340204198103170717
摘要:文中较为体系地讲解了运用UG软件对抓娃娃开展设计及模型过程,详细介绍了UG软件的基本上建模、装配图的转换和安装体的装配技术过程等。同时对CAD/CAM技术的发展状况及其将来的发展完成了分析,明确运用UG作为设计产品的软件基本。对于第一篇论文中提到的抓娃娃结构类型对抓娃娃的横着传动装置,纵向传动装置,抓具传动系统等三大关键构造完成了设计和模型,应用了一定的方式方法摆脱了抓娃娃模型流程中的众多问题,产生了相对完善的抓娃娃三维模型和成套设备的施工图纸。
关键词:抓娃娃机,三维建模,UG
第一章 引言
迄今为止中国早已成为了全球最大的玩具生产出口公司,全世界绝大部分玩具都是在中国生产的。(1)在这种令人震惊的玩具,纯机械设备玩具赶集的傀偶,早已吸引住了大批量的大人和孩子的关注。这种产品玩具投射有玩具,模型,拼装和仿真模拟,传动齿轮组织等滚轮体制的开发和设计有着关键价值,许多玩具的设计理念是特别顺利的。
研究院自动化技术研究室中国张志刚,开发了从仿生学的视角智能机器人鱼设计和仿真软件。
在亚洲娃娃机更为风靡,在日本,台湾,香港,韩国等地街边时兴。近些年,它已慢慢返回了中国。广州,深圳,普遍遍布在中国各大城市,如上海,已被加入到中小型和中型城市。
抓娃娃关键根据着力点开展实际操作,用以把握住相对应大小的礼品,而且游戏的玩法简易且不断发展。剪子相对繁杂,游戏玩家操纵操作手柄使剪子与悬架的绳索两端对齐,剪子用自身的技术激光切割。绳索,做礼物。难度系数略高,但更难,更粘,礼品的选取是完全免费和无尽的。普遍的礼品选择是大中型绮丽孩子,礼品包装盒玩具,饰品店,平时生活用品。因为礼品丰富,他们可以播放宽阔的空间,游戏玩家喜爱,并塑造很多技术专业师傅的各种在线平台。因而,市场对抓娃娃的要求也在提升。玩偶公仔设备也有引出了各种有趣的机械结构设计。
第二章 UG软件介绍
2.1软件概述
UG是一款十分完善的三维建模软件。合适的行业十分普遍。
2.2 UG的基本功能
2.2.13D建模设计
UG的3D模型作用是十分强有力的,相比第三方软件也有着更为简单的电脑操作系统,便捷作业者制作。
图4UG热烈欢迎页面
2.2.2大型装配体设计
在UG软件中三维模型可以在一起安装。而且可以配备不同版本号的零件,以便捷解决各种不同的状况。还能够应用发生爆炸主视图作用让cad零件图的各种零件呈现在咱们眼前。
2.2.3钣金设计、焊接、铸造和塑料零件设计
UG中也有电焊焊接设计作用,焊接件是由一个多考题零件模型进行的,UG系统软件会对模型环境自主设定。根据UG软件对设备实现设计,可以快速开发特性及规定合格的塑胶和铸造件设计。
2.3UG建模的优点
UG是相对更为便捷简洁的一款三维建模软件,一些主要的系统命令,制作简易的三维图是特别快就可以把握的,UG作用也很齐备,可以让消费者无需奔忙于好多个软件之间,节省了时间跟成本。
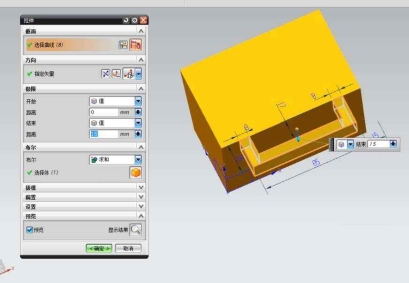
图5UG模型案例
第三章 抓娃娃机主要零件的设计与建模
3.1壳体的建模过程及操作步骤
选择一个基准点来开展草图制作,画出一个正方形,绘制规格为600x600;(3)

图6二维草图
在上边菜单栏中选定拉申指令,拉申间距设定2000;(4)

图7拉伸实体线
随后在菜单栏中选择拔模指令,拉申方位为默认设置拉申方位;

图8实体线编写
在菜单栏中选择圆角指令,把娃娃机机壳的顶端四周,进行圆角指令的实际操作;(5)

