孟博 陈霞
身份证号:642223199602060631身份证号:642223199611010628
摘要:近年来太空探索活动不断增加,实现远距离的可靠通信成为阻碍航天发展的一个难题,更大口径更高精度的空间可展天线成为如今各国的研究重点。在众多形式的可展开天线中,构架式空间可展开天线结构单元形式多样,可满足各种复杂几何设计、刚度、精度、重复性、收纳率的要求,广泛应用于航天领域。本文主要研究的是构架式空间可展开天线,运用ANSYS对构架式空间可展开天线进行有限元建模并进行动力学分析,以达到提高网面精度的目的。本文介绍了索网结构的几何设计方法与索网预拉力的计算,桁架结构的几何设计方法,并利用MATLAB编写了参数化程序实现了索网结构和桁架结构的自动计算。通过ANSYS命令流建立了构架式空间可展开天线的有限元模型,然后对其进行了一系列动力学测试,并分析其动力学特性。
关键词: 空间结构 可展开天线 结构设计 动力学分析
![]() 第一章 绪论
第一章 绪论
第一章 绪 论
1.1空间可展开天线的研究现状
1.1.2可展开天线的研究现状
1970年“东方红”一号发射成功,标志着我国航天事业进入了一个快速发展的时期。根据我国航天事业的发展计划,北斗定位系统、空间站以及探月登月工程的需要,毫无疑问,这将极大地促进和帮助大型空间可展开天线的发展。国内的一些研究院所和学校也进行了关于索网天线的研究,而且得到一定的成果,这里面,浙江大学空间结构研究中心制作了防缠绕索网天线的原理模型机;哈尔滨工业大学刘荣强等人研制的构架式抛物面可展天线;国内的中国电子科技集团公司第十四研究所、中国航天科技集团公司中国空间技术研究院西安分院(504所)和中国电子科技集团公司第三十九研究所目前也正在进行着各种不同形式和口径可展开天线的研制工作[[1]][[2]],随着我国航天事业的迅速发展,我国的研究水平正在逐步提升[[3]]。

图1.3 构架式可展开天线
如图1.3所示为日本宇航局2006年发射的![]() 工程试验卫星天线,包含两个有效口径为
工程试验卫星天线,包含两个有效口径为![]() 的可展开天线,由于两个天线分别负责发射信号与接收信号,可以有效的避免干扰。这种天线是由14个基础结构模块组建而成。每个基础模块由索网与展开桁架组成。
的可展开天线,由于两个天线分别负责发射信号与接收信号,可以有效的避免干扰。这种天线是由14个基础结构模块组建而成。每个基础模块由索网与展开桁架组成。
![]() 第二章 可展开天线的几何设计与预拉力计算
第二章 可展开天线的几何设计与预拉力计算
第二章 可展开天线的几何设计与预拉力计算
2.4桁架的几何设计
2.4.1桁架模块及关键点
构架式可展开天线由若干个可展开结构模块组成,见图2.20,每个可展开结构模块包括金属反射网和背架2个主要部分。模块展开后是六棱柱形状。每个结构模块可以分为上、下两个表面,上、下表面各有7个节点,分别为1个中心点和6个轮廓节点,如图2.20所示。

图2.20 构架式可展开天线模块
2.5参数化建模
2.5.1参数化界面
在本例中,我们可以建立一个参数输入窗口,在窗口中可以直接修改参数,同时进行计算绘图,建立模型。整体工作流程如图2.26所示。

