浙江工业职业技术学院 浙江省绍兴市 312000
摘要
本文针对现代工业生产活动中对震动检测的需求,结合内嵌式光纤法布里-佩罗干涉仪(FPI)反射光谱在拉伸应变和压缩应变中的不同表现,以FPI作为应力传感器,设计了一种利用嵌入式技术进行数据采集、信号解调和分析的系统与方法。基于此,可满足利用FPI对高频震动进行检测的需求。
关键词:震动检测;法布里-佩罗干涉仪;嵌入式技术
1.概述
本光纤应力传感器如图1-1所示,由双端镜面单模光纤(SMF)制成的内嵌式法布里-佩罗干涉仪(FPI)组成。FPI的干涉光谱呈现出一连串条纹,干涉光谱随传感器形变状态而改变。当其发生拉伸应变时,条纹发生红移;当发生压缩应变时,条纹出现蓝移。因此,通过观察和统计干涉光谱位移变化可推断应变状态从而间接检测物体震动水平。
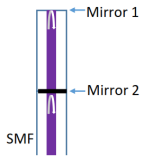
图1-1 利用SMF构建的FPI
2.系统设计
整体系统设计如图2-1所示。系统利用分布反馈式激光器作为光源,采用光电探头接收传感器反射的光信号并将其转换为电压信号。为保证至少两个波峰或波谷被设备试别,系统还包含了一个波形发生器用以产生一个10KHz三角波信号,该信号将与光电探头产生的电压信号同被信号采集分析设备所接收。

图2-1 系统框架简述图
传感器探头被安装在高弹尼龙材料外壳内,可通过螺栓与被测物体连接,也可利用夹具固定安装于被测物体上。因FPI内嵌于光纤内,传感器可与光源分离布置,仅需以单模光纤相连接,安装距离可不小于5米。
传感器产生的干涉图因其能量分布特性,可驱使光电探头产生电压信号。绘制该信号可得波长-强度参数下的正弦波信(后称波-强图)。传感器因受力发生应变时,构成FPI的Mirror1与Mirror2间距离发生细微变化(压缩增大间距,拉伸减小间距),此变化将影响FPI产生的干涉图形。具体描述,即压缩传感器外壳使其发生压缩应变时,干涉图像条纹蓝移,拉伸传感器外壳使其发生拉伸应变时,干涉图像条纹红移,同时其强度仅有细微变化。相应的,绘制波-强图可观测到明显的相位变化且强度变化极小,如图2-2所示。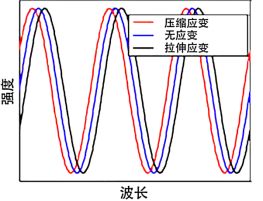
图2-2 应力下电压信号
由上可知,获取、绘制与观测电压信号相位变化即可了解传感器应变情况。将震动施加于传感器之上,可视为传感器受应力类型连续变化的情况,此时波-强图在X轴上可观测到连续的峰-峰间(或谷-谷间)距离变化。
采用专用嵌入式系统可简化获取、绘制与观测的流程。本系统采用基于TMS320F28335 DSP(后称F28335)处理器的嵌入式系统完成该过程。此处理器内嵌有一个12bit模-数转换器(ADC)与两个暂存器,可同时对两组模拟信号进行采样并将数据上传至暂存器内等待ADC依次转换为数字信号。前文所提10KHz三角波将于此处产生作用。光电探头产生的电压信号与固定频率的三角波信号将在同一时间被采集与存储。被存储的信号经过模数转换后可由嵌入式系统直接绘制或生成文本文档后通过计算机绘制。三角波信号为基准信号,对比光电探头电压信号(后称探头信号)峰、谷位置与三角波峰、谷位置,可定性获得传感器震动情况。同时,统计两个三角波波峰内探头信号数量,可定量计算震动频率。
3.信号采集与分析
本系统采用F28335处理器提供的连续运行模式采集数据,即不间断采样至SRAM中存储并将采样数据进行AD转换。由文献【3】可知AD转换进行数据转换,同时启动DMA读取转换后的数据。为保证探头信号与三角波信号在同一时间采样,使用ADCINA0和ADCINB0端口作为信号输入端口,两路数据将被单独存储在采样保持器A与B中(S/H-A和S/H-B)。配置AD控制寄存器ADCTRL1和ADCTRL3,选择级联序列器的同时采样模式。在此模式下,配置CONV00=0x0,系统将同时对前文所提两个端口输入的信号进行采样,并将收集的信号存储到相同的采样保持(S/H)电路中。
因采样起始时间与信号发生时间并不严格同步,完成采样后首先需要找到三角波上升沿与波峰位置。基于前期对三角波波形采样分析的结果,其波形边缘较为平整,可通过寻找点T(i)满足同时大于点T(i+5)与T(i-5)找到波峰,顶点左侧为上升沿。通过应用相同的方法,可以确定波谷的位置。输入三角波的频率为10KHz,基于香农采样定理(B,本次实验采样频率为6.25MHz。受板载存储器空间限制,设备每次对2.4个周期三角波信号进行采样与转换,确保数据中至少包含一个上升沿。
完成上述步骤和,便可以三角波信号做基准,为探头信号重新设定坐标系,即横坐标为采样点序号,纵坐标为电压。以与前文相同的方式找到探头信号波峰、波谷。通过比较同坐标系下探头信号波峰位置和三角波波峰位置,应力传感器应变情况将被有效获取。需要指出的是,因采样频率远高于输入信号频率,本次实验可被视为所有“有效信息”不会被漏采。
4.实验结果
实验第一部分为漂移测定。本系统采用的F28335处理器可能存在采样数据漂移的情况,实验前先进行漂移情况测定。测试组为1.15V电压5KHz方波信号与1.5V直流电压信号。每个信号均采样1500次并绘图,放大细节后可见采样后结果与实际输入存在约47mV误差,该误差即为采样情况向右的漂移。
实验第二部分为单一方向应力下波形变化实验。本系统允许的采样范围为0-3V,精度为0-4095;三角波电压为波峰2.80V,波谷1.92V,落差0.88V;探头信号波峰为1.5V,波谷为0.94V。三角波信号采样结果与细节如下图:

