中国船舶集团公司第七一〇研究所,湖北 宜昌 443003
摘要:传统的ROV(带缆水下机器人)采用集中控制方式,ROV的所有信号采集和设备控制均由中央控制单元完成。该方式存在以下几个问题:执行机构抗干扰性能差;控制系统软、硬件设计复杂;系统可靠性低。采用分布式数字舵机,通过CAN总线与控制系统进行组网,简化了控制系统的软、硬件设计,提高了系统的可靠性和实时性。本文介绍了分布式数字舵机设计,舵机CAN通信组网设计,深度控制算法设计。通过湖上试验表明,基于分布式数字舵机的ROV高速航行时姿态稳定、深度保持效果好,可有效克服尾部电缆对ROV载体的扰动。该设计对ROV的工程化设计具有较大参考价值。
关键词: ROV;中央控制单元;分布式数字舵机;CAN通信
0、引 言
ROV(带缆水下机器人)控制的难点在于怎样将尾部脐带电缆对ROV运动控制的干扰降到最小,特别是在海洋环境中,由于海流方向和流速的不断变化,尾部电缆对潜航体的尾部拉力的大小和方向也在不停变化,给潜航体的姿态控制、深度控制、航向控制都带来较大难度。为了解决这些问题,在ROV尾部安装一套水平舵机,与ROV左右垂向电机配合可有效保证深度控制效果,同时兼顾ROV的姿态控制。水平舵机控制器采用单片机加外围扩展电路设计方式,采用CAN通信与中央控制器进行通信,中央控制单元将计算出的舵角发送给舵机,舵机根据接收到的舵角进行动作,同时将舵机的状态信息发送给中央控制单元。采用分布式数字舵机能够简化ROV控制系统软、硬件设计工作,提高系统可靠性,并能改善ROV高速航行时深度控制效果,同时保证ROV航行时载体姿态平稳。
1、分布式数字舵机设计
传统ROV的模拟舵机由中央控制单元统一进行控制,中央控制单元要同时兼顾舵机的信号采集和控制,导致舵机控制的实时性不能得到保证;而且舵机与中央控制单元的距离较远,舵机的模拟信号在传输时容易受到ROV内部电磁环境的干扰。分布式数字舵机自带CPU模块和各种扩展电路,信号采集和舵角控制均由自身完成,舵机电路安装在一个独立的屏蔽箱体内部,舵机控制器采用CAN总线与中央控制单元通信,设备抗干扰能力强,控制系统软、硬件设计较为简化。舵机控制器部分电路如1、图2所示。
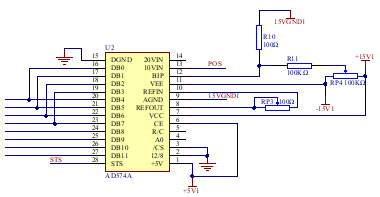
图1 A/D采集电路原理图

