重庆交通大学
摘要
在码头建设过程中,由于设计、施工及其自身因素等影响,会出现一些裂缝。且码头裂缝受长期动荷载作用易在长度、宽度和深度方向出现演化,导致码头使用寿命缩减,耐久性能降低,安全受到威胁。目前大多是人工测量裂缝,这种人方法效率低下,且由于受到操作者经验的影响,对裂缝测量的精度也大大降低。针对上述情况,本文提出一种基于机器视觉的码头裂缝识别技术,首先利用杭州邦港航码头多功能动力/静力加载系统进行加,使用高清红外摄像头拍摄不同荷载工况下的裂缝区域,对于录制好的视频,分帧处理后,代入程序进行训练和分析。
关键词:图像识别 神经网络 图像预测
一.概述
近年来,我国港口基础设施的规模、吞吐能力、服务水平、结构布局等得到了不断提升,但港口在建设过程中,由于设计、施工及其自身等原因,会出现一些裂缝。在投使用时就发现,在长期受动荷载作用下,将导致裂缝尖端附近的应力场和位移场出现复杂的变化,从而引起应力集中和应变能释放,当裂缝尖端应力强度因子大于材料断裂韧度时,混凝土筑成的港口结构裂缝会在长度、宽度和深度方向出现演化,而在动荷载和环境共同作用下将会加速裂缝的扩展,导致港口使用寿命缩减,耐久性能降低,安全受到威胁。目前大多是人工测量裂缝,这种人方法效率低下,且由于受到操作者经验的影响,对裂缝测量的精度也大大降低。因此,现急需一种智能化且精度更高的码头裂缝识别技术。
二.技术原理
本文采用深度学习中的卷积神经网络进行对采集的图像的训练和学习,值得一提的是我们引用了最短投影法与正交投影法相结合的一种新的混合方法,该混合方法是通过识别一对在接近正交方向时距离最短的点来获得裂缝宽度。
三.应用分析
1.1 码头模型
模型外形尺寸完全依据重庆果园港二期码头工程的施工图确定,在考虑实验室条件及实际计算值,按照确定的几何比尺1:10进行设计施工。如图1、图2所示。

图1 码头模型
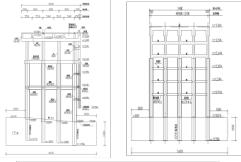
图2 码头模型断面图
1.1.2 数据采集装置
利用DS-IPC-B12HV2-IA(200万1/2.7"CMOS)红外阵列桶型网络摄像机采集数据。
1.1.3 实验加载设备:
杭州邦威港航码头多功能动力/静力加载系统

图3 作动装置

图4 加载现场
1.2试验步骤
通过操作杭州邦威港航码头多功能动力/静力加载系统,设置加卸载相关参数,按照2KN、4KN、8KN、10KN、12KN、15KN先后对橡胶护舷进行加压处理。同时在码头模型旁同一竖线方向固定一台红外阵列桶型网络摄像机进行拍摄并记录混凝土柱试验过程中裂缝的产生过程和相对变形量,对于录制好的视频,分帧处理后,代入程序进行训练和分析。
2. 试验结果与分析
采集大量不同裂缝图像,进行机器训练和识别,然后通过几何算法计算裂缝的宽度和长度,通过计算的到的裂缝的像素宽度和像素长度之后,在经过标定像素和实际长度的比例,单位为mm/pix,像素宽度或像素长度乘以比例就可以得到实际裂缝宽度和长度值。如图12得到的裂缝数据为:平均像素宽度:18.8741,最小像素宽度:5.6568,最大像素宽度:38.5691,像素长度:255.3591,经过测算实际长度和像素长度的比例为:1.2217mm/pix,在计算的到实际数据为:平均宽度:23.0585mm,最小宽度:6.9109mm,最大宽度:47.1199mm,裂缝长度:311.9722mm。

图5 2KN荷载下裂缝分析


图6 4KN荷载下裂缝分析


图7 6KN荷载下裂缝分析

图8 8KN荷载下裂缝分析

图9 10KN荷载下裂缝分析


图10 12KN荷载下裂缝分析

图11 15KN荷载下裂缝分析
四.结论
本文针对现有的码头裂缝检测方法实时性差、智能化低等问,提出一种基于机器视觉的码头裂缝识别技术。该技术可以对码头裂缝进行识别,并且通过几何算法计算裂缝的平均宽度和长度,精度可观。
参考文献
[1]林永刚,雷明,沈鑫.不同强度试件剪切破坏过程的演变分析[J].山西建筑,2021,47(24):30-33.
[2]胡扬帆,李军.码头水工工程大体积混凝土施工裂缝控制技术[J].珠江水运,2021(16):43-44.
[3]陈静.基于模糊神经网络的码头结构健康监测研究[J].水道港口,2021,42(04):524-529+555.
龚悦(2002—8 ),女,汉,重庆巫溪人,环境科学与工程专业,本科
覃礼健(2001—8 ),男,汉,广西玉林人,计算机科学与技术专业,本科
王照堃(2004—1 ),男,汉,安徽六安人,水利专业,本科
徐德梅(1999-11),女,汉,贵州毕节人,环境科学与工程专业,本科
殷月(2003—9 )女,汉,重庆万州人,工程造价专业,本科

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



