民航新疆空中交通管理局气象中心 乌鲁木齐 830000
摘要:风采三维激光测风雷达用于探测机场上空及飞机起降通道低空风场信息,为飞机起降提供短时大气风场信息,以保障飞行安全。本文详细介绍系统的工作原理、产品组成、主要性能和维护方法,为用户日常管理维护提供经验与借鉴。
关键词:风场,激光测风雷达,性能
Style three-dimensional laser wind measurement radar working principle and maintenance
Qishan
(Xinjiang Air Traffic Control Meteorological Center, Urumqi 830000)
Abstract:Fengcai 3D laser wind measurement radar is used to detect the low-altitude wind field information over the airport and the aircraft take-off and landing channel, and provide short-term atmospheric wind field information for aircraft take-off and landing to ensure flight safety. This article details the working principle, product composition, main performance and maintenance methods of the system, and provides experience and reference for users' daily management and maintenance.
Keywords: wind field, laser wind radar, performance
0引言
近年来,我国民航飞机架数和航班量呈爆炸式增长,机场航班密集时段,起降架次时间可达分钟级,且飞机通常进行高速起降,因此对激光测风雷达的实时性要求很高,根据实际需求,激光测风雷达实现了较高的数据刷新率,能够对机场上空的风场变化进行实时监测及预报。
风采三维激光激光测风雷达主要测量雷达最大探测范围内机场上空及周边环境的风场信息,并根据测量数据实时反演出测量空域的风场信息,还可监测600m高度下的风场廓线波动情况,并对飞机安全至关重要的下滑道风场进行实时监测,为飞机起飞及降落提供短时大气风场信息,对危害天气作出预警,以保证飞机的起降飞行安全。该产品在技术指标、软件及硬件的工程化、核心器件的国产化、小型化、环境适应性、安全性、可靠性、数据接口的兼容性等方面具有良好的性能。
1工作原理
大气气溶胶或悬浮微粒的群速度反映了大气风速。基于脉冲激光相干探测技术的激光多普勒测风雷达,是一种利用大气气溶胶对激光散射回波的多普勒频移效应,来间接测量大气风场结构分布的新型光电遥测设备[1]。
激光测风雷达通过接收带有多普勒频移的散射光回波,对其进行光电转换和信号处理,从中检测出多普勒频率,最终计算出激光视线方向上的风速。其物理过程如图1所示。

