(广西电网有限责任公司来宾供电局546100)
摘要:基于我国目前对电力系统稳定性需求不断增大的现状,文中研究了输电线路长距离无人机巡视系统,本系统采用多传感器融合的分段式定位方式以实现无人机的低成本精确停靠方案,设计用于多旋翼无人机停靠和充电的光伏储能停机坪或者停机舱,结合无人机智能管理调度系统,可在不需人为干预的情况下实现飞行、巡航、停靠、充电全过程。最终构建全自动的输电线路长距离无人机巡视系统,为智能电网的发展保驾护航。
关键词:电力巡检无人机;远程监控;无线充电;超声波定位
0 引言
随着智能电网概念的提出,我国相继出台相关政策支持系统开发电力系统的智能化设备,以确保电网的智能化、信息化、经济环保化的运行。2021年,国家能源局将大力推动无人机巡检的发展,无人机巡检代替人工巡检已经成为必然。
然而,目前无人机电力巡检仍存在诸多问题:依赖人工操控作业,超视距山区作业难度大,效率低,无法有效采集巡视数据;巡检过程中,数据采集的速度和质量受制于人,实现客观全面的数据采集迫在眉睫;尤其是无人机作业范围和时间受到机载电池容量的限制,导致无人机无法长距离与长时间作业。其中,文献[1]提到的无人机的精确停靠技术、文献[2]提到的航线与停机仓定点规划、不分正负极的充电技术是解决能量补给关键技术问题,目前市场尚未有低成本的无人机精确停靠与停机仓方案。
开展对输电线多旋翼无人机自主飞行、精准停靠、自主充电的智能化系统的研究,以解决无上述矛盾和问题。开展无人机远程监控技术、无人机航线规划技术、无人机精确停靠技术、无人机自主充电技术的关键技术研究。通过无人机的自主充电技术弥补无人机由于电池容量问题而造成的无法长时间自主工作的问题,使得无人机在无人干预的情况下能够长期乃至无限自主巡航执行任务。其次本系统通过多传感器的使用,解决了多旋翼无人机的精准停靠问题,使得无人机能够自主回到指定坪和停机舱并进行充电工作。
2 硬件系统
2.1无人机组件
无人机上包含GPS定位模块和无线通讯模块。其可通过物联网通讯协议主动向平台服务器发送自身状态参数。同时,无人机在需要返航、停靠、充电时首先向平台服务器发送相关请求,并根据服务器返回的信息决定下一步飞往并停靠至哪一个停机坪。在该系统的关注点中,无人机端的主要技术要点是物联网通讯软件。拟采用物联网操作系统FreeRTOS并建立自有的物联网数据平台,以提高物联网通讯的稳定性,并提高开发和测试效率。FreeRTOS内置 IoT Core模块,用于实现局域网和广域网的物联网连接,使得无人机可以在Internet和局域网中运行,从而可以兼容不同的网络设计方案。
项目总体目标、主要内容和考核指标
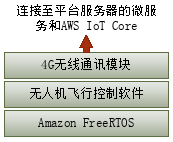
图1 无人机的软硬件功能结构
2.2 停机坪与停机仓组件
停机坪、停机仓带有GPS定位模块、无线通讯模块、充电装置、无人机降落引导装置等。其中GPS定位模块和无线通讯模块等用于向平台服务器上报自身状态信息,包括是否已有无人机停靠、可用电量、地理位置、气象情况等。在该系统关注点中,停机坪、停机仓的主要技术点与无人机相同,亦是物联网通讯软件。为了提高不同物联网终端的软件兼容性,停机坪、停机仓也采用FreeRTOS、IoT Core等组件作为物联网基础通讯组件。同样采用4G网络通讯模块作为物联网通讯的硬件支持。此外,停机坪还应配有引导无人机降落的遥感信号,如立体超声波、全向电磁波收发传感器等,用于实时告知无人机两者的相对方位,辅助无人机降落。


图2 取电端子
如图2所示,采用电极板接触方式进行充电,接触式充电具有充电功率大、电能转换效率高、制造成本低等优点。同时通过设置电极转换电路可有效避免正负极反接的情况出现,无人机可以以各种方位停靠、即降低了无人机的自动停靠难度,也保证了充电的安全性。

