浙江吉利新能源商用车研究院有限公司 310018
北大荒泰华有机食品股份有限公司 150300
摘要:自动驾驶技术在我国的关注度较高,对这项技术进行深入的研究,有利于提升我国的自动驾驶技术的水平,促进我国汽车产业的升级,帮助实体经济快速发展。本文对自动驾驶技术中的激光雷达点云实时目标聚类与识别方法进行了深入的研究,希望对我国相关技术的进步以及汽车行业的发展有积极的影响。
关键词:自动驾驶技术;激光雷达;目标聚类
引言:自动驾驶技术是一种拥有多个学科交叉知识的应用技术,涉及到车辆工程、计算机科学、智能系统、控制理论等当前非常先进的科学。在搭建自动驾驶平台的时候,需要对其进行科学的设计,使车辆能够对周边的交通环境做出及时的响应,实现对车辆的智能、自动操控,为驾驶人员的操作提供更加便利的条件。
1自动驾驶平台的主要框架
自动驾驶平台由硬件设施和软件系统两部分组成,在传感器设备以及计算机硬件平台的基础上搭建的激光雷达点云处理模块,这个模块主要由数据预处理、地面处理、目标聚类以及目标识别子模块构成,整个模块在四个子模块的流水处理中互相衔接,能够保证运行的精准性。如图1所示,是点云处理框架。
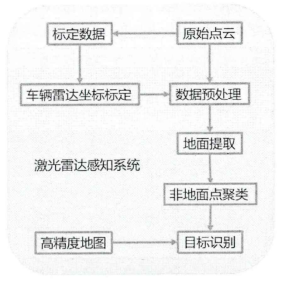
图1 点云处理框架
2点云预处理和地面分割
2.1激光雷达
在自动驾驶技术中,激光雷达是主要的传感器,其安装的位置以及型号对点云获取的结果有较大的影响。激光雷达是主动探测的一种传感设备,先向环境中发射激光,然后再接收返回的激光,就可以对环境的信息进行测量。通过激光雷达技术获取的环境信息是通过点云的方式呈现出来的,因为环境信息是不断变化的,因此,点云数据也是随时变动的。点云数据可以利用x、y、z坐标进行表示,其三维表示公式为:
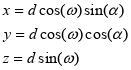
在坐标轴上,![]() 表示的是激光通道的垂直角度、而
表示的是激光通道的垂直角度、而![]() 表示的是激光通道的水平角度。
表示的是激光通道的水平角度。
2.2点云预处理
激光雷达一般安装在车辆的上方,便于点云处理,激光雷达在采集数据信息时,需要对原始的数据进行标定,采取最小二乘法拟合对其进行标定,然后利用坐标系对其进行计算,如果地面是一个水平的平面,就可以利用假设的方法将雷达座标系中的单位法向量计算出来,然后进行点云坐标的转换。将点云坐标转换成车辆坐标后,需要将原来的点云坐标储存起来。在点云数据信息的预处理中,需要将单个的点云数据计算出水平角度以及垂直角度,再将其定位储存于深度图的结构中,创建一个二维数组储存点云数据,然后将点云数据按照一定的要求固定范围,再对其进行初始化,读取点云数据,计算出Hor值,经过处理得到包括所有点云数据信息的二维数组。如图2所示,是点云采集与储存示意图。
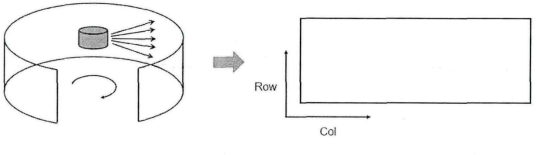
图2 点云采集与储存示意图
2.3点云地面提取
激光雷达传感器在对点云数据进行处理时,需要先将点云数据分类,将其转换成对象级数据,然后从中提取出地面对象,一般对点云进行处理时可以利用地面模型拟合等方式,方便激光雷达传感器进行处理。如图3,是点云地面提取效果图。
![]()
图3 点云地面提取效果图
3点云目标聚类
3.1聚类方法和分割标准
点云数据的地面提取完成以后,就可以进行非地面点云数据的分类,可以利用点云深度图中的二维数据对点云的邻域关系进行获取。但是由于点云的分布是较为零散的,可以应用聚类的方法对点云进行划分。主要的聚类方法有基于网格的聚类、基于层次的聚类等。前者需要提前将点云数据划分到不同的网格中,然后再将网格中的数据简化,可以实现对数据的快速处理;后者主要通过层级结构对数据进行划分,层级结构越多,那么需要计算的次数就越多,这种方法可以实现点云单点的区分,聚类的标准也可以自行设置。在对点云数据进行分割时,需要设置分割标准。首先,在水平方向上,因为相同通道下点云的垂直角度是相同的,而水平角度相差较小,而且呈现出密集的状态,因此在分割时需要分割标准一定要精密。其次,在垂直方向上,由于垂直的方向上有128条通道,那么不同通道中的点云需要使用欧式距离计算其是否属于同一类别[1]。