图1 脉冲激光测风雷达工作原理
激光测风雷达向空中发射激光脉冲,沿脉冲传播途径上的运动粒子会对激光脉冲产生散射效应,同时粒子的运动群速度引起散射光的多普勒频移,激光视线方向的风速与多普勒频移有固定关系:![]() ,其中
,其中![]() 为多普勒频移,
为多普勒频移,![]() 为径向速度,
为径向速度,![]() 为测量激光波长。
为测量激光波长。
为了有效保障飞机的安全起降,激光测风雷达具有风廓线探测模式、扫描探测模式(含RHI、PPI、CAPPI探测模式)、综合扫描模式和飞机起降通道等不同的扫描模式。风廓线扫描模式、PPI模式和飞机起降通道模式具备风切变监测、预警功能,可对严重危害飞机起降的风切变进行预警。
1.1 风廓线探测模式
风廓线探测模式用以测量雷达正上方各高度层的水平风速、水平风向并将所有风层的风矢量按照高度分布进行数据组织,形成测量区域的垂直风廓线数据。
本雷达采用四波来实现波束扫描,并通过DBS算法来反演计算大气风廓线,实现对大气三维风场的探测。四波束DBS扫描原理如图2,假设风场矢量在DBS扫描过程中保持不变,四个激光束发射方向间隔90o,脉冲激光测风雷达直接测量这四个方向上的径向风速。设风矢量为![]() ,在直角坐标系中:
,在直角坐标系中:![]() 沿着
沿着![]() 轴,
轴,![]() 沿着
沿着![]() 轴,
轴,![]() 沿着
沿着![]() 轴,圆锥扫描半角是激光束指向与
轴,圆锥扫描半角是激光束指向与![]() 正轴的夹角,扫描方位角
正轴的夹角,扫描方位角![]() 以
以![]() 坐标正轴为0°起点。则每个径向风速与风向矢量的关系可表示如下[2]:
坐标正轴为0°起点。则每个径向风速与风向矢量的关系可表示如下[2]:
![]() (1)
(1)
设四个方向测得的径向风速分别为![]() ,
,![]() ,
,![]() ,
,![]() ,对应的方位角分别为
,对应的方位角分别为![]() ,
,![]() ,
,![]() ,
,![]() 。
。
 (2)
(2)
假设:四个扫描方位角对准![]() 、
、![]() 、
、![]() 、
、![]() 方向,即
方向,即![]() 、
、![]() 、
、![]() 、
、![]() 分别为0º、90º、180º、270º。
分别为0º、90º、180º、270º。
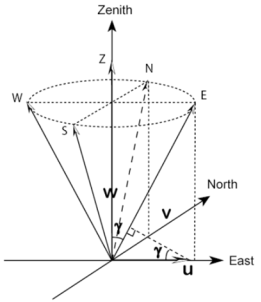
图2 DBS扫描原理示意图
通过化简得到风速数据如下:
 (3)
(3)
其中![]() 的方向为东风为正,
的方向为东风为正,![]() 的方位为北风为正,
的方位为北风为正,![]() 垂直气流向下为正。
垂直气流向下为正。
水平风速VH、水平风向的表达式如下:
 (4)
(4)
在DBS工作模式下,一般可在无飞机起降等情况下工作,数据刷新时间3s-10min可选,即用户可以根据需要分别设置数据平均时间及数据刷新时间。
1.2 扫描探测模式
该工作模式分为:RHI、PPI及CAPPI等,激光测风雷达对机场上空进行最大测量范围内的全方位(有遮挡物的方位除外)或局部区域(如跑道附近或天气系统剖面)扫描,并在显示控制计算机上形成包括RHI、PPI、CAPPI等扫描方式的气象二次数据产品,操作人员可以根据扫描图像对风场波动作出分析、判断及预测。该模式可作为飞机起降前机场上空大范围环流形势的监测和预报[3]。
1.3 距离高度显示(RHI)扫描
RHI为距离高度显示,即雷达以某一固定方位角做俯仰扫描的探测方式,其扫描获取的数据,通常以雷达为坐标原点的极坐标中以不同的色标来显示数据的大小和方向而得到的图像产品,纵坐标是高度,横坐标是水平距离。主要用于显示雷达天线正对某方位以不同的仰角扫描时目标物的垂直剖面图。RHI扫描可以对特定区域或目标物做固定区域的俯仰切片式扫描,以方便了解风场内部垂直结构分布。
1.4平面位置显示(PPI)扫描
PPI即平面回波显示图,指雷达以某一固定仰角,做全方位扫描的探测方式,其扫描获取的数据,通常以雷达为中心的极坐标形势表示,采用不同的彩色色标来表示数据的大小和方向而得到的图像产品。根据仰角的不同,它实际上是在某个锥面上获取的信息。激光测风雷达基本数据产品的平面位置显示PPI包括径向速速度、谱宽、水平风场信息等,产品图像一般还标注有时间、仰角、色标。在实际业务中,可通过PPI产品来分析机场上空及周边流场对应的径向速度分布特征,是实际气象业务中应用最为广泛的产品之一。
1.5CAPPI(等高平面位置显示)扫描反演
CAPPI(等高线平面位置显示),是通过多次仰角渐进的PPI对测量空域做体积扫描,绘制出海平面上不同等高水平面上的风场分布情况。计算机对回波情况进行处理,计算出某一水平高度上的回波,将它在一个平面上显示出来,就是CAPPI图。
2产品组成
2.1设备组成
激光测风雷达主要由雷达主机和上位机两部分组成。图3为雷达主机和上位机的连接示意图。

图3 雷达主机和上位机电缆连接图
雷达主机与上位机之间数据通信及控制采用以太网及RS422通信口连接,分别实现数据通信及扫描平台控制。
雷达主机供电为220V、50Hz电源。
激光测风雷达的功能组成框图如图4所示

图4 激光测风雷达组成框图
2.2总体光路组成
激光测风雷达的总体光路结构方案如图3所示。总体光路主要由激光发射机、相干接收机、收发天线组件组成。激光在光纤中进行传输,各光纤连接处采用光纤熔接方式进行,需要可拆卸的部位,用FC/APC插头连接。
2.3电气系统组成
雷达主机系统电气包括雷达中控计算机、信息处理板、运动控制模块,数据通信传输接口和供电接口等。
2.4软件组成
激光测风雷达的软件部分是雷达系统正常工作的保障,包括雷达主机中的中控软件、高速信息处理板专用软件,以及上位机的控制终端软件及用户终端软件等。主要完成雷达系统的操作、时序控制、数据交换、信息处理与算法、补偿修正、故障诊断、以及输出传输及显示等功能。
软件总体结构分为用户层、服务层、数据层分布式三层结构。
2.4.1 用户层
用户层软件主要包括雷达系统的控制终端软件和用户终端软件。通过与服务层之间的数据交换,实现对雷达系统的控制与测量结果的显示。两个软件可安装运行于一台计算机上,也可通过HUB组网,分别在不同的计算机中运行。该部分软件安装于上位计算机中,操作平台为Windows XP。该层软件主要功能为用户提供雷达操作控制、状态显示、数据显示、存储与回放等功能。
2.4.2服务层
服务层是用户层和数据层之间的中间层,是雷达系统的重要工作软件,负责协调雷达系统中各个部分的正常工作与时序控制,以及算法、通讯接口等。操作平台为Windows XPE嵌入式操作系统。该层软件在激光测风雷达的中控计算机中安装运行。主要功能包括:
a)通过低层接口协议与信息处理板进行数据交换。
b)通过上层接口协议与上位机进行数据交换。
c)扫描稳定伺服参数计算及控制、其他部件的控制与状态查询。
2.4.3 数据层
数据层主要完成对信号进行实时采集、滤波、FFT处理,多普勒频谱计算及扫描球内各模块的通信控制等功能。
2.5产品结构
激光测风雷达主机结构为小型紧凑一体化的二轴扫描转动平台,由扫描球和支撑单元组成。整机高度约800mm,扫描球外径Φ410mm,。图5为激光测风雷达主机外形设计图。

