诺博汽车系统有限公司保定徐水分公司 河北 保定 071000
摘要:针对因垃圾分类投放的不合理性,而导致的各种环境污染问题。本文设计了一种城市街道智能垃圾分类系统,该系统以垃圾分类资源优化和调度为主要目标,以数据为核心,在物联网技术、图像识别、人工智能的基础上,利用Tensorflow平台的图像处理技术,建立垃圾分类模型,通过人工神经网络技术,实现垃圾合理分类,并降低垃圾处理成本。预期的理想结果:当智能垃圾分类系统满载检测功能正常工作时,通过超声波模块测量剩余容量,可以在不同范围内显示绿色、黄色、红色的信息,工作人员在Web客户端上进行实时监控。
关键词:垃圾分类; Python ; 树莓派; 图像处理
引言
近年来。随着经济的发展和消费能力的提高,同时也让资源与环境受到了严重破坏。这种现象与垃圾分类投放时的不合理直接相关。人们日常生活中的垃圾主要包括有害垃圾、厨余垃圾、可回收垃圾以及其他垃圾。合理地进行垃圾分类是有效进行垃圾处理,减少环境污染与资源再利用的关键举措,也是目前最合适最有效的科学管理方式。
为此,在图像识别的基础上,通过借助智能信息平台,设计了一款基于智能平台的新型垃圾分类系统。该系统主要由树莓派主板、超声波传感器、步进电机、电源适配器及PC端服务器组成。预期实现垃圾智能识别分类,提高人们垃圾分类投放意识,同时避免人们错误投放而产生的环境污染。
1 系统总体设计及功能介绍
1.1系统总体设计
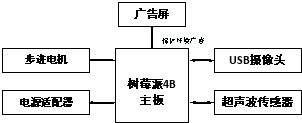
系统包括智能垃圾分类装置、服务器存储数据、Web客户端显示。智能垃圾分类装置对摄像头采集得到的数据进行处理,完成识别、分类及满载检测。后端通过服务器存储分类结果,是否满载信息等数据。在Web客户端上显示垃圾桶信息,实现数据监控。智能分类装置包括树莓派主板、传感器检测系统、电机执行装置。

在该系统中,主控板是硬件部件。此装置采用的是树莓派4B开发板,基于LinuX系统内核,并搭载的ARM处理器。检测装置由红外传感器、超声波传感器和USB摄像头构成。利用超声波模块检测是否有垃圾投入,有投入则打开摄像头,USB摄像头对投放区域拍照,将图像数据流进行推理,图像识别完成,控制步进电机打开识别垃圾种类的垃圾桶与识别区域的垃圾开关,使垃圾沿斜坡向下滑动,落在相应垃圾桶中,超声波模块测量垃圾桶剩余深度,通过距离分为绿色、黄色、红色。
1.2 系统功能分析
基于Tensorflow平台+树莓派的城市街道垃圾分类系统主要实现功能:
1.垃圾智能识别与分类。通过摄像头采集照片获取数据,将“Tensorflow 定制 AI 训练平台”实现对城市街道的垃圾进行智能识别以及分类。可以将有害垃圾、厨余垃圾、可回收垃圾、其他垃圾,在投放进智能垃圾分类设备后进行识别垃圾进行分类。
2.数据储存及显示。通过HTTP协议开发服务器,采集垃圾桶内数据,将获取的数据结果储存至服务器,通过Web客户端发起请求访问服务器。该设计架构主要针对Web服务端开发一套程序代码即可,而客户端可以直接使用浏览器技术进行访问,并在Web客户端上实时显示分类信息,由于B/S架构基于公版的HTTP协议进行数据交换,所以在程序维护的时候只需要维护一套服务端代码即可。
3.满载检测。实时监控垃圾桶内剩余可用容量,判断垃圾桶内容量是否超出警告线,若达到,则在Web客户端显示垃圾满载的标志,提示工作人员垃圾桶已满载并将其清理。
2 硬件模块选型与设计
2.1主控制器的选取
本系统采用的是控制器为Raspberry Pi主板。系统采用的ARM架构设计的一款CPU型号BCM2711芯片,主板还集成了DDR4代闪存容量为4GB。2个USB3.0/2个USB2.0,以及802.11ac(2.4/5.0)与千兆网口。集成了能够满足计算机运行所需的CPU、图形处理模块及音频功能等大部分硬件,工作频率达到 1.5GHz,保证能够在功耗范围内发挥出最佳的性能。树莓派系统内部自带有Python开发环境,可省去搭建环境的时间。系统的整个工作过程与树莓派协同工作,服务器通过内部局域网连接到树莓派,保证实时检测垃圾桶满载数据状况。
2.2 CSI相机
莓派CSI接口具有GPU的处理能力,同时配合CSI相机,图像质量较好,光线不足的情况下,可以明显提高分类的速度与精确性。
2.3超声波模块
超声波传感器是利用超声波的特性研制而成的传感器,应用非常广泛。它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等优点。测量范围在4米以内,满足系统使用需求。超声波模块通过计算声音传播的时间来实现对距离的测量, 按照:
![]()
实时检测垃圾桶内垃圾容量
通过与树莓派GPIO中的USART针脚连接。由树莓派记录并发送至服务器,从而实现客户端信息共享,客户端可实时查看数据。
2.3步进电机
步进电机输出转矩,齿轮通过平键与步进电机连接,步进电机脉冲频率越快齿轮转速越快。树莓派输出PWM波信号控制电机转子转动角度,其输入脉冲与线位移成正比,达到预设目标,控制齿轮的运转状态。同时齿轮又可根据所设目标位置实时调整转速,输出的PWM波影响电机脉冲数,进一步实现对速度的调控。
2.4齿轮与齿条
步进电机输出的角位移通过齿轮与齿条传动转换成定量的线位移,计算公式如下:
![]()
就可以算出传动比i;
通过调整传动比i得到实际合适的速度与力矩:
![]()
选择合适的步进电机。
3 系统软件设计及实现
3.1系统软件框架
1)垃圾分类机构设计思路及原理图