图9倒圆角解决
选择抽壳指令,抽壳方位为默认设置拉申方位,薄厚为3;

图10抽壳解决
选择基准点1为草图制作的基准点,制作出礼物展现框;

图11拉申摘除草图
选择此实体线横截面作为草图制作的基准点,制作如下所示规格的草图,随后撤出草图;

图12拉申摘除
选择凸模/拉申指令,拉申方位为默认设置拉申方位,拉申长短选择产生到一面,点一下确认按键,进行拉申指令的实际操作;
选择此实体线的横截面作为草图制作的基准点,制作如下所示规格的草图,随后撤出草图制作;

图13拉申摘除草图
选择凸模/拉申指令,拉申方位为默认设置拉申方位,点一下确认按键,进行拉申指令的实际操作;

图14拉申摘除
制作进行如下所示。

图15机壳实体线
3.2横向传动系统的建模过程及操作步骤
3.2.1导杆的设计
选择前视基准点作为草图制作的基准点,制作直径10mm的圆草图;随后撤出草图制作;

图16二维草图
选择凸模/拉申指令,拉申方位为默认设置拉申的方位,点一下确认按键,进行凸模/拉申指令的实际操作;

图17拉伸实体线
垂直方位力的公式与结果:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
垂直方位的弯矩公式计算与结果:
![]() (6)
(6)
![]() (7)
(7)
依据上述测算横着力的弯矩,垂直方位的弯矩,可以测算总弯矩:
![]() (8)
(8)
![]() (9)
(9)
其中,![]() 的数值较大。
的数值较大。
在正常情况下的校正中,只查验轴上较大弯矩和扭矩的截面,轴的内应力测算为:
![]() (10)
(10)
式中![]() 。
。
轴的原料选择的是45钢,该材料的内应力极限为![]() 。
。
由此可见![]()
因此结果达到强度规定。
3.2.2滚轮的设计
制作出下列草图,随后撤出草图制作;

图18二维草图
点一下菜单栏中的转动指令,转动草图,进行基本模型;

图19转动实体线
在实体线的核心进行草图,在发布草图制作;

图20编写草图
选择凸模/拉申指令,拉申的方位为默认设置的拉申方位,拉申方法选择产生到一面,点一下确认按键,进行凸模/拉申指令的实际操作;

图21拉申摘除
点一下确认按键,进行放缩占比指令的实际操作;

图22滚轮实体线
3.2.3明确电机额定功率与转矩
a.估计电机额定功率
电机驱动器输出功率的计算方法为:
![]() (11)
(11)
b.估计电机转矩
计算方法为:
![]() (12)
(12)
![]() ,
,![]() ,将有关主要参数带到上式得。
,将有关主要参数带到上式得。
3.2.4驱动电机的型号选择
依据上一节的测算,大家获知,电动机估计主要参数为:
电机额定功率
![]()
电机转矩
![]()
减速器传动比
![]()
因而换算电动机的最大转速比
![]() (13)
(13)

3.2.5横着传动装置的安装方式
横着传动装置的安装是将滚轮组装在两边的摆杆上,滚轮一侧为固定不动板,另一侧是电机传动箱。
这类传动装置的优点是可以开展水准横着与横向的交叉式挪动,而且挪动过程中,组织可靠性好。

图23传动系统框图
第五章总结
全部的发现和创建的是以刺激性的才智是离不开的。每一个人是进步的聪慧。因为这类革新的论文的结果,我的智力早已刺激性。触碰现实生活中,觉得我觉得,其实我告诉他,看一下全部。此次论文,根据分析娃娃机的原理,已被设计为娃娃机。依据原理分析,它设计的抓娃娃的具体构造,文中第一详细介绍了娃娃机的研究思路和实际意义。娃娃机的国内国外研究现状,随后明确提出娃娃机的设计思路和基本上设计构思。根据此次论文,我将演示运用功能和UG和CAD软件的设计图的工作能力,总结自身的学习成果高校很多年,统一,造成了迅速,对作业的执行和将来打下了基本。
参考文献:
[1]张秀蓉,王忱鹤. 绿色理念在机械设计制造中的渗透分析[J]. 时代汽车,2022,(06):19-20.
[2]陈毫. 多元化分析视角下机械设计制造及自动化应用[J]. 内燃机与配件,2022,(06):170-172.
[3]欧振议. 机械设计制造的数字化与智能化发展研究[J]. 中国设备工程,2022,(04):26-27.
![]()

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



