1.中冶武勘工程技术有限公司 湖北 武汉 430000
摘要:本文结合鄂州花湖机场净空保护区障碍物测量这一工程项目,针对障碍物测量工作的难点,运用机载激光雷达与传统测量方式进行对比分析。采用机载激光雷达技术能够将工作效率大幅提升,数据可靠、准确性高,对于飞行安全提供有力保障。
关键词:前方交会、三角高程;机载激光雷达;障碍物测量
1机场净空障碍物测量重要性
随着我国航空事业的快速发展,飞行安全问题越来越受到人们的关注。在有限的空域内一旦设置出现哪怕是细小的问题,都将影响到航空飞行器的飞行安全。而准确现势的空域飞行障碍物图作为机场飞行管理使用手册重要内容,关系到机场空域飞行器航路的精密设置,对于飞行安全尤显重要[1]。正是基于安全方面的考虑,在鄂州花湖机场即将进入商业运行前,必须对该机场周围55km半径范围内进行障碍物测量,提供准确的障碍物点位坐标并绘制障碍物分布影像图,保障机场跑道的飞行安全,并按时投入运营。
根据《民用机场飞行区技术标准(MH 5001-2013)》中的相关规定,通过一系列障碍物限制面,限制了物体超出空域的界限范围。本文测量的机场限制面包含了进近面、起飞爬升面、锥型面、内水平面、过渡面和跑道升降带,如图 1 所示[1,2]。除跑道升降带和内水平面为水平面外,其余限制面均为坡度上升面或者是坡度上升面与水平面相结合的限制面[1,2]。因此,不同限制面对障碍物的限高要求也随着坡度的变化而变化。

图1机场限制面示意图
除了对限制面以内的超高障碍物测量外,还需对机场障碍物限制面以外,对主要障碍物高出地面标高30m且高出机场标高150m的物体进行位置和高程测量。该区域范围大,障碍物的分布和类型具有不确定性,给测量作业带来很大的困难。
2机场净空障碍物测量传统作业模式
2.1全站仪结合CORS-RTK技术
机场净空保护区障碍物测量需要确定障碍物所处的位置及高程,需测量障碍物最高点处对应的平面坐标及高程值。平面坐标系为当地的城市坐标系,高程坐标系采用国家1985高程系。障碍物的平面坐标可以通过CORS-RTK技术直接测量。障碍物的高程测量分为以下两种情况:1)对于反射强度高的障碍物可以采取全站仪免棱镜方式测量,首先CORS-RTK测量临时控制点的高程值![]() ,其次量取全站仪仪器高
,其次量取全站仪仪器高![]() ,最后通过全站仪免棱镜测量仪器中心到障碍物最高点的高差值
,最后通过全站仪免棱镜测量仪器中心到障碍物最高点的高差值![]() ,三者相加即可得出障碍物的高程值
,三者相加即可得出障碍物的高程值![]() ,如下列公式(1)所示。
,如下列公式(1)所示。
![]() (1)
(1)
2)对于反射强度低的障碍物,与1)中方法类似利用全站仪悬高测量测出障碍物反射点到顶部的高差值![]() ,四者相加即可得出障碍物的高程值,如下列公式(2)所示。
,四者相加即可得出障碍物的高程值,如下列公式(2)所示。
![]() (2)
(2)
2.2前方交会、三角高程方法
对于高山及较困难接近的高压塔、信号塔、避雷针、树木等物体,直接测量法则不适用。宜采用前方交会、三角高程方法测量,需要选取三个能与障碍物最高点通视的临时控制点,测出三点平面坐标及高程,以及点与点之间的角度关系,经过相关计算,间接测量障碍物的平面坐标与高程。
2.2.1方位角前方交会
首先利用CORS-RTK测量控制点A、B、C的平面坐标及高程![]() ,其次通过全站仪测量∠PAB、∠PBA、∠PBC、∠PCB的水平角,如图2所示。根据坐标反算公式(3)计算方位角αAB,αBC,通过方位角αAB,αBC与水平角∠PAB、∠PBA、∠PBC、∠PCB计算出方位角αAP、αBP、αCP。在计算方位角αAP、αBP、αCP时需注意三角形的形状和点位A、B、P或B、C、P的排列顺序。利用方位角前方交会即可计算出P点的两个坐标值
,其次通过全站仪测量∠PAB、∠PBA、∠PBC、∠PCB的水平角,如图2所示。根据坐标反算公式(3)计算方位角αAB,αBC,通过方位角αAB,αBC与水平角∠PAB、∠PBA、∠PBC、∠PCB计算出方位角αAP、αBP、αCP。在计算方位角αAP、αBP、αCP时需注意三角形的形状和点位A、B、P或B、C、P的排列顺序。利用方位角前方交会即可计算出P点的两个坐标值![]() 、
