广东电网有限责任公司惠州供电局 516000
摘要:针对X线手指骨图象轮廓提取与识别问题,对基于乘性、加性噪声的图象进行了提取和识别。这种问题一般都是先对图象轮廓提取和辨识参数进行描述;当轮线上的特征信息被识别时,需要对图象轮廓跟踪系统的设计和实现进行研究,并对轮线的视觉建模进行了深入的研究,并从视觉模型出发,给出了基于图象轮廓的抗干扰跟踪算法;首先进行了梯度转换,然后进行了粗线追踪,然后进行了精确度的跟踪。在高精度轮廓跟踪中,采用多个初始点,克服了多个断点影响轮廓提取的难点。该系统的试验效果良好,并在实际应用中得到了很好的应用。
关键词:识别技术;复杂图象;轮廓提取
在很多场合,利用计算机进行图象的识别,必须先从中提取出复杂的图象,再进行图象的识别。X线影像的各部位图象非常复杂。它的轮廓提取和形态辨识不仅对骨骼年龄的诊断有着重要的作用,同时也对机器视觉有着重要的应用价值。本文以微机骨龄诊断专家系统为例,探讨了手指骨图象的形态和骨龄的分类,介绍了手指骨图象的发育程度,并对其进行了生物医学描述。其次是对各个模块的设计和实现进行了研究。图像的特征和识别参数都是在图像的边缘处。为此,必须对图象轮廓追踪系统进行设计,并对其进行参数抽取和图像识别。并在计算机上进行了测试,经实际调试,取得了较好的效果,并应用于临床应用。
一、指骨图像的特点和发展程度的判别系统的设计
指关节图像的发展水平一般可划分为1-8个级别,最困难的是4-8级。如图1所示,是这些发展等级的指节骨X线成像。

图1
利用计算机对不同发展水平的图像进行识别,必须对图像的识别特性和参数进行分析。本文从指节骨发育程度的生物医学描述出发,提出了各个发展阶段的图像识别特点,并用微型计算机对其进行了识别,见图2。该图还表示了具有明显识别特性和参数的指骨骨图谱,依据图2所示的特征和参数,指骨图象发育程度判别系统需要从图象中提取特征和参数,并对其进行分级识别。识别程序的设计类似于图3。在这个标识里有一个地区的选择单位。这个装置的作用是在手掌X线影像中找到并分离出手指骨区。这个功能相当于一个滑动窗口对图像的操作。指关节骨图象![]() 由手掌X线图象
由手掌X线图象![]() 经窗函数
经窗函数![]() 选出。
选出。

图2
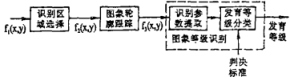
图3
![]() (1)
(1)
窗函数![]() 可以是矩形的
可以是矩形的
![]() (2)
(2)
这里,![]() 是二维矩形函数,
是二维矩形函数,![]() 和
和![]() 为常数。他们给出了窗的位置和尺寸。图像轮廓追踪器提取了骨龄发育水平信息的图像轮廓。这个单元的作用可以用以下方式来表达
为常数。他们给出了窗的位置和尺寸。图像轮廓追踪器提取了骨龄发育水平信息的图像轮廓。这个单元的作用可以用以下方式来表达
![]() (3)
(3)
在这些算法中,![]() 为轮廓线跟踪检测算子,以下将对其进行详细的分析。辨识参数抽取单元从轮廓中抽取出骨龄发展程度的参数。等级分类单元依据分级标准,利用识别参数对指骨影像的发育程度进行识别。全部图像级别标识符提供被识别图像的级别。
为轮廓线跟踪检测算子,以下将对其进行详细的分析。辨识参数抽取单元从轮廓中抽取出骨龄发展程度的参数。等级分类单元依据分级标准,利用识别参数对指骨影像的发育程度进行识别。全部图像级别标识符提供被识别图像的级别。
二、指骨图象轮廓跟踪检测
观察指骨图象![]() 如图1,提取其轮廓线图象
如图1,提取其轮廓线图象![]() 是十分困难的。两个图像的关系如下
是十分困难的。两个图像的关系如下
