成都鸿基房产测量咨询有限公司 邮编: 610000
四川省德阳地质工程勘察院邮编: 618000
中国电力工程顾问集团西南电力设计院有限公司邮编: 610000
摘要:三维激光扫描仪扫描所获得的点云数据,作为底层的基础数据,在智慧城市大脑建设及真三维数字化城市中扮演着越来越重要的作用,其广阔的应用前景现已成为众多科研工作者的研究热点。将三维激光扫描技术应用在老旧小区建筑测绘中,并进行相关的应用分析,以期望为三维激光扫描技术工作者提供有益参考。
关键词:三维激光扫描;点云数据;老旧小区;建筑测绘
引言
三维激光扫描技术,也称为“实景复刻技术”[1],这一技术是近几十年来迅速发展的一项全新的测绘技术,已成为目前世界上最先进的对实体场景扫描复刻进行数字化存储的技术之一。该技术通过三维激光扫描仪对目标进行激光点云扫描,获取与现场尺寸完全一致的三维“点云”数据,然后利用数据处理软件对实体场景建立真三维实景模型,其无触碰、高精度、高效率的扫描场景数据[3],为老旧小区改造、历史文物建筑保护、考古、林业监测、地质灾害监测等提供了精准的现场实景数据[4-7]。
1基本理论
三维激光扫描仪主要由高精度激光测距系统,配上一组以均匀角速度旋转的反射棱镜组成,同时也搭配了控制和校准部件、时间计数器、数码相机等,部分还集成了GPS等功能。其拥有一套独立的坐标系统,原点位于仪器中心,X轴与Y轴所构成的平面为横向扫描面,Z轴垂直于横向扫描面与X、Y轴构成右手坐标系,激光扫描仪系统所获取的原始数据不仅仅只有两个角度观测值和一个距离值,同时还包含目标点的放射强度,用于给目标点匹配颜色(假彩色)。
2技术原理及点云数据
2.1三维激光扫描技术原理
三维激光扫描仪是无合作目标激光测距仪与角度测量系统组合的自动化快速测量系统[8],在复杂的现场和空间对被测物体进行快速扫描测量,直接获得激光点所接触的物体表面的水平方向、天顶距、斜距和反射强度,自动存储并计算,获得点云数据。最远测量距离一千多米,最高扫描频率可达每秒几十万,纵向扫描角θ接近90°,横向可绕竖轴进行360°全景扫描。
地面三维激光扫描系统主要由三部分组成:扫描仪、控制器(计算机)和电源供应系统。激光扫描仪本身主要包括激光测距系统和激光扫描系统,同时也集成CCD和仪器内部控制和校正系统等。仪器通过两个同步反射镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,测量每个激光脉冲从发出经被测物表面再返回仪器所经过的时间(或者相位差)来计算距离,同时内置精密时钟控制编码器,同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值θ。
2.2点云数据
点云数据经过计算机处理后,结合CAD可快速重构出被测物体的三维模型及线、面、体、空间等各种制图数据。点云数据以某种内部格式存储,常见的有TXT、OBJ、STL、PLY、PCD、LAS、RCS格式等。在点云数据基础上可开展点云数据编辑、扫描数据拼接与合并、影像数据点三维空间量测、点云影像可视化、空间数据三维建模、纹理分析处理和数据转换等功能应用。
3.项目实际应用
3.1作业流程
三维激光扫描仪在工作时,其棱镜镜头通过高速旋转并对周围环境物体进行激光波形扫描以及结合高清全景相机的图像拍照[10],进而高效的在极短的时间内完成大量的现场数据的采集和图片影像收集工作,将采集到的精准的点云数据和高清的现场全景照片相结合,得到高效、快速、精准的现场实景数据。
3.2测站布设
在实际操作应用中,必须先对外业数据进行收集。以项目某小区为例:由于目标小区为老旧小区,相关基础数据较为缺乏。现需进行老旧小区改造,需对老旧小区所有楼栋立面数据、小区道路及空地面积、小区建筑面积规模大小等进行精细测量。根据委托方要求,需要在较短的时间内提供出所有的数据信息。若通过传统的实地丈量法,工作量巨大、人员成本增加且时间周期也会相应延长。为尽快高效准确地完成委托方的要求,本项目决定采用三维激光扫描仪完成相关工作。
使用三维激光扫描仪进行外业数据采集,测站布设最为关键。测站布设位置的选取好坏会直接影响扫描的结果与点数,若点位选取不当的话,就会造成数据的连贯性和效果不完整,进而需要后期补充扫描。为有效提高工作效率,在项目进场前,需对小区情况进行现场实地勘察,绘制出小区大致的草图,拟定出相应的测站方案,并且根据需要设计其扫描的精细度区域分布,保证每一站点间有足够的重合度。
本次扫描工作,四人分为两小组,进行了约5个小时的数据采集作业,共扫描80站数据。各站点间距约为30米,在房屋凹凸面及转角处,加大扫描密度。选择这样的站点布置,可以最大限度地提高有效点云数量,减少重复的测量,提高工作的准确性和稳定性,达到了无死角、无遗漏、高精度及高效率的目的。
3.3点云数据处理
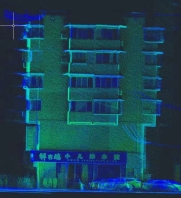
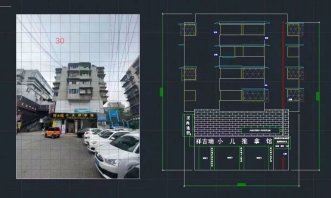
在外业数据采集站点扫描的同时,分段分批次的将采集的数据转给内业小组进行同步数据处理。内业处理过程中需要对扫描的站点采集的数据进行点云数据拼接工作。点云的拼接有靶位拼接、图像拼接、特征点拼接等,相对而言,基于特征点的点云视图软件自动拼接最为直观快捷。在自动拼接完成后对软件自动拼