、![]() ,取坐标平均值作为P点的最终平面坐标
,取坐标平均值作为P点的最终平面坐标![]() ,如下列公式(4)、(5)、(6)所示。
,如下列公式(4)、(5)、(6)所示。
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)

图2方位角前方交会
2.2.2三角高程测量
根据2.2.1中P点坐标![]() 与控制点A、B、C的坐标
与控制点A、B、C的坐标![]() 计算点A、B、C到点P的水平距离
计算点A、B、C到点P的水平距离![]() ,如公式(7)所示。通过全站仪测量天顶角
,如公式(7)所示。通过全站仪测量天顶角![]() ,分别量取仪器高
,分别量取仪器高![]() ,如图3所示。利用三角高程公式计算出仪器中心到P点的高差,加上仪器高以及控制点高程即可得P点三个高程值,取高程平均数作为P点最终高程
,如图3所示。利用三角高程公式计算出仪器中心到P点的高差,加上仪器高以及控制点高程即可得P点三个高程值,取高程平均数作为P点最终高程![]() ,如公式(6)所示。
,如公式(6)所示。
 (5)
(5)
 (6)
(6)
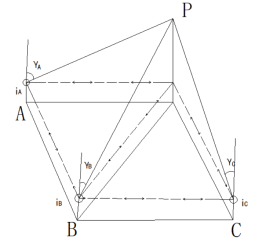
图3三角高程测量
3机场净空保护区障碍物无人机载激光雷达测量
机载雷达点云数据由不同集成仪器提供,同步获取点云数据信息并完成提取和内插[4,5]。处理数据分为四个步骤:1)确定飞行航迹。 将地面GPS基准站和机载雷达测量数据进行联合计算,得到精确飞行航迹。2)确定激光点三维坐标。将获取POS数据、激光扫描数据、地面GPS基站数据进行处理,可将每个激光脚点三维空间坐标(X,Y,Z)精确计算出。3)去噪并剔除异常值,在采集数据时,机载激光雷达会使采集数据产生异常值,须去噪并将异常值剔除。4)对所获取的点云数据滤波分类,即以地物性质、类型、应用为标准,分离不同目标物上的激光点,方便分类、识别,减少计算占用的资源空间,满足对象识别、特征提取等需求。 通过航带拼接及坐标转换,根据分类、滤波获得的地面点,生成数字高程模型(DEM)和数字地表面模型(DSM)。 图4为机载激光雷达数据处理流程图。

图4机载激光雷达数据处理流程图
建立类表文件,设置软件中各类点云显示颜色。在消除冗余时将冗余点归入航带重叠点中,飞点、噪音点、低点归入噪声点,地面点归入裸露地面点,大型桥梁等架空物归入架空构筑物点,其他非地面点如不做详细分类归入未分类点。如果滤波的方法需要先将低、中、高植被层滤出,可以自行添加对应的点类。
基于MicroStation+TerraSolid软件,建立工程,通过自动宏命令,分离出地面点。点云分类不完全或不正确会导致地形高程的陡升或陡降。利用去除高程异常点算法,将导致地形陡升的激光点从地面点去除,导致地形陡降的激光点分类为地面点,从而保证地面的完整连续性。该功能主要通过IsolatedPoints分类方式来实现。其原理是根据点的密度来实现剔除功能。
自动分类完成后,部分建筑点、植被点错分为地面点,使用线上分类、线下分类、多边形分类工具归入非地面点数据。
通过软件设置限制面高度,超过限制面的建构筑物会自动显示出不同的颜色,通过量取超出限制面的最高点的点云数据,获取障碍物的高程和位置坐标。如下图所示:图5点云分类俯视图 、图6植被剖面图、图7高压塔及线路点云处理后倾斜影像拼接图。
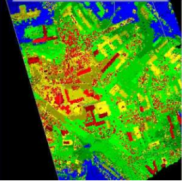
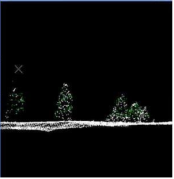
图5点云分类俯视图 图6为植被剖面图

图7高压塔及线路点云处理后倾斜影像拼接图
4算例分析
为了验证机载激光雷达技术在机场净空保护区障碍物测量的精度,本文采用CORS-RTK结合全站仪免棱镜模式测量、免棱镜悬高测量、前方交会与三角高程测量、机载激光雷达技术四种方式对同一高压铁塔、房屋进行了测量,多种测量方式平面坐标误差小于10cm,高程误差小于10cm,满足相关精度要求,数据对比分析如下表1所示。
表1四种测量方式对比分析表