![]() (4)
(4)
在这些图像中,![]() 是指骨骼的等高线图像。
是指骨骼的等高线图像。![]() 是指骨骼发育水平的信息,是一种灰度水平。由公式(4)可知,具有指骨发育水平信息的轮廓线被严重地扰乱。
是指骨骼发育水平的信息,是一种灰度水平。由公式(4)可知,具有指骨发育水平信息的轮廓线被严重地扰乱。![]() 是颗粒和块状噪音的干扰。
是颗粒和块状噪音的干扰。![]() 表示的是轮廓线的灰度变化,属于乘性噪声的干扰。
表示的是轮廓线的灰度变化,属于乘性噪声的干扰。![]() 表示的是骨骼图像的非等高线。尤其应该指出的是,整个X线片都是手掌的影像,所以,指节骨影像的线缝非常狭窄,例如,它的宽度可以是1到23个像素,并且在空隙处有较低的灰度反差。在这样复杂的情况下,提取轮廓线是一项非常复杂的工作,一般的边缘和轮廓线提取方法难以取得较好的效果。
表示的是骨骼图像的非等高线。尤其应该指出的是,整个X线片都是手掌的影像,所以,指节骨影像的线缝非常狭窄,例如,它的宽度可以是1到23个像素,并且在空隙处有较低的灰度反差。在这样复杂的情况下,提取轮廓线是一项非常复杂的工作,一般的边缘和轮廓线提取方法难以取得较好的效果。
1.指骨图象轮廓视觉模型
图象轮廓追踪是对图像进行追踪和提取轮廓线。所以,检测器应该按照外形的可视模式来设计。可以以下方式来指定手指骨图像轮廓可视模型:
①手指骨轮廓线在其邻近区域发生了剧烈的空间灰度变化。
②轮廓灰度的可视化反差应该大于某个可视阈值![]()
![]() (5)
(5)
③轮廓线是一条连续的曲线,并且它的灰度变化很慢。
④从外观上看,轮廓可以被认为是一个单一的灰色。
2.抗干扰轮廓跟踪器
从指骨图像的原始图形(图1)和它的数学说明(方程式(4)),我们可以看出,为了追踪和提取轮廓,必须要设计一种具有较高抗扰性的轮廓追踪检测器,例如,在图4中,利用梯度检测器将图像映射至梯度区域,极大地消除了慢速的噪音干扰,再利用粗轮廓法对轮廓进行有效的分割,从而减少了不同的噪声干扰。最后,我们采用了精确度追踪法。该方法不仅能消除多种噪声,而且能快速准确地提取图像的轮廓。以下是各个单位的设计。

图4
所述梯度探测装置用于在上述的外形可视模型中实施条件1,在此采用8个三级水平,3x3相邻梯度检测模板,用于检测与方向代码7的梯度值;按照图5中的梯度检测单元进行模板操作,
![]() (
(
6)
i是一个模板序列,i=0,1,2…7是一个模板操作符号。该操作是在模板与图像对齐后,将图像与模板对应像素进行先相乘再相加,并将7个模板操作的最大值取为对应像素的梯度值![]() 。
。
![]() (7)
(7)
如果![]() 则方向码
则方向码
![]() (8)
(8)

图5
粗轮廓提取的主要内容有三个主要内容:视觉反差选取、邻域方向选取、粗轮廓线生成。可视反差选择装置是实施外形可视状况2。这个单元对相邻的可视反差 ![]() 进行了分析。
进行了分析。
![]() (9)
(9)
其中,模板![]() 是一个低通加权模板
是一个低通加权模板
![]() (10)
(10)
![]() 为常数,此单元输出为
为常数,此单元输出为
![]() (11)
(11)
邻域方向选择单元实现视觉条件3,该单元的功能为
![]() (12)
(12)
![]() 为邻近的方向条件,也就是,点
为邻近的方向条件,也就是,点![]() 具有一个先导和一个随后的点,其梯度方向与
具有一个先导和一个随后的点,其梯度方向与![]() 点的梯度方向差不大于
