,并建立相应的导航仿真模型,实现进场着陆导航仿真。
关键词:飞行模拟器;导航仿真;罗盘;塔康;微波;自主导航;进场;着陆
1引言
飞机进场着陆导航仿真是导航系统仿真的重要组成部分。相对于航线导航,进场着陆对导航系统提出了更高的要求,在水平和垂直方向,需分别为飞行员提供精确的方位信息和高度信息[1]。
飞机进场过程可分为两个阶段:进入最终进场点(FAF)和对准跑道(RWY)。在FAF阶段,可选择自主导航、罗盘或塔康导航等方式;在RWY阶段,可选择自主导航、微波着陆设备或塔康导航等方式。飞机准备进场着陆时,飞行员选择要降落的机场及导航方式,根据导航系统的指示飞到机场附近,完成第一阶段后切入RWY,然后对准跑道,最后完成降落。
模拟飞机进场着陆导航时,首先要建立机场导航数据库,实现对机场导航台站、跑道参数的抽象化表示;其次,针对进场着陆的各个阶段建立导航模型,输出相应导航、引导信息;最后,将相应导航模型组合,生成导航仿真软件,读取机场数据库信息和飞机位置、姿态信息,解算出导航指令,引导飞机着陆。
导航仿真软件与座舱模拟系统、飞行仿真系统、视景显示系统交联,可逼真模拟飞机进场着陆导航过程。
2机场数据库
机场数据库包括跑道信息、机场导航台信息以及机场信息,不含跑道灯光及其它机场标志。其中,跑道信息包括:跑道号、经纬度、高度、航向、允许降落标志、微波ID、塔康ID、罗盘远近台ID、FAF经纬度、FAF半径等;机场导航台信息包括:导航台ID、经纬度、频率(波道)、莫尔斯码、导航台类型、发射功率等;机场信息包括:机场号、机场名称、跑道号等。
建立机场数据库时,最关键的是数据来源问题。若能获得实际的机场数据,则只需按格式填入数据库中,若相关数据缺失,也可根据现有数据计算后得到。比如,已知跑道中心经度、纬度、高度、真航向,转弯速度、坡度,求远台、近台、塔康台、航向台、下滑台的经纬高,也可求解FAF点经纬度和FAF圆半径。
在大地坐标系中,已知一点的经度longi0和纬度lati0以及另一点相对它的距离Dis、方位角α,用公式1)~4)可求得另一点的经度longi1和纬度lati1。

式中,Re为地球半径。
一般地,导航台与跑道的相对位置是确定的,可用上述公式计算出机场导航台的位置参数。FAF点也同理。
转弯半径的计算公式如下:

式中,V为真空速,g为重力加速度,γ为转弯坡度。
查找机场数据库时,先根据机场号找到要降落的机场,然后以跑道号为索引,获取预备降落跑道的详细参数,再以导航台ID为索引,获取导航台的详细参数。
3 FAF阶段
3.1自主导航
自主导航过程示意如图1所示。

图1自主导航过程示意图
图1中,A为FAF点(最后进场起始点),跑道延长线与FAF圆相切。
仿真时,在机场数据库读取FAF点的坐标、FAF圆的半径及跑道航向,求得FAF圆圆心。然后,做一条FAF圆的切线,如图1中CB,该切线方向即为飞机的应飞航向。在飞行过程中,实时解算切入点和应飞航向,飞机依据应飞航向飞到FAF点,完成进场着陆的第一个过程。实际上,跑道左右各有一个FAF圆。
左圆心纬度:

左圆心经度:
式中,Flati是FAF点纬度;Flongi是FAF点经度;RHead是跑道航向;Rf是FAF圆半径;Re是地球半径。
计算右FAF圆圆心时只需对公式中Rf取负。
3.2罗盘导航
无线电罗盘接收导航台的信号,给出所接收导航台的相对方位并输出音频信号。为引导飞机进场,一般在跑道延长线设置两个罗盘台,分别为远台和近台。进场时,先将机上罗盘接收机频率调到远台,根据远台引导向台飞行,飞过远台后,切换到近台,将飞机引导到跑道延长线上。
仿真中,导航参数根据飞机和导航台的位置进行计算。飞机位置参数由飞行仿真软件输出后再经过适当转化;导航台位置在导航数据库中查找。无线电导航仿真时,先搜索导航台,计算距离和方位角,再判断罗盘信号的有效性[2]。
1)斜距

2)方位角
计算飞机与该NDB台站之间的方位角,在模拟座舱进行显示。

式8)~9)中,λ0为飞机经度;λ1为导航台经度;φ0为飞机纬度;φ1为导航台纬度;d为飞机至导航台的距离;θs为导航台方位角,Re为地球半径。其中,式9)仅适用于中纬度地区。
已知导航台方位角θs和飞机航向θc,导航台相对方位角为:

3.3塔康
塔康系统定位原理如图2所示。
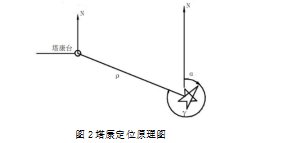
ρ—塔康距离;θ=α+γ—塔康方位;
α—飞机航向;γ—塔康相对方位![]()
![]()
![]()
![]()
塔康仿真与罗盘仿真方法原理相同。不同之处在于塔康可以测位也可以测距,罗盘只有测位功能。
4RWY阶段
4.1自主导航
自主着陆时,导航系统只需从机场数据库中搜索到机场位置及跑道航向并按要求显示在指示器上,给飞行员一个大致的指示信息,飞行员根据导航系统的指示和目视获得的信息着陆。
4.2微波着陆设备
微波着陆机载设备用于引导飞机进场、下滑着陆,为飞行员提供飞机在空中与所选方位角的方位偏差和预选下滑航道的俯仰偏差以及其它有关信息[3]。
1)方位偏差 
2)下滑偏差
下滑偏差=下滑角-选择的下滑角,下滑角可用正切函数求得,选择的下滑角是预设下滑角度。
4.3塔康
着陆时,将塔康磁航线(MCRS)设置为跑道航向,解算出塔康方位及距离。飞行员根据显示器上塔康的指示操控飞机着陆。
5仿真实现
采用模块化的设计思路,设计导航软件的组织结构,如图3所示。

图3仿真软件结构图
使用VS2019与Qt5.12平台编程实现导航软件的导航模型,使用IDATA软件开发了平显、下显显示画面。
6 总结
本文研究了飞机进场着陆过程及导航方式,建立机场数据库及相关导航模型,实现了飞机进场着陆导航系统的仿真。经验证,该模型能够逼真模拟飞机进场着陆导航过程,提供较为真实的飞行训练体验。
参考文献
[1]David Allerton.飞行仿真原理[T].电子工业出版社,2013.
[2] 王勇亮,卢颖,盖永军.WL-5型无线电罗盘仿真系统[C].第五届全国仿真器学术论文集,2004.
[3]吴德伟.无线电导航系统[M].电子工业出版社,2015.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