本系统的设计主要基于Tensorflow实现自动垃圾识别与分类,满载报警等功能。垃圾识别模块以Tensorflow为训练模型的软平台,在树莓派4B开发板上部署。
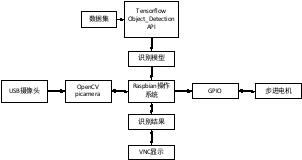
系统以树莓派4B为主控器,使用树莓派4B的CSI接口摄像头采集数据。识别采用谷歌开源的对象检测API Tensorflow Object_Detection,选取轻型的Mobilenet-SSD模型为预训练模型;当识别到垃圾时,树莓派控制舵机转动将垃圾投放到指定的垃圾桶。
算法以谷歌开源的对象检测API Tensorflow Object_Detection为核心,在Windows10系统上训练和调优模型,此后将训练的模型部署到树莓派4B开发板上。系统调用OpenCV-Python以及Picamera模块驱动摄像头实现实时图片采集;通过改变GPIO输出的PWM状态来控制步进电机投放垃圾。
3.2 系统样机设计
使用软件SOLIDWORKS进行零件的建模、装配、选材、及有限元分析。确定理论可行的情况下,导出每个零件图与装配图,并根据图表进行各零部件的加工,最终完成样机的装配。完成样机装配之后选择合适的地方安装传感器并布置线路,随后程序代码植入。最后进行样机调试,并在过程中实时进行记录,判断其功能是否到达设计要求。

材料选取:齿轮使用铸铁材料,要求强度较高,传递较大扭矩。主轴使用45钢,经调质和表面高频淬火后可获得较高的综合力学性能和耐磨性。垃圾桶支架使用铸铁,质量轻强度高不易变形。垃圾桶使用不锈钢(薄皮)具有良好的物理机械性能,防止生锈,相比塑料不易损坏;垃圾桶外壳采用热板钢材,厚度 1.5MM,抗压强度高,不易变形。
4 结 语
本文基于树莓派控制设计了一款自动、可靠的智能垃圾分类装置,采用Tensorflow神经网络框架实现垃圾分类回收处理,以为工作人员提供了客户端实时访问,降低劳动难度。具有结构简单、操作灵活、安装方便的优点,打破了传统的回收方式,以化被动为主动的回收的方式接收居民垃圾,相信在不久的将来会被进一步推广使用。运用“互联网”采取合理有效的垃圾分类措施,在提高了垃圾分类效率的同时,也能够降低垃圾处理难度,减少垃圾处理成本,避免土地资源的浪费,使得环保意识真正融入了居民生活,具有社会、经济、生态等多方面的效益。
参考文献 :
[1] 许金红 . 中国城市生活垃圾分类管理的研究 [D]. 西北大学, 2011.
[2] 牟晓东,牟奕炫 . 借助树莓派超声波“测距”的物联网数据采集 实验 [N]. 电子报,2020-07-19(004).
[3]毛星云,冷雪飞,等.OpenCV3编程入门[M].北京:电子工业出版社, 2015:304-305.
[4] 刘丽娜. 垃圾分类行业现状及未来发展趋势分析. 资源节约与环保.2019(10)146.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