图5激光测风雷达主机外形设计图
扫描球由整体浇铸的球壳、内部的雷达光电组件组成。其中球壳前后各1/3部分可以拆卸,便于装调与维修,前部分半球有一φ107mm保护玻璃窗口,为激光输出窗口,后部分半球上安装有抽气嘴,内部为气密状态。
3主要性能
研制起点高,产品在技术指标、软件及硬件的工程化、核心器件的国产化、小型化、环境适应性、安全性、可靠性、数据接口的兼容性等方面具有良好的性能。
为了满足飞机起降阶段对机场上空风场数据的实时探测需要,激光测风雷达必须要具有较高的探测精度、良好的实时探测能力与高度的可靠性;同时由于高原大气环境的多变,需要激光测风雷达具有较高的探测灵敏度与良好的环境适应性以满足高原复杂多变的天气情况下对风场数据的实时需求。
3.1紧贴民航使用需求的工作模式与数据产品
脉冲体制的激光测风雷达扫描方式及其反演数据产品有多种,采用二维扫描球结构的激光测风雷达,根据使用场合可以在风廓线探测(DBS扫描)、扫描探测(包含RHI、PPI、CAPPI三种模式)、飞机起降通道模式三种不同的模式下工作,还可根据用户需求自定义扫描模式。这四种工作模式相互补充,可获得飞机起降所必须的下滑道侧风、迎头风,风切变指数等,为飞机起降安全提供有力的数据支持,在出现侧风过大,风切变指数大等对飞机起降有危险的大气风场情况时,可立刻进行告警。
3.2高可靠性模块化全光纤相干探测光路设计
为满足上述需求,激光测风雷达整机光学系统采用模块化的设计与全光纤的相干探测光路以实现高可靠性、良好的探测灵敏度与环境适应性。
3.3高效的收发合一光学天线
激光测风雷达采用收发合一的光学天线结构,利用自研的高功率光学环行器实现了收发光路的自洽,减小了光学波前畸变,提高了光学效率,实现了光路的轻量化。
3.4灵敏的控制系统与高效的信号处理系统
通过统一的整机电气接口设计与模块化控制模块设计,实现了激光测风雷达高精度的运动控制、快速数据采集处理及快速风场反演。高精度的控制系统与高速数据处理系统实现了对激光测风雷达的精密控制与高速数据处理,配合系统硬件,能够兼顾近程及远程测量区域数据处理,实现对整个目标空域的精确扫描与风场监测。
3.5良好的热设计
由于高原环境复杂、太阳辐射较强,激光测风雷达容易受到以下热辐射的影响:
a)白天日照强烈时的高强度太阳辐照;
b)机场周围金属设备吸热后又不断释放的热辐射;
c)雷达系统中激光器、信息处理机等发热源。
1
2
2.1
2.2
2.2.1
2.2.2
2.2.3
4设备维护方法
产品在使用维修中的限制和注意事项如下:
a)不要将激光光束直接照射人眼;
b)在观察到激光测风雷达窗口有灰尘、模糊不清等情况时应及时进行清洁。清洁时应先用洗耳球吹去玻璃表面较大的浮尘,再用棉花蘸无水乙醇由中心向外螺旋状轻轻擦拭。
以表格形式显示雷达当前状态和故障信息,如图6所示。

图6雷达状态和故障信息
当状态值超出正常范围时,名字和值列变红。
5小结
随着气象事业的现代化水平快速提升,激光测风雷达为机场气象预报及飞机安全起降提供高精度三维风场信息保障,也为管制人员决策提供空中风场数据支持。本文详细介绍系统的工作原理、主要性能、产品组成、维护方法,为用户日常管理维护提供经验与借鉴。
参考文献
[1] 司方坤,徐健鹏,张希宏.HY-V35 型能见度仪工作原理及安装维护[J].现代农业科技,2015(18):255.
[2]李艳,张鑫,王柏林,等.DNQ1 型能见度仪工作原理及维护实例[J].陕西气象,2016(5):34-36.
[3]朱乐坤,李林.前向散射能见度仪校准技术[J].气象科技,2013,41(16):1003-1007.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