图2 舵机控制电路原理图
2、分布式数字舵机的CAN通信组网设计
ROV中传感器众多,各传感器设备与中央控制单元之间多采用CAN或串口进行信息交互;如左右水平推进电机、左右垂向推进电机、水平舵机通过CAN总线与中央控制单元通信;惯性导航装置、北斗接收装置、上下位机通信采用RS232/422进行通信。其中,CAN总线通信组网拓扑图如图3所示。
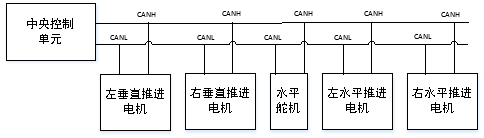
图3CAN总线通信组网拓扑图
在CAN通信中,采用主从工作模式,从节点只有在收到合法的控制指令时,才向主节点发送信息。其中,舵机的通信协议如下。
采用CAN2.0B数据格式。
默认ID号:0x0713(低11位),其中低3位可通过硬件设置。
默认波特率:50kbps。
数据帧的标识码为舵机控制器的节点地址。
(1)操舵命令
操舵命令的正文为5字节,第一个字节为0xAA,为操舵标示字节;第二个字节的低两位为舵机给定字节的高两位,其它为填0;第三个字节为舵机给定角度字节的低8位;第4、5字节为预留字节,都为0。
其中0x0—0x03FF对应角度-51.2—+51.2度。合法目标角度为-30度—+30度,对应操舵帧字节2(字节4)、字节3(字节4)范围为:0x00D4(-30)—0x032C(+30)。指令中目标角度小于-30度时按-30度处理,目标角度大于+30度时,以+30度处理。
舵机接收到操舵指令后,按照操舵命令帧进行操舵动作,并在20ms内向上级控制器反馈当前舵机状态。若上次操舵指令未完成就接收到新的操舵指令,则立即执行新的操舵指令。
(2)状态反馈
第一个字节为反馈标识,0x11;第二个字节的低两位为舵机角度反馈的高两位,其它位为0;第三个字节为舵机角度反馈的低8位;第4、5字节为空,填0;第6字节为舵机故障状态。
其中10位实际角度0x0—0x03FF对应角度-51.2—+51.2度。字节6、字节7中各故障位0为正常,1为故障。
舵机CAN通信的部分代码如下:
/**********CAN初始化*********/
CSD_Open(baseaddr); /*CSD open*/
CSD_CanConfig(can1addr,can2addr,can1irq,can2irq,1); /* CSD can config */
if(CSD_Install(1,can1addr,Can1IRQ,CallBackCan1Fun)==0)
{
cprintf("Can1 install error!");
CSD_Close();
return;
}
can_portstruct.filter=SINGLE;
can_portstruct.lis_on=LOFF;
can_portstruct.test=TOFF;
can_portstruct.sleep=SOFF;
can_portstruct.code1=0x0;
can_portstruct.code2=0x0;
can_portstruct.code3=0x0;
can_portstruct.code4=0x0;
can_portstruct.mask1=0xff;
can_portstruct.mask2=0xff;
can_portstruct.mask3=0xff;
can_portstruct.mask4=0xff;
CSD_CanConfigPort(1,&can_portstruct); /*Can port config*/
CSD_CanEnableIntRcv(1);
CSD_CanClearRxBuffer(1);
/**********CAN数据发送*********/
for(;;)
{
if((send_flag ==1) && (send_flag 1==1)) /*send message*/
{
Sendflag1=0;
can_txmsg.f_pattern=E;
can_txmsg.f_type=D;
can_txmsg.byte_len=FIVE;
can_txmsg.id1=0x07;
can_txmsg.id2=0x13;
can_txmsg.id3=0x00;
can_txmsg.id4=0x00;
can_txmsg.data[0]=0xaa;
can_txmsg.data[1]=rud_angle;
can_txmsg.data[2]=0;
can_txmsg.data[3]=0;
can_txmsg.data[4]=0;
CSD_CanSendMsg(1,&can_txmsg);
}
}
3、深度控制算法设计
深度控制采用双闭环控制,内环俯仰角控制,外环深度控制,在控制深度的同时,控制俯仰角的变化。控制原理框图如图4所示。深度控制器根据给定的航行深度Zs,与深度传感器测得的载体实际航行深度ZT进行比较,结合垂向速度Vz,计算得到一个设定俯仰角![]() ,俯仰角控制器根据设定俯仰角
,俯仰角控制器根据设定俯仰角![]() 与实际俯仰角度θT 、俯仰角加速度ωy信息,给出舵机操舵指令,艉水平舵机控制系统带动艉水平舵转动δe艉,从而操纵载体作俯仰运动,载体向设定深度运动。惯性导航系统和深度传感器检测实际俯仰角度、俯仰角加速度和深度信息反馈给深度控制器和俯仰角控制器,形成闭环控制。
与实际俯仰角度θT 、俯仰角加速度ωy信息,给出舵机操舵指令,艉水平舵机控制系统带动艉水平舵转动δe艉,从而操纵载体作俯仰运动,载体向设定深度运动。惯性导航系统和深度传感器检测实际俯仰角度、俯仰角加速度和深度信息反馈给深度控制器和俯仰角控制器,形成闭环控制。
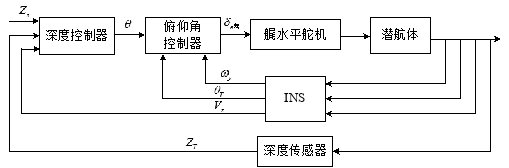
图4 深度控制原理框图
4、试验效果
ROV的深度保持采用水平舵机和垂向推进电机结合的控制方式,在湖上对ROV的运动控制性能进行实航验证,图5为3节航速下的深度保持曲线图,图6为6节航速下的深度保持曲线图,图7为3节航速下深度保持时的载体俯仰姿态曲线变化图。

图5 3节航速下的深度保持曲线图(横坐标:秒,纵坐标:米)

图6 6节航速下的深度保持曲线图(横坐标:秒,纵坐标:米)

图7 3节航速下深度保持时的载体俯仰姿态曲线图(横坐标:秒,纵坐标:度)
通过湖上试验验证表明:采用水平舵机和垂向推进电机结合的方式,ROV深度控制效果良好,且ROV载体姿态稳定。
5、小结
采用CAN总线组网通信的分布式数字舵机简化了控制系统软、硬件设计,提升了系统的模块化程度,提高了ROV的可靠性和控制实时性。采用水平舵机与垂向推进电机结合的方式控制ROV垂向运动,可以有效的克服ROV脐带电缆在水流作用下带来的强烈扰动,可同时保证ROV低速航行和高速航行时的深度控制精度和载体姿态稳定性,解决了脐带电缆扰动造成ROV高速航行姿态不稳定的难题。该设计对ROV的工程设计有重要参考价值。
参考文献:
[1] 罗凯,肖锐钢,秦侃,等.AUV电动舵机伺服控制与驱动研究[J].测控技术,2011,31(10):55-58.
[2] 王茜,严卫生,冯凯.自主式水下航行器舵机控制系统采样校正[J].鱼雷技术,2011,21(3):197-201.
[3] 陈江.AUV垂直面运动控制过程中自抗扰方法研究[D].哈尔滨: 哈尔滨工程大学,2012.
[4] 王小平.X舵A1Ⅳ控制分配优化与容错控制方法研究[D].哈尔滨: 哈尔滨工程大学,2020.
[5] 张瀚文,王俊雄.基于自适应反步滑模的AUV推进器容错控制[J].水下无人系统学报,2021,29(43):420-427.
查智(1981—),男,高级工程师,主要从事水下机器人智能控制研究,28633490@qq.com,18995902966
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



