湖南文理学院 湖南省常德市 415000
摘要:本文主要通过建立纯方位无源定位模型,以解决无人机编队集群在遂行编队飞行时受外界干扰的问题。我们先通过Excel表格分析每架无人机在极坐标的位置信息。再对于所有无人机,通过三角定位原理以及交叉定位模型,先确立圆周上的三架飞机,从而利用第二小问所求的模型调整接收信号的无人机,市值达到精准定位。最后通过无人机与与其接收到的方向信息来判断,无人机应该如何去在同一水平高度,从而进行一个位置的调整。
关键词:三角定位原理;交叉定位模型
模型的建立与求解
1.问题模型的准备
在问题中,已知9架无人机是均匀分布在以无人机FY00为圆心的圆上,位置偏差在合理范围内,那么9架无人机的相对位置是固定的。同时,已知10架无人机均保持在同一高度,那么我们可以将10架无人机视为同一平面上的质点从而构建坐标系进行对模型进行定量分析。
由于接受信号的无人机位置偏差情况的不具体,因此我们根据偏差情况分类讨论从而建立不同的定位模型。首先,以目标圆为参照,接收信号的无人机位置有三种情况,分别是在圆外、在圆内以及在圆上。其次,由于9架无人机在圆上本应该是均匀分布的并且圆上发射信号的无人机可求得坐标,则其余无人机在圆上的目标位置也是确定的点,因此位置偏差的无人机若在圆上,又可分为在目
标点前及目标点后两种情况。
情况分析如下:
∠ADB=α1’,∠BDC=α2’,∠ADC=α3’,
∠AEB=α1,∠BEC=α2,∠AEC=α3
![]()
![]()
由图1-1得:当无人机在圆内时始终有α1>α1’
由图1-2得![]()
:当无人机在圆外时始终有α1<α1’![]()
由图1-3得:
当α2>α2’时,无人机偏离到目标点右侧
故当α1=α1’,α2>α2’时,无人机在圆上向目标点顺时针方向偏移
由图1-4得:
当α2<α2’时,无人机在圆上向目标点逆时针方向偏移,故α1=α1’,α2<α2’时无人机在圆上向目标点逆时针方向偏移
2.问题模型的建立
2.1交叉定位模型的建立
我们视FY02无人机为圆内接九边形的某一点,即FY02无人机位置无偏差。由于FY02,FY05,FY08无人机的坐标均已知,则可以分别求得5号无人机目标点位置和初始状态时接收到的由FY00,FY02,FY08发射的信号![]() ,
,![]() ,
,![]() ,通过对FY05无人机飞行过程中,角度的变化判断其飞行方向与FY00相比较调整飞行方向,使FY05无人机到达目标点。由此,FY02和FY05即为(1)中两架编号已知的无人机,在通过三角测量定位的方式,调整其他无人机的飞行方向,从而使九架无人机均匀的分布在半径为98m的圆周上。
,通过对FY05无人机飞行过程中,角度的变化判断其飞行方向与FY00相比较调整飞行方向,使FY05无人机到达目标点。由此,FY02和FY05即为(1)中两架编号已知的无人机,在通过三角测量定位的方式,调整其他无人机的飞行方向,从而使九架无人机均匀的分布在半径为98m的圆周上。
2.2求解模型
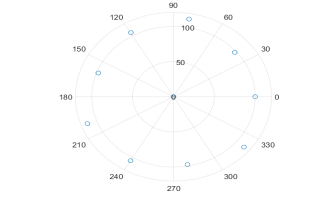
图 2 无人机极坐标的大致分布图
由于只有FY01处在100m半径的圆周上,我们首先调整3架无人机在同一个半径的圆周上,而这个半径不一定是100m。(题目中说使得9架无人机最终均匀分布在某个圆周上,所以圆心FY00不一定在最初的(0,0)上,半径也不一定是100m)
以下步骤中,调整无人机位置时,每次朝着指定方向只移动一小段距离∆d,某些步骤需要重复多次。
第一阶段,FY00、FY09、FY01、FY02之间互相发信号,并调整位置,使得FY09、FY01、FY02构成一个底角20°的等腰三角形,且FY00位于此等腰三角形的外心。
第二阶段,![]() 、
、![]() 、
、![]() 发信号,
发信号,![]() 接收信号并调整位置。根据第一小问中的模型,建立方程组,求出与
接收信号并调整位置。根据第一小问中的模型,建立方程组,求出与![]() 相关的
相关的![]() 和
和![]() 。注意,此时我们已经不知道真实的半径
。注意,此时我们已经不知道真实的半径![]() 是多少,但是不影响,我们只要确保
是多少,但是不影响,我们只要确保![]() 趋于
趋于![]() 就行。
就行。
![]()
上面的方程组中,![]() 和
和![]() 均为接收的信号,为已知。整理上面的方程组,我们可以得到:
均为接收的信号,为已知。整理上面的方程组,我们可以得到:
![]()
再用代入法可得:
![]()
重复整个第二阶段(包括求解方程组),直至![]() 且
且![]() 同时成立,其中
同时成立,其中![]() 为一个设定的极小值。重复操作至
为一个设定的极小值。重复操作至![]() 被调整到正确的位置。
被调整到正确的位置。
第三阶段,![]() 、
、![]() 、
、![]() 发信号,
发信号,![]() 接收信号并调整位置。
接收信号并调整位置。
…
第七阶段,![]() 、
、![]() 、
、![]() 发信号,
发信号,![]() 接收信号并调整位置。
接收信号并调整位置。
第三至第七阶段与第二阶段类似,就不赘述了。
完成上述阶段,所有的无人机位置就调整完毕。
即可得到以下图示结果
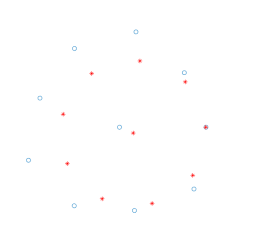
图 3 仿真模拟图
参考文献
[1]徐诚黄大庆孔繁锵.仪器仪表学报[J],第36卷第5期.2015-05.
[2]文富忠赵和鹏胥全春坤娅.电子信息对抗技术[A],1674-2230(2019)03-0001-06.2019-05-15

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号