图4-1 三角波采样结果
上图中横坐标未采用数编号,纵坐标未电压,对三角波的采样结果符合预期。放大细节后,在上升沿与下降沿存在毛刺,毛刺最大值未超过波峰,根据前文提到的算法,毛刺对震动定性与定量无影响,故忽略。
实验通过对传感器施加与释放压力引起传感器压缩应变与拉伸应变。下图为探头信号采样结果:

(a)

(b)
图4-2 (a)压缩应变下探头信号;
(b)拉伸应变下探头信号
上图中横坐标为采样数编号,纵坐标为电压。观察图(a),可见约第125次采样时探头信号为波峰,第260次采样时探头信号为波谷。观察图(b)可见约第15次采样时探头信号为波峰,第185次采样时探头信号为波谷。 在施加压力-释放压力的过程中,传感器外壳会发生肉眼不可见的状态变化,即由初始形态至压缩应变,再由压缩应变反弹至拉伸应变,经过多次震荡释放压力后回到初始形态。在该过程中,FPI将被反复挤压与拉伸,理论上,若采样数足够,将获得一组波长连续变化的探头信号。在实际情况中,为减小传感器与震动信号产生共振的概率,传感器外壳采用了刚性较好的尼龙材料,单次施加压力在实际情况下并不能造成其多次震荡。因此,实验采用了多次施加压力,多组采集信号,单组采样数为350的方法。由图3-3(a)(b)可见压缩传感器过程中探头信号波长减小,释放压力过程中探头信号波长增加的现象,证明传感器可以检测到压缩应变与拉伸应变。
实验第三部分为震动检测。将传感器固定于3mm厚度铝盘上,通过震动铝盘施加应变。作为对照,一组光纤光栅应变仪(FBG)被设置在本系统传感器旁。实验结果如下图。

图4-3 3KHz震动检测
由上图可见,本系统可检测到该频率震动,且相较于传统FBG,其实验结果更为理想。
5.结论
本系统利用DSP处理器对传感器探头信号进行采样与整形,利用三角波信号寻找探头信号的波峰、波谷位置,从而推断波长的变化。由实验可知,即使在较高频率水平下,系统仍然能够正确检测到传感器的应变情况。应DSP处理器本身硬件限制,应力要保持4.3微秒方可被系统采集,同时本系统只能同时支持两个传感器探头。更换AD采集设备可提升本系统能力,但成本也会显著增加。
参考文献
【1】张荆沙 张琰.基于嵌入式技术的光纤干涉型传感器智能控制研究[J]. 激光杂志,2022,43(10): p .193-196
【2】鲁昕瞳. TMS320F28335外部中断分析与研究[J]. 中小企业管理与科技, 2021(10): p .194-196
【3】张文磊 赵洪亮.基于TMS320F28335的高速数据采集电路设计[J]. 电子设计工程. 2013,21(17):p .77-79
作者信息:郦亦含,男,汉族,1990-02,浙江绍兴人,浙江工业职业技术学院,助教职称,无人机应用技术专任教师,研究生学历,硕士学位,研究方向:无人机机载电子设备开发与无人机应用技术教学研究。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