图2.26 参数化设计流程
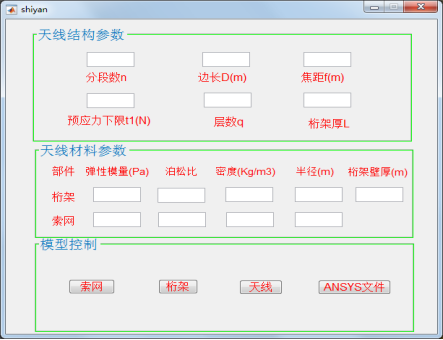
图2.27参数化设计界面
图2.27是最终的参数化界面,实现了模型结构参数和材料参数的输入,图像与Ansys文件的输出。整个界面分为三个部分,第一部分为可展开天线建模所需的结构参数的输入,包含焦距、分段数、预应力等;第二部分为计算所需的天线索网及桁架的材料参数;第三部分为图像以及操作控制部分,能够实现绘图,清除图像等功能。
首先在界面内输入设计要求的可展开天线的结构参数如焦距、预应力、分段数等,接下来需要输入天线索网和支撑桁架的材料参数,这些参数将会用于有限元模型建立时材料的定义,所有参数输入完成后点击绘图按钮,程序会自动执行计算所有节点坐标并给予编号等步骤,最终弹出绘图窗口,展示计算得到的天线的模型如图2.29,同时我们可以选择是否显示节点和索段的编号等,最重要的一步是计算完成后输出.txt文件,这个文件包含着天线的结构参数,材料参数,预应力等,是Ansys软件专用的命令流文件。
2.5.3算例分析
通过MATLAB编写了相应的程序,实现了对索网的预拉力的计算。现在以分段数为2即n=2的可展开索网天线为例计算说明,输入参数如图2.28所示;

图2.28 天线参数输入

图2.29 天线模型窗口
![]() 第三章 可展开天线有限元模型的建立
第三章 可展开天线有限元模型的建立
第三章 可展开天线有限元模型的建立
3.2模型的建立
3.2.3模型的建立
按照下面两个表中所给的参数建立有限元模型。
表3.1 天线结构参数
边长/m | 1 | 焦距/m | 4 |
分段数 | 2 | 层数 | 2 |
桁架厚/m | 0.8 | 预应力下限/N | 10 |
索段半径/mm | 1 | 桁架内外径/mm | 15/16 |
表3.2 天线的材料参数
参数 部位 | 材料 | 弹性模量 [GPa] | 泊松比 | 密度 [Kg/M3] |
索网 | KEVLAR49 | 137 | 0.3 | 1440 |
桁架 | 碳纤维 | 320 | 0.3 | 1800 |
运行MATLAB编写的程序,输出包含模型全部信息的.txt文件。将该文件复制输入ANSYS APDL,进行简单的设置我们可以得到最终模型,如图3.1所示。
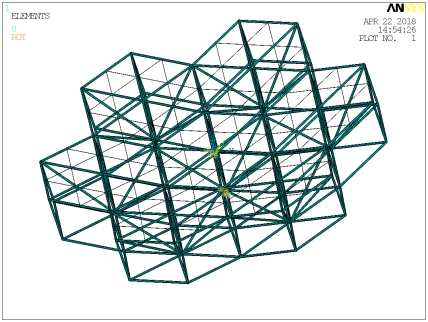
图3.1a 天线结构
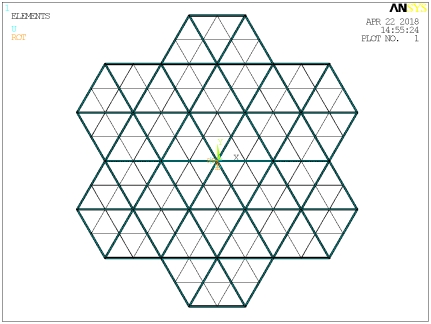
图3.1b 天线结构俯视图
![]() 第四章 可展开天线动力学分析
第四章 可展开天线动力学分析
第四章 可展开天线动力学分析
4.2模态分析
这里对天线连接处的连点进行约束,计算其前十阶模态。
表4.1 前十阶模态的固有频率
阶次 | 频率/Hz | 振型描述 | 阶次 | 频率/Hz | 振型描述 |
1 | 93.924 | X向弯曲 | 6 | 287.33 | 扭转 |
2 | 93.934 | Y向弯曲 | 7 | 295.40 | 整体模态 |
3 | 137.14 | 局部模态 | 8 | 295.40 | 整体模态 |
4 | 203.50 | 扭转 | 9 | 392.84 | 整体模态 |
5 | 203.50 | 扭转 | 10 | 414.89 | 整体模态 |
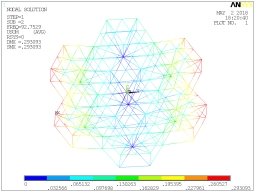
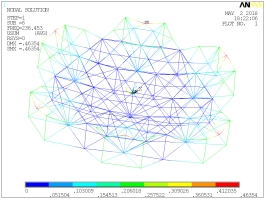
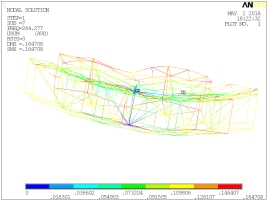
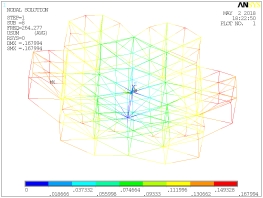
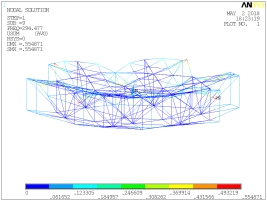
一阶模态 二阶模态
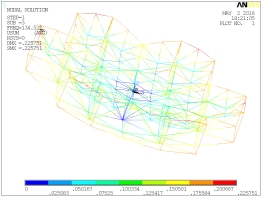
三阶振型 四阶振型
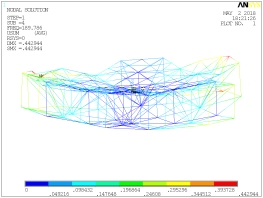
五阶振型 六阶振型
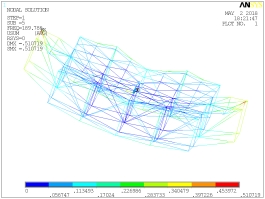
七阶振型 八阶振型
九阶振型 十阶振型
图4.1 可展开天线的模态图
表4.1为索网天线的前十阶固有频率,从结果来看,前十阶模态变形对于天线结构产生了很大的变形,可能会引起天线结构的损坏,所以在空间使用时要避免自由振动的频率与分析结果中的固有频率相同,这样才不至于产生天线的共振,为天线结构和天线高效率的工作做好保障,避免天线共振而发生事故。
4.3冲击响应分析
本文中采用如图4.2所示的阶跃载荷作为输入激励,施加一个大小为100N,持续时间为0.01s的外力,作用点的位置如图4.3所示,方向为Z轴负方向。由于卫星质量较大我们把卫星看作是静止的,把天线的约束点作为固定点,约束固定点的六个自由度。