测量方式 | 地物 | 平面坐标x(m) | 平面坐标y(m) | 高程(m) |
CORS-RTK+全站仪免棱镜 | 高压 铁塔 | ****072.288 | ***634.543 | 67.239 |
CORS-RTK+全站仪免棱镜悬高测量 | ****072.286 | ***634.544 | 67.233 | |
CORS-RTK+前方交会与三角高程测量 | ****072.245 | ***634.519 | 67.252 | |
无人机载激光雷达 | ****072.213 | ***634.484 | 67.175 | |
最大较差 | 0.075 | 0.060 | 0.077 | |
CORS-RTK+全站仪免棱镜 | 房屋 | ****211.481 | ***218.665 | 158.751 |
CORS-RTK+全站仪免棱镜悬高测量 | ****211.481 | ***218.665 | 158.748 | |
CORS-RTK+前方交会与三角高程测量 | ****211.516 | ***218.631 | 158.698 | |
无人机载激光雷达 | ****211.424 | ***218.712 | 158.688 | |
最大较差 | 0.092 | 0.081 | 0.063 |
5测绘新技术及其优势
按照传统作业模式,需采用地毯式排查的方法对测区超高障碍物进行标记与量测,这种方法会消耗大量的时间和人力,且常会因为判断错误导致重复工作。本文从对超高障碍物的认定出发,明确障碍物的特征点,运用无人机载激光雷达测量技术获取障碍物的平面位置和高程。
第一,提高测量数据的精准性,引用无人机载激光雷达可以满足对数据化的控制,为数据精准性提供一定保障,减少人为操作所带来的误差,通过运用计算机等设备可以对误差进行合理把控,将整个项目质量提高。
第二,操作更加便捷,可以直接运用无人机载激光雷达测量获取到的数据进行解析,及时开展处理工作,还能直观且具体展现出测量结果,为设计师提供项目设计参考依据,操作更加便捷,测量的数据更加明确,有利于后期飞行程序设计的顺利开展。
第三,采用无人机载激光雷达测量可以轻松进入很多山区等人不能轻易到达的区域,大大减少工作强度。通过无人机全面数据采集,可以准确全面的采集全部数据信息,避免了数据遗漏。
6结束语
通过前期对障碍物的分析认定,运用合理的测量技术,在减少外业测量工作的基础上,获得了符合精度要求的数据成果,这对机场飞行程序设计和飞行安全具有重要意义。本次障碍物测量的范围较广,种类较齐全,测量中充分利用了已有资料,综合运用航空摄影测量和三维激光雷达、全野外数字化采集测量技术,为将来类似障碍物测量的开展提供借鉴。
参考文献
[1] MH 5001-2006,民用机场飞行区技术标准[S].
[2] 安治国, 黄曲红, 陈金龙,等. 机场净空区障碍物测量方法与精度分析[J]. 测绘地理信息, 2016, 41(1):4.
[3] 盛昀, 方学东. 机场净空保护区障碍物超限评价方法研究[J]. 中国民航飞行学院学报, 2019, 030(001):72-76,80.
[4] 李峰, 崔希民, 刘小阳,等. 机载LiDAR点云提取城市道路网的半自动方法[J]. 测绘科学, 2015, 40(2):5.
[5] 徐祖舰, 王滋政, 阳 锋.机载激光雷达测量技术及工程应用实践[ M] .武汉:武汉大学出版社, 2009.
[6] Brfuss K , Schulz-Stellenfleth J , Lampert A . The Impact of Offshore Wind Farms on Sea State Demonstrated by Airborne LiDAR Measurements[J]. Multidisciplinary Digital Publishing Institute, 2021(6).
[7] 张小红.机载激光雷达测量技术理论与方法[ M] .武汉:武汉大学出版社, 2007
[8] 皮青山. 机载激光雷达测量系统及点云数据快速处理技术[D]. 山东科技大学, 2011.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