3.2点云结构和遍历方法
在点云结构的预处理阶段,已经将相关数据存在深度图中,在这里点云可以看成是图节点,每一个图节点所储存的数据信息包含了点云的全部信息。在使用点云的集合图节点时,可以将一个类型的点云进行简明表现,将通道的序号、起点以及终点的位置储存起来。但是不同的通道不需要将每个点云都遍历,访问点云集合图节点的信息,从而获取点云的位置信息,读取水平角度下相近的点云,如果是同一个类别就要合并,对类别需要进行更改。通过图节点对点云的结构进行表述是对点云集合的首次分割,进而需要对相同通道中的点云进行再次分割,然后标记不同的类别,然后可以得到不同的集合,在对不同通道中的点云进行合并时,要更新不同集合的标签,最后就可以得到聚类的结果。在分割的时候需要利用激光雷达对不同通道中的点云数据进行第一次的分割,这个过程也是点云的第一次遍历。如图4所示,是点云分割后示意图。
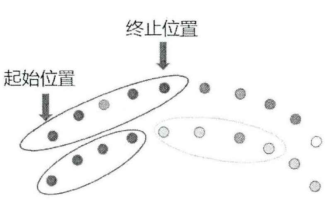
图4 点云分割后示意图
4点云目标识别
4.1目标识别方案
点云的聚类完成以后,需要对得到的目标进行正确的分类,分类的方法可以使用特征提取的方法或者是卷积神经网络的方法,二者的区别在于对特征的提取上是应用人工设计的方式还是深度学习的方式。目标识别的主要过程为应用过程以及训练过程。应用过程是应用高精度的地图对道路中的点云对象进行筛选,确定对象,然后进行特征的提取。训练过程则是在点云聚类的结果中选取识别的对象,然后再进行特征的提取。
4.2高精度的地图筛选
点云聚类之后,会得到很多个点云对象,但是并非所有的点云对象都是重要的,因此需要对这些对象进行筛选,确定道路中重要的对象,然后进行识别。在具体的操作中,可以利用GPS定位系统确定车辆的位置以及道路的位置,然后再利用高精度地图将点云之外的对象剔除掉,然后选择合适的对象进行识别,在这里需要应用到XY平面栅格图,使点云更加丰富,然后再利用地图的信息筛选车辆以及行人等对象。应用这种方式,可以提升自动驾驶的实时性。如图5所示,是应用高精度地图以后的点云示意图。

图5 高精度地图的使用示意图
4.3点云关键信息的提取
对点云的目标进行分类,需要选择合适的分类器,然后再对点云的特征进行选择,生成高维的特征向量,然后训练分类器,最终实现对目标的识别[2]。在具体的操作中,可以应用对象的空间尺寸特征、垂直跨度分布的特征、反射率特征以及总体特征对点云进行关键信息的提取。例如,在应用点云垂直跨度分布的特征对关键信息进行提取时,不同的垂直角度通道中的点云数据信息分布情况是大不相同的,车辆的点云数据在较高的通道中较少,在较低的通道中较多,而且呈现出从上到下递增的现象。行人在不同的通道中分布相差不大,但是中间略大,两头较小,跨度较车辆小。在操作时,假设某个点云对象P=![]() 点云的垂直通道的垂直角度范围可以利用公式进行计算:
点云的垂直通道的垂直角度范围可以利用公式进行计算:
![]()
提取出水平旋转角度两个最大点的差值,最终得出特征向量。
差值的计算方法如下:
![]()
如图6所示,是点云的基本分布特征示意图。
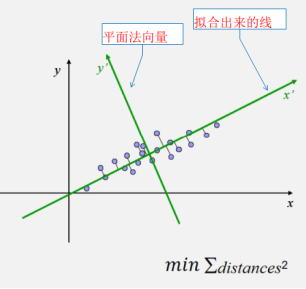
图6 点云的基本分布特征示意图
结论:总之,自动驾驶技术在我国仍处于起步阶段,我国要想实现自动驾驶车辆的量产,需要继续投入资金和技术,不断探索激光雷达技术中的点云实时目标聚类与识别办法,为我国自动驾驶车辆的发展创造良好的条件,同时国家应积对相关企业进行鼓励,给予企业政策上的优惠,推动我国自动驾驶车辆的快速发展。
参考文献:
[1]马学年. 基于数据驱动的自动驾驶激光雷达点云仿真技术研究[D].哈尔滨工业大学,2021.
[2]杨浩哲. 面向自动驾驶的激光雷达点云实时目标聚类与识别方法研究[D].中国科学技术大学,2021.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