图3 电极转换电路
2.2.2停机仓充电与信息传输模块
停机仓是为了无人机中途进行中继补能、遮风挡雨、图传数传通讯而设计的,主要安装在杆塔之上。因为技术的迭代性,本技术方案主要以初代停机仓作为讲解。无人机停机仓技术方案包含了停机坪和停机仓,当仅作为无人机临时停靠点时,部署停机坪。当作为无人机长期停靠点时,部署停机仓。停机仓作为停机坪功能的延伸,包含了停机坪的所有功能,故文中仅对停机仓进行详尽描述。停机仓的控制系统框图如图4所示,停机仓的示意图如图5所示。
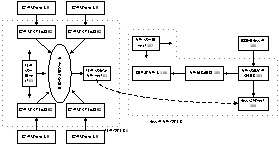
图4 初代停机仓控制系统框图

图5 初代停机仓样机示意图
3 软件系统
无人机智能管理调度系统主要包括物联网通信终端、客户端软件、综合管理调度服务端等构成。各组件的职责如下:
(1)物联网通信终端:物联网通信终端包括无人机和停机坪的通信组件,其使得无人机和停机坪能够随时与综合管理调度服务端进行交互,令系统中的所有终端设备都可通过服务端联网成为一个有机的、可调度的集群。
(2)客户端软件:客户端软件为终端用户提供查看无人机和停机坪状态、查看远程数据(如无人机回传的视频、监测数据、停机坪环境状态数据等)、下达调度指令等功能。
综合管理调度服务端:综合管理调度服务端负责响应来自客户端软件、物联网通信终端的所有交互请求,并存储这些请求所产生的所有数据。此外,综合管理调度服务端具备强大的计算力,其综合调度和决策引擎的性能可弹性扩展,适应系统在不同阶段所具备的不同等级负载的需求。
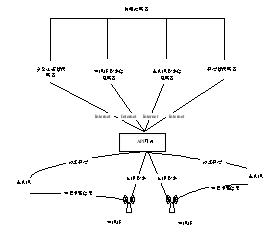
图6 整个系统的参与者及其交互系统框架图

图7 无网络信号情况下的中继通信架构
机场和无人机首先通过串口和Modbus通信协议将状态数据就近传输至物联网通信网关处,该网关实现了Modbus协议到RESTAPI的协议转换功能,从而令机场和无人机具备物联网通讯能力。最终,无人机和机场的状态数据将通过RESTAPI上传至服务端的实时信息数据库中,供机场管理和补能调度功能使用。
4 测试数据
通过机场管理组件,用户可方便地查看一个区域内的所有机场的实时状况,包括机场型号、储备电量、GPS位置、海拔高度等静态信息以及温湿度等实时信息。所有信息实时更新,一旦服务端收到新的数据,将立即反馈到客户端软件。
图8是机场管理组件的主界面图,地图默认以路网图形式显示。

图8 机场管理软件主界面(路网图)
图9是软件显示单个机场数据的情况。

图9 显示单个机场数据
此外,软件还支持以树状列表形式显示各机场的各项参数。以树状列表形式显示附近所有机场的详细参数,如图10所示。其中,红色突出显示部分是机场ID。

图10 各机场参数的树状数据列表
5 结论
本文开展对输电线多旋翼无人机自主飞行、精准停靠、自主充电的智能化系统的研究,以解决无人机在长线路电力巡检过程中存在的矛盾和问题。通过无人机的自主充电技术弥补无人机由于电池容量问题而造成的无法长时间自主工作的问题,使得无人机在无人干预的情况下能够长期乃至无限自主巡航执行任务。其次本系统通过多传感器的使用,解决了多旋翼无人机的精准停靠问题,使得无人机能够自主回到指定停机坪和停机舱并进行充电。
参考文献
[1]王永强,车凯,戴铎,王红星,高超,黄郑.电力巡检无人机精准降落方法研究与应用[J].计算技术与自动化,2021,40(02):41-46.
[2]郭庆华, 北斗+轻小型激光雷达无人机自主飞行关键技术研究与电力巡检应用. 北京市,北京四维空间数码科技有限公司,2020-07-30.
作者简介:刘福,性别男,民族:壮族,学历:本科,职称:工程师,研究方向:输电运维及检修。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



