91718部队70分队 362700
摘要:在科技更新换代极快的时代背景下,移相器的种类越来越多。为使四位铁氧体不可逆数字式波导移相器得到更加广泛的应用与推广,研究以探讨该设备的驱动电路及控制方法为主,围绕驱动电路D1N型场效应管V1-V8,储能电容C1与四位数字式铁氧体移相器F。从技术层面来明确四位铁氧体不可逆数字式波导移相器驱动电路的原理,提出更加科学、有效的移相器控制方法,凸显此类新型设备良好的技术性能,为相关研究提供理论性依据。
关键词:四位铁氧体;不可逆;数字式波导移相器;驱动电路;控制
在移相器驱动电路不断创新研发的道路上,研发出了更加先进的新型设备,名为四位铁氧体不可逆数字式波导移相器,这种设备的驱动电路特点是D18只N型场效应管V1、V2、V3、V4、V5、V6、V7及V8,D1共有8个输出端口与8只N刑场效应管对应。研究结合该设备的技术背景来探讨新型驱动电路的原理,通过了解四位铁氧体不可逆数字式波导移相器在技术层面的内容,并围绕控制方法进行研究,为该设备的实际应用提供依据,使相关行业在运用四位铁氧体不可逆数字式波导移相器时,能够充分结合该设备驱动电路的特征来运用合理、规范,且具备科学性的控制方法来实现对新型科技设备的有效运用,以此来丰富相关研究理论。
一、技术背景
为实现对相控阵雷达的有效控制,使相控阵雷达的电控开关及天线单元能够实现科学化运行,在四位铁氧体不可逆数字式波导移相器驱动电路及控制方法的研究中,要结合铁氧体移相器相位转换时间长的技术特点,基于其在相位转换中的微妙量级处来体现在C与S波段中铁氧体移相器能够扩大雷达盲区范围的技术性能。这种新型移相器与传统设备相比,能够以分段激励的方式在短时间内加大电路占用面积,使其覆盖面不断拓展,并实现对多个段落的同时复位,精准置位多个目标相位,从而降低控制功耗,以实现节能化运行,这种控制方式不仅能够提高移相器运行效率,还能起到节能环保的作用。
二、四位铁氧体不可逆数字式波导移相器驱动电路原理
在移相器设备的创新升级中,专家学者们都以设计出相位转换时间更短且运行功耗更低的新型设备为主。因此,国内外专业研究团队通过整合数字化、智能化等多种先进技术,提出了数字式移相器的概念,并在此基础上研发出了四位铁氧体不可逆数字式波导移相器,这种设备的驱动电路就是以低功耗、高效能的运行标准而设计。为使整个数字式波导移相器的性能得到提升,在其驱动电路的设计中,结合了D1.8只N型场效应管和1只储能电容C1与四位数字式铁氧体移相器E,通过多种先进设备的结合来构建更加先进的移相器驱动电路。同时,还选取了4个N型场效应管来驱动四位数字式铁氧体移相器四个置位端与复位端,确保整个驱动电路在体现相控阵雷达中的控制,能够以置位与复位同时相位转移的方式来驱动相关设备的运行[1]。这种驱动原理的意义就在于改变移相器运行的方式,以复位、置位等多种相位同时改变的形式来实现对移相段的有效激励,这种方式能够改变传统移相器运行中耗时与耗能较长的问题,无需通过时间的间断来实现置位与复位,而是可以采取连续性驱动的方式同时完成置位与复位的运作工序,不会出现时间占用过多的情况,这种驱动方式能够提高设备运行的工作效率,体现四位铁氧体不可逆数字式波导移相器在相控阵雷达中高效率、高质量、高水平的效能,通过缩短相位转换的时间,实现对驱动功耗的降低,开创出新的移相器运行方式[2]。
三、四位铁氧体不可逆数字式波导移相器驱动电路的控制方法
为实现对四位铁氧体不可逆数字式波导移相器驱动电路的有效控制,研究围绕该设备的驱动电路图进行针对性分析,以此来明确该电路在控制中的重点和难点,具体可见下图1。
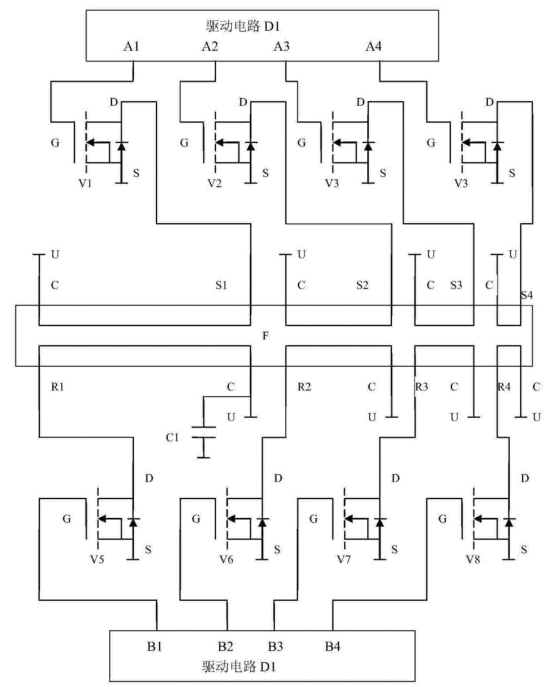
图1 四位铁氧体不可逆数字式波导移相器驱动电路图
结合图1中该电路的分布来看,D1中的8个N型场效应管是整个电力运行的重要节点,其与储能电容及四位数字式铁氧体移相器相连接,以形成以中闭环架构的方式来实现对电能的有效传输。主要是从驱动电路D1来对8只N型场效应管进行驱动,使其与8个输出端口项连接,以驱动电能的形式来通过多个N型场效应管进行传输[3]。再经由四位数字式铁氧体移相器对驱动电路的处理,结合其置位与复位的端口来与公共端进行连接,4个置位端与4个复位端分别对应合适的N型场效应管,以此做到端口与效应管直接连接,实现与驱动电路D1的间接连接,随后将8个公共端与电源项连接,再将8个N型场效应管与源极进行接地连接,最后以储能电容正极接电源,负极接地的方式来形成一个完整的移相器驱动电路。在控制中,主要是结合与复位端、置位端相连接的N型场效应管进行驱动为主,首先是第置位端进行驱动,以V1、V2、V3、V4为准来与职位段的S1、S2、S3、S4分别对应,再根据:V5、V6、V7、V8与复位端的R1、R2、R3、R4对应来实现对四位数字式铁氧体移相器复位端接口的驱动
[4]。
通过对应接口驱动点位的连接,再经驱动电路D1依托输出端口来对多个N型场效应管发送脉冲,使整个四位铁氧体不可逆数字式波导移相器中出现激励电流,结合该移相器的特点,需以四位二进制数SO体现为该设备的相位值,再依托于四位二进制数S1,将其视为整个四位铁氧体不可逆数字式波导移相器目标相位值,将S1传输到D1中,D1就能基于SO与S1数值进行计算,选取合适的输出端口来发送脉冲,在数值的计算中针对A1、A2、A3与A4的端口计算是以(S0^S1)&S1为准;针对B1、B2、B3与B4的计算则是以(S0S1)&S0为准,这两种计算方式的^代表异,性质与&相同,均为逻辑运算符号。总的来说,在四位铁氧体不可逆数字式波导移相器驱动电路的控制中,一定要结合各端口的连接,在公共端口与复位、置位等端口连接的同时,还需将复位与置位的端口与对应的N型场效应管相连接,以确保从D1电路中产生的激励电流能够传输到对应的相位中来实现相位转换,只有是整个驱动电路各端口做到有效连接,以形成完整的电路系统,才能提高四位铁氧体不可逆数字式波导移相器驱动电路的控制效率及质量水平[5]。
结语:
结合上述研究分析来看,在数字化、信息化及智能化等技术大力推广的背景下,为推动移相器技术性能的提高,专家学者们结合了多项先进技术研发了四位铁氧体不可逆数字式波导移相器,这种数字式移相器的作用明显,其驱动电路与传统的移相器存在明显差异,整体在技术层面做了全方位的创新。为使该设备在实际应用中充分发挥自身的效能与作用,研究基于四位铁氧体不可逆数字式波导移相器驱动电路特征,选取合适的控制方法来确保设备运行中能够更加准确的读取有关数据信息,实现对体现相控阵雷达的有效控制。
参考文献:
[1]江承财,高昌杰,余增强,张勇,张小虎,云龙,杨卓.一种可编程的铁氧体幅相调制器控制电路的实现方法[P].陕西省:CN109379316B,2021-06-08.
[2]汤宁生,宋国栋,唐绩.四位数字式铁氧体移相器驱动电路及控制方法[P].江苏:CN107994881A,2018-05-04.
[3]高昌杰.X+Ku波段超宽带铁氧体移相器的仿真设计[J].火控雷达技术,2020,49(03):68-71+75.
[4]张赟,金杰.基于BST薄膜移相器的双频相控阵天线[J].南开大学学报(自然科学版),2020,53(03):25-28.
[5]吴彦柏.某型引进全高度雷达波导移相器修复探讨[J].航空维修与工程,2019(10):60-62.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



