湖南汽车工程职业学院
湖南株洲,412001
作者:胥刚,1987年3月,男,湖南株洲,硕士研究生,研究方向:智能交通与应用研究,412000,湖南汽车工程职业学院,湖南省株洲市云龙示范区智慧路79号
课题:湖南汽车工程职业学院院级科学研究课题:基于滑模控制的四旋翼人机轨迹跟踪控制研究(编号:HQZYKY2021B03)
摘要:四旋翼无人机不仅结构简单、成本低,操作起来也很简单,使其成为应用最为广泛的旋翼飞行器。同时,四旋翼无人机飞行的稳定性和安全性成为四旋翼无人机控制系统设计的首要性能考核指标,其多输入多输出、非线性特性以及各状态量之间具有强耦合关系是进行控制系统设计时的难点。本文针对四旋翼无人机在外部扰动和变载荷情况下的轨迹跟踪控制问题,对无人机的控制系统进行研究与设计,选用滑模控制方法作为控制器设计的基础,同时结合观测器和分数阶理论进行混合控制,改善单一控制方法的缺陷,提高位置、姿态跟踪的精确性。
关键词:四旋翼无人机;多环境测试
一、研究背景
无人机应用在较多领域,而且无人机可以用在消防和救援等方面,无人机在进行飞行的时候,会受到外界环境因素的影响,使无人机无法正常飞行,在无人机飞行的环境中,会存在一些阴雨天气,还会出现一些大风天气,一般都是直接将无人机在这种环境中进行试飞,但是飞行的过程中如果无人机出现失控或者飞行不平稳,将会使得无人机无法正常操作,从而就会使得无人机出现碰撞或者下落,影响无人机的正常使用,而现有的不易模拟不同的飞行环境,从而影响对无人机的直观测试。
四旋翼无人机在飞行过程中容易受到各种各样的干扰,如不可预测的风扰以及测量端噪声等的影响,进而有可能导致姿态控制系统发生故障,这将对整个四旋翼无人机的稳定性造成影响,甚至导致坠机而使整个飞行任务失败。
严苛的工作环境以及四旋翼无人机系统自身的特性,决定了控制系统稳定性设计具有重要地位。设计合理的控制器使四旋翼无人机稳定飞行,同时降低干扰对四旋翼无人机的影响一直是进行飞行控制系统设计的关键问题。本文从无人机多环境测试装置来解决无人机飞行环境的测试问题。
二、研究内容
1、结构
无人机多环境测试装置结构如图1所示,包括底板,底板上表面后侧固定安装有挡风板,底板上表面两端对称安装有支撑杆,支撑杆顶端固定安装有支撑环,支撑环内部固定套装有电机,电机后面安装有转盘,转盘之间连接有传送带,传送带表面均匀套装有气囊,传送带外套有罩环,罩环上侧固定连接有拉绳,拉绳顶端固定连接有安装板,底板上表面右侧固定安装有导向架。
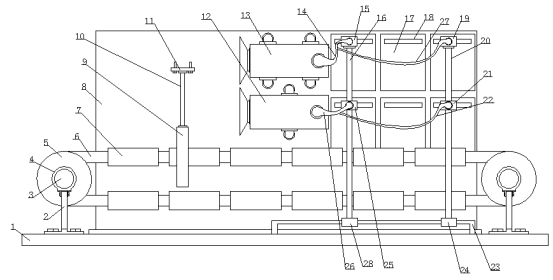
(图中:1、底板,2、支撑杆,3、电机,4、支撑环,5、转盘,6、传送带,7、气囊,8、挡风板,9、罩环,10、拉绳,11、安装板,12、物料泵,13、风机,14、第一连接管,15、第一连接块,16、第一滑杆,17、储料箱,18、通槽,19、第二连接块,20、第二滑杆,21、第三连接块,22、第二连接管,23、导向架,24、第一滑环,25、第四连接块,26、第三连接管,27、第四连接管,28、第二滑环)
图1 测试系统结构
2、系统技术方案
基于滑模控制的四旋翼无人机多环境测试系统,包括底板,所述底板上表面后侧固定安装有挡风板,所述底板上表面两端对称安装有支撑杆,所述支撑杆顶端固定安装有支撑环,所述支撑环内部固定套装有电机,所述电机后面安装有转盘,所述转盘之间连接有传送带,所述传送带表面均匀套装有气囊,所述传送带外套有罩环,所述罩环上侧固定连接有拉绳,所述拉绳顶端固定连接有安装板,所述底板上表面右侧固定安装有导向架,所述导向架表面左右两侧套有第二滑环和第一滑环,所述第一滑环上侧固定安装有第二滑杆,所述第二滑杆表面上下分别安装有第二连接块和第三连接块,所述第二滑环上表面固定安装有第一滑杆,所述第一滑杆上下分别安装有第一连接块和第四连接块,所述挡风板表面中部上下分别安装有风机和物料泵,所述风机与第一连接块之间连接有第一连接管,所述第一连接管与第二连接块之间连接有第四连接管,所述物料泵与第四连接块之间连接有第三连接管,所述第三连接管与第三连接块之间连接有第二连接管,所述挡风板表面右侧均匀安装有储料箱,所述储料箱表面上侧开有通槽。