图4.2 冲击加载历程图
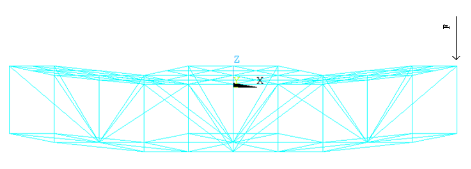
图4.3 载荷作用位置
通过ANSYS进行运算求解,最后输出部分天线节点的位移随时间的变化曲线和天线与卫星的连接点处的约束力,分别如图4.4所示。从图中可以看出,天线受到冲击后位移也达到最大值,曲线发生振荡并且不断衰减,经过一段时间后趋向稳定,也就是天线恢复稳定状态,最终所有节点的位移均会恢复到初始状态,这个过程所花费的时间与天线的结构阻尼有关。

图4.4 天线节点位移响应曲线(部分节点)
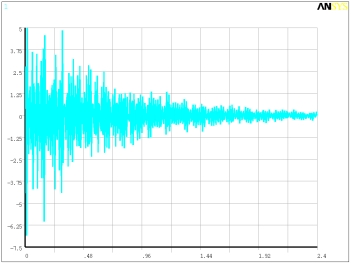
图4.5 天线加速度力响应曲线(34号节点)
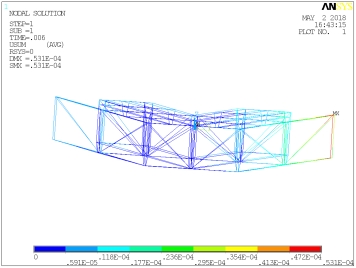
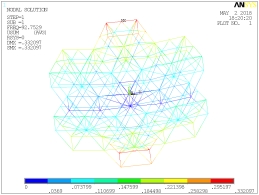
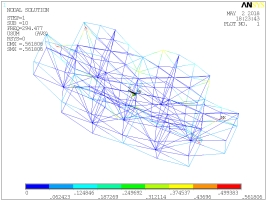
图4.6天线位移响应最大时位移云图
4.5随机振动分析
根据相关国军标,我们所采用的PSD见表4.2和图4.14。
表4.2 鉴定级随机振动响应试验条件
频率范围Hz | 2~95 | 95~130 | 130~200 | 200~600 | 600~2000 |
功率谱密度 | +6dB/oct | 1g2/Hz | -13dB/oct | 0.16g2/Hz | -15dB/oct |
作用点 | 天线与卫星连接的两个节点 | ||||
方向 | 分别沿X,Y,Z三个方向施加 | ||||

