(中铁十局集团第四工程有限公司,江苏省南京市,210046)
摘 要:随着我国高铁建设的推进,900T级铁路箱梁广泛采用,大型起重设备也得到前所未有的发展,MDEL900型搬运机就是箱梁吊装作业中的重要设备。随着时间的推移,箱梁大型吊装设备已进入“老龄化”,伴随而来的是各式各样的故障和风险,本文针对MDEL900型搬运机在作业过程中出现的转向故障进行分析,对可能产生转向故障的几种情况及改进方案进行探讨,以期能够为同业人士提供参考。
关键词:铁路箱梁;搬运机;转向故障;风险分析
作者简介:李德豹(1987年6月),男,汉族,黑龙江肇东人,工程师。
 MDEL900型轮胎式搬运机(图1)是超大型的起重设备,适用于高速铁路或客运专线32m、24m及20m双线整孔预制混凝土箱梁的吊运(从制梁台位到存梁台位,或从存梁台位到跨线提升站),或在预制场内为900吨运梁车装梁,还可以用于预制场箱梁预扎钢筋和内模的整体吊装。
MDEL900型轮胎式搬运机(图1)是超大型的起重设备,适用于高速铁路或客运专线32m、24m及20m双线整孔预制混凝土箱梁的吊运(从制梁台位到存梁台位,或从存梁台位到跨线提升站),或在预制场内为900吨运梁车装梁,还可以用于预制场箱梁预扎钢筋和内模的整体吊装。
MDEL900A型轮胎式搬运机主要由主梁、支腿、车架、吊梁小车、主动轮组、从动轮组、转向机构、动力系统、电气系统、液压系统、司机室等组成。
液压系统由行走驱动、转向、悬挂、起升、支撑等几大回路与液压辅助系统组成。
整机液压系统通过微电控制系统、CAN总线编码器和萨奥总线电磁比例阀控制,行走、转向和起升机构采用无级调速,实现了轮胎搬运机在启动和停机时保持速度平稳的变化,确保整机平稳起动和平稳制动,冲击小,稳定性好,保证了整机作业过程安全可靠。
我们公司于2008够买了一台MDEL900A型轮胎式搬运机,该机在使用过程中,频繁出现各类故障,特别是轮组转向故障,本文对轮组转向故障做一个浅析,为系统升级改造,解决轮组转向故障提供参考。
一.整机转向原理
1.1转向机构
![]()
 轮胎式搬运机设置电控独立转向机构,可实现原地90度转向、纵向走行和横向走行过程中的±15度转向——斜行、原地旋转。转向机构由转向油缸、转向支架等组成,如图2所示,转向油缸的缸体通过销轴与转向支架铰接,活塞杆端与悬挂总成中的转臂铰接,通过转向油缸的伸缩来实现轮组的转向。每个轮组上都安装有转向油缸,通过电子控制及电子反馈系统使每个轮组按设定的角度进行转动。可以保证每个轮组转向角度完全一致,并能在行进中微调。
轮胎式搬运机设置电控独立转向机构,可实现原地90度转向、纵向走行和横向走行过程中的±15度转向——斜行、原地旋转。转向机构由转向油缸、转向支架等组成,如图2所示,转向油缸的缸体通过销轴与转向支架铰接,活塞杆端与悬挂总成中的转臂铰接,通过转向油缸的伸缩来实现轮组的转向。每个轮组上都安装有转向油缸,通过电子控制及电子反馈系统使每个轮组按设定的角度进行转动。可以保证每个轮组转向角度完全一致,并能在行进中微调。
原地旋转用于调整整机的姿态,只能在出梁通道上使用。轮胎在原地进行90度转向时,无论重载或空载均应把支撑油缸支撑于地面,减小轮胎的压力和地面对轮胎的磨损。支撑油缸的活塞杆端通过球面接头与球面底座相联,使球面底座可以在±5º范围内摆动,从而适应路面不平的变化。
1.2转向原理
轮胎式搬运机转向过程中,要求每个悬架按照司机室控制器给定的角度转动,同时要求各轮组转向机构具有同步一致性,否则搬运机在行驶过程中会出现车架的卡滞现象,导致转向机构油缸、弯臂、轮胎等被破坏,或液压系统压力异常。每个轮组转向油缸都由一个独立的具有压力补偿功能的电液比例总线阀进行控制,其输出的流量与总线阀阀芯开口成比例,与负载无关。各轮组的电液比例总线阀通过两个控制器EPEC2023的CAN2口连接,与连接在CAN1口的转角绝对值CAN总线编码器组成闭环反馈控制系统,以确保各轮组能够转到指定的角度。