所述传送带为尼龙材料制成,转盘上开有与传送带对应的槽,方便将传送带平稳缠绕在转盘上,传送带的转动,可以更换气囊的位置,使不同大小的气囊穿入罩环内。
所述罩环为环形结构。
所述第一连接块、第二连接块、第三连接块和第四连接块均为空心结构,第一连接块、第二连接块、第三连接块和第四连接块背面均开有与通槽相通的通孔,通槽内装有橡胶条且在橡胶条内开有槽,可以将不同的连接块接通不同的通槽内,可以接通不同的储料箱,以便模拟不同的环境。
所述导向架分别与第一滑环和第二滑环滑动配合,可以对第一滑环和第二滑环的位置进行移动,对第一滑杆和第二滑杆的位置进行调节,接通不同的储料箱组合。
3、工作原理
先在储料箱内装入不同的物料,可以装入水、冰块和加热丝等装入不同的储料箱内,通过物料泵喷出水,可以模拟阴雨天气的环境,通过风机吹风的调节,可以模拟大风天气,通过加热丝以及风机的配合,可以吹出热风,模拟高温天气,当然还可以在储料箱内装入其他物质,可以模拟不同的环境,将安装板安装在无人机上,并且对气囊进行充气,使不同的气囊充气量不同,从而可以使不同的气囊膨胀量不同,而罩环是罩在气囊外的,无人机进行飞行的时候,可以带动罩环在气囊外晃动,同时将物料泵和风机的开关打开,对无人机进行不同环境的模拟,观察无人机在不同环境下的平稳性,就是观察无人机带动罩环的晃动情况,可以直观得知无人机在不同环境下的飞行情况。
4、系统实施效果
四旋翼无人机轨迹跟踪控制研究,其关键环节就是外部干扰情况下的四旋翼无人机轨迹跟踪问题,如果控制器逻辑和模型不合理,会影响无人机轨迹跟踪精度,也会因外部干扰引起的稳态误差。滑模控制理论和数值分析是整个项目顺利进行的基础,如果模拟结果与实际结果吻合不理想,不但会导致后面的试验缺乏理论依据,更会让整个项目无法正常进行。变载荷下的自适应分数阶滑模控制器设计与仿真研究:研究增加变载荷四旋翼无人机轨迹跟踪影响因素,将四旋翼无人机分为位置子系统(水平位置跟踪控制器和高度控制器)和姿态子系统控制器(分数阶滑模控制器)。
本系统通过设置多个储料箱,再结合风机和物料泵的配合,可以制造不同的环境,模拟无人机飞行的不同环境,可以直观得知无人机在不同环境下的飞行情况,通过将罩环套在气囊外,再通过安装板安装在无人机上,可以起到了对无人机的牵引作用,通过罩环与气囊之间的相对运动,可以直观看出无人机飞行的稳定性,通过第一滑环和第二滑环在导向架上的滑动,可以对不同的储料箱进行组合使用,以便模拟不同的环境。本系统通过对无人机进行牵引,观察罩环的波动情况,就可以直观得知无人机飞行的平稳性,同时还可以模拟不同的飞行环境,得知飞行环境对无人机的影响。
三、总结
本文从无人机多环境测试装置来解决无人机飞行环境的测试问题,研究基于滑模控制的轨迹控制研究一种稳健、可靠的飞行控制装置,保证四旋翼无人机能够平稳地、具有较强的自适应能力、快速灵活地飞行,具有重要的理论研究意义和实际应用价值
参考文献
[1]周齐贤,王寅,孙学安.基于增益自适应超螺旋滑模理论的无人机控制[J/OL].上海交通大学学报:1-8[2022-09-27].DOI:10.16183/j.cnki.jsjtu.2022.238.
[2]鞠爽,王晶,窦立亚,顾维博.基于滑模的多无人机系统协同编队控制[J/OL].导航定位与授时:1-14[2022-09-27].http://kns.cnki.net/kcms/detail/10.1226.V.20220906.1614.018.html
[3]梅平,张豪,朱涵智,苏东彦,赵迅.基于奇异摄动分解的固定翼无人机抗扰动滑模控制[J/OL].南京信息工程大学学报(自然科学版):1-14[2022-09-27].http://kns.cnki.net/kcms/detail/32.1801.n.20220818.1715.006.html
[4]李欣. 四旋翼无人机姿态控制系统的分数阶终端滑模设计方法[D].内蒙古大学,2022.DOI:10.27224/d.cnki.gnmdu.2022.001362.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