图4.14 随机振动激励功率谱密度
对曲线的积分也就是曲线与X轴围成的面积的平方根就是输入的加速度均方根值,所以可以求出输入功率的加速度均方根(grms)为17.3g。
通过ANSYS求解,进行计算可以得到各个方向的位移响应曲线,如下图所示,下图中选取的节点统一为34号节点。
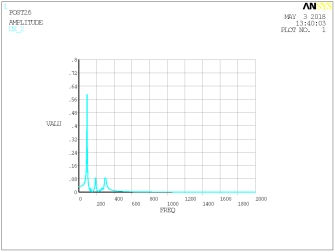
图4.15 X方向随机振动响应曲线
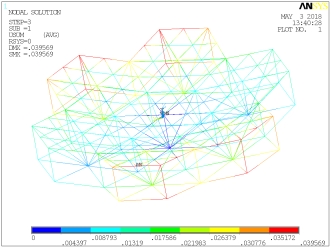
图4.16 X方向随机振动位移云图
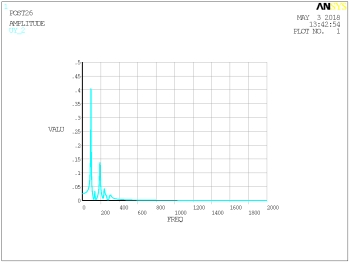
图4.17 Y方向随机振动响应曲线
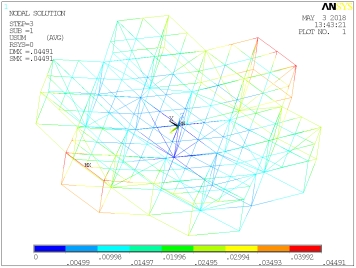
图4.18 Y方向随机振动位移云图
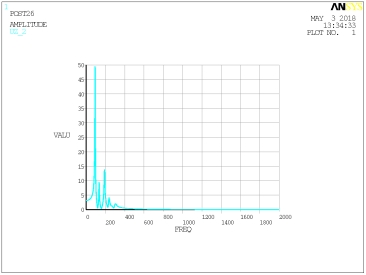
图4.19 Z方向随机振动响应曲线
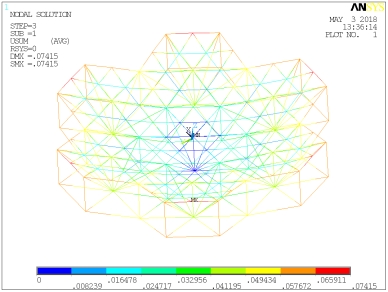
图4.20 Z方向随机振动位移云图
观察上面ANSYS分析结果的图形,我们可以得到结论:随着激励的施加,天线模型的响应也随着一起变化,天线受到激励后位移也达到最大值,曲线发生振荡并且不断衰减,经过一段时间后趋向稳定,也就是天线回复稳定状态,最终所有节点的位移均会恢复到初始状态。在模型位移最大时,所有节点的位移响应基本较小,而且各个点的位移响应曲线的趋势很接近,曲线形状基本相同。并且模型变形位移达到峰值时的频率,主要在其固有频率附近,说明此时有结构共振发生,这与第二节模态分析的结果相符,说明结构满足条件。在三个方向的功率谱激励中,Z方向的激励下位移值最大,且距离中心固定点越远,变形越大,而且模型的变形关于中心对称,在天线最外层,位移最大,不过变形较小,在可以接受的范围内,也与实际相符合。
![]() 参考文献
参考文献
参考文献
[[1]] 尤国强. 索网式可展开天线的形态分析与优化设计[D]. 西安电子科技大学. 2013.
[[2]] 曹罡. 基于空间热环境的可展开天线性能研究[D]. 西安电子科技大学. 2011.
[[3]] 冯长凯. 星载可展开机构的动力学仿真[D]. 西安电子科技大学. 2008.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