转向系统中的电液比例阀和转角编码器采用CAN总线结构设计,节省了控制器的端口,简化了控制线路,还可提高系统的可靠性。然而随着搬运机使用年限的增加,这种设计理念带来的弊端逐渐显现。
二.搬运机转向故障分析
随着中国高铁的飞速发展,国内第一代900t箱梁的大型设备日渐陈旧,在这个过程中,各式各样的问题都开始呈现出来,在这些问题中,最为重要且后果最为严重的是转向机构的故障,当搬运机吊运900t箱梁过程中,频繁出现轮组无法转向或乱转向的情况,搬运机不能正常作业,将导致整个制架梁工作停滞。为此,我们不得不认真思考并想办法解决轮组转向问题。
2.1转向系统分析
转向系统是由各转向油缸采用独立转向的方式实现,各油缸动作由微电系统控制比例换向阀驱动整车转向。转向油缸由萨奥电液比例总线阀控制,A、B两侧各14组轮组分别由两个控制器的CAN2口控制,控制器将各轮组对应电液比例总线阀的开度数据发送到总线CAN2![]()
 上,电液比例总线阀按接收到的指令控制转向油缸动作,实现轮组转动,转向编码器将各轮组的转向角度通过总线CAN1反馈回控制器,进行闭环调节轮组角度。轮组动作逻辑及液压原理如
上,电液比例总线阀按接收到的指令控制转向油缸动作,实现轮组转动,转向编码器将各轮组的转向角度通过总线CAN1反馈回控制器,进行闭环调节轮组角度。轮组动作逻辑及液压原理如
图3所示。
通过分析,可能导致转向故障的情况如下:
2.2. 电液比例总线阀原因
转向问题主要集中在萨澳电液比例总线阀上,故障现象为控制器给出控制指令后,电液比例总线阀无输出,轮组转向油缸无动作。根据现场处理经验,重复断电重启电液比例总线阀多次或手动摇电液比例总线阀手柄多次后,总线阀可能会正常工作一段时间,而后故障又会重新出现,导致频繁出现转向故障情况。
究其原因:
萨澳电液比例总线阀内部带反馈控制,控制精度非常高,对液压油的清洁度要求高,而国内液压系统集成厂商设计生产的液压系统达不到该总线阀的要求,导致总线阀内部反馈检测回路出错,总线阀内部自我保护,停止工作;
萨澳电液比例总线阀电气连接采用2套接插件,电源和信号一进一出结构,总线阀内部电路板设计缺陷,引起总线阀内部虚接,2套接插件之间不通,导致该总线阀后续无电源和信号;
整机油液污物比较多,容易污染电气线路液压管路,导致转向故障。
 2.3电气控制分析
2.3电气控制分析
![]() 整机28个轮组转向编码器、4个控制器以及4个卷扬编码器一起构成整机微电系统主网络。28个轮组转向编码器安装于各自轮组立轴上方,编码器与立轴采用拨杆拨叉连接方式传动,保证了轮组与编码器转动的同步一致性,各编码器采用金属罩防护。
整机28个轮组转向编码器、4个控制器以及4个卷扬编码器一起构成整机微电系统主网络。28个轮组转向编码器安装于各自轮组立轴上方,编码器与立轴采用拨杆拨叉连接方式传动,保证了轮组与编码器转动的同步一致性,各编码器采用金属罩防护。
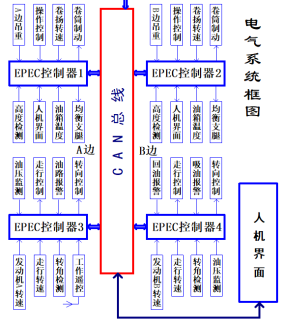
为简化系统线路,便于维护,电气系统主控部分由4个EPEC控制器组成基于CAN总线的分布式控制系统(图4)。EPEC控制器是一种专门用于工程机械电液控制的PLC装置。所有的动作指令由司机操作后通过EPEC控制器下达命令。系统动作采用电位器控制,控制电压设置为:0-5v,2.5v作为轮组左转和右转的中间分界值,为了避免因为操作手柄的细微振动导致系统错误动作以及电压不稳定导致错误动作,系统设置了一个±0.3(2.2-2.8v)的区域作为死区,即控制器在感应到手柄给了指示后,开始动作,但是,为避免上述所说的错误信号,在电位器给出电压在2.2-2.8v之间时,系统不会下达动作指令,直到超过死区系统才会做出相应的反应。