点的梯度方向差不大于![]() 45°的粗轮廓形成单位,而通过轮魔观察状态1,2和3可以形成粗轮廓。
45°的粗轮廓形成单位,而通过轮魔观察状态1,2和3可以形成粗轮廓。
![]() (13)
(13)
粗轮廓提取器可以对轮廓线的大致分布进行检测。通过在粗糙的轮廓区域中找到跟踪轮廓线的初始位置,可以极大地降低噪声和干扰的影响,从而为轮廓的精确提取奠定了基础。
精细轮廓线追踪与抽取是由追踪起始点和轮廓追踪两个部分构成的。通过对原始轮廓进行追踪,得到了轮廓的初始点。可能的起始点用![]() 是一个整数,它的值取决于在提取等值时会在半路中断。追踪起始点
是一个整数,它的值取决于在提取等值时会在半路中断。追踪起始点![]() 具有相应的条件,例如,
具有相应的条件,例如,![]() 的情况可以如下
的情况可以如下
![]() (14)
(14)
其中,![]() 是轮廓线第一个起始点的灰度反差状况
是轮廓线第一个起始点的灰度反差状况
![]() (15)
(15)
![]() 是方向条件
是方向条件
![]() (16)
(16)
![]() 是邻域条件。该条件用于消除由于噪声干扰而产生的虚假初始点,若有邻域
是邻域条件。该条件用于消除由于噪声干扰而产生的虚假初始点,若有邻域![]()
![]() (17)
(17)
则邻域条件![]() ,可以表示为
,可以表示为
![]() (18)
(18)
轮廓线追踪器根据等值线的可视模型,对原始梯度场![]() 、
、![]() 进行跟踪、提取,其算法如下:
进行跟踪、提取,其算法如下:
①从起始点![]() 开始,对下一个邻近的轮廓线进行追踪。
开始,对下一个邻近的轮廓线进行追踪。
②任意一条轮廓线点![]() 的下一条轮廓线在
的下一条轮廓线在![]() 点处的轮廓线指向±45度的三个可能点。
点处的轮廓线指向±45度的三个可能点。
③在三个可能的位置,首先对梯度的大小进行比较,然后选择最大的。
④比较廓线的三个可能点,其与前一轮廓线的方向差不超过士45度。
⑤若轮廓线上的点为![]() ,将轮廓线的灰度
,将轮廓线的灰度![]() 设为
设为![]()
⑥当下面描述的情况![]() 时,重新设置追踪起始点,并接着进行追踪。
时,重新设置追踪起始点,并接着进行追踪。![]() 的条件是:
的条件是:
![]()
![]()
![]()
⑦轮廓线可以追踪和画出轮廓,然后停止追踪。
根据之前设计的图像轮廓追踪器,我们进行了软件的设计和实际的图像测试,结果如图1下所示。实验证明,该图像轮廓追踪系统是非常有效的。
三、图象等级识别器
图像级别判别系统由两部分组成:图像级别判别特征抽取和图像级别分级。前者是通过特征图像来进行辨识的。在本课题中,我们的识别指标包括骨骺和骨骺缝,骨骺宽度 L级别划分单元依据分级标准,将测量到的指骨图像的识别参数进行分级,以判别图像级别。
<基金项目:广东电网有限责任公司职工创新031312KK52220003>
结论:指骨图象发育等级识别器,通过计算机软件的巧妙设计,测量了手指骨图像的样品。通过对计算机图像的分析,得出了与本文所用的计算机图像识别方法相吻合的结论。
参考文献:
[1]李备备,岳峻,贾世祥,等.融合Sobel-SIFT的花朵图像的特征提取方法[J].鲁东大学学报(自然科学版).2019,(4).296-300,317.
[2]黄元元,刘宁钟.一种新的基于颜色特征的图像检索方法[J].小型微型计算机系统.2018,(3).609-613.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