同时,为了能更精确的控制器轮组转角,系统还安装了转角编码器,能实时的反应各轮组的转角情况,编码器采用绝对值CAN总线编码
器,编码器的分辨率为单圈13位,将轮组360转角分为213=8192份,如此的高精度确保精确反应转角实际情况。
编码器具备心跳指令功能,系统设定的门槛值为500,在连续两个扫描周期内,如果EPEC收到的数据有突变或者超过门槛值则视为编码器故障,系统会显示故障信号。
微电系统由28个轮组转向编码器、4个控制器、4个卷扬编码器及触摸屏CAN总线网络,网络线路总长达400米,网络上CAN节点多、线路长,为提高网络稳定性,总线波特率设置为50Kbps,实测总线负载率达到80~90%。这种情况下,总线节点容易掉线,特别是转向编码器。编码器掉线后,轮组会出现转不动或乱转的情况。
此外,还有机械故障导致轮组转向问题,这类故障肉眼即可鉴别,在此不再讨论。
三.系统升级改造
MDEL900型搬运机已完成三个梁场的搬梁任务合计约1568孔,目前液压和电气系统老化严重,故障频发,需要进行升级改造。在本次搬运机液压和电气系统改造中,需提高该起重机的技术水平,电气和液压系统设计更人性化,操作要求简洁方便,具备故障状态和部位提示功能,方便维护。为提高该机的可靠性与实用性,要求主要从以下几个方面来实现。
3.1液压部分
对整机转向油缸萨澳电液比例总线阀进行更新换代,提高设备稳定性。因整机原液压系统故障率高,问题主要集中在萨澳电液比例总线阀上,故障现象为控制器给出控制指令后,电控模块无输出,重复断电重启液压比例模块多次或手动摇液压比例阀手柄几百次后,可能会正常工作一段时间,而后故障又会重新出现。本次液压系统改造需根除此类故障,将萨澳比例电磁阀全部更换为哈威脉宽调制(PWM)比例阀,液压系统其他部件亦相应更换,保证液压系统可靠、耐用。
3.2电气部分
改变微电系统CAN总线结构,将单侧14个轮组转向编码器、2个卷扬编码器构成CAN子网络,6个控制器EPEC4602及触摸屏构成CAN主网络,CAN网络简化,节点建少,总线波特率设置为125Kbps,实测总线负载率低至30%,网络更稳定。
为保证系统精度,提高系统抗干扰能力,所有编码器采用CAN总线绝对值编码器,不允许选用其他输出类型信号编码器(比如电压信号,电流信号等),转向编码器单圈分辨率不低于13位。为方便司机操作,保证操作界面的美观和人性化,升级改造后触摸屏采用10吋彩色屏。
系统增设故障处理系统软件,减少现场故障排插时间。搬运机升级后系统具备故障诊断及应急屏蔽处理功能,出现故障时,系统给出故障部位信息及故障初步处理办法。触摸屏上做屏蔽轮组转向功能,当转向编码器损坏或故障后,可以屏蔽对应的转向轮组,使得搬运机能够在不影响作业安全的情况下,进行应急工作。增加故障处理功能,大大方便现场的使用。
四.结束语
综上所述,MDEL900A型轮胎式搬运机在使用过程中容易出现的几种转向故障进行分析,从几个方面分析转向故障的原理,并提出了升级改造的具体方案和要点。实践表明,系统据此升级改造后,最大限度的降低搬运机轮组转向故障的发生,使旧设备焕发新生机,为促进我国铁路事业安全建设发挥了重要作用。
参考文献:
[] 陈启. 线控转向系统前轮转角与路感模拟研究[D]. 西华大学, 2016.
[2] 刘洪亮,皮华峰,凡创. 基于dsPIC6014A的总线型液压比例电磁阀控制器设计[J]. 长江大学学报(自科版), 2015.
[3] 王翠. 320吨特种平板车转向系统设计研究[D]. 武汉理工大学, 2013.
[4] 袁超峰. TLC450运梁车液压系统设计及行走液压系统仿真分析[D].燕山大学, 2012.
[5] 宋娟,陈会伟,刘纪新. 基于CAN总线和以太网的矿用UPS监测系统设计[J]. 煤矿机械,2015,36(10):275-278.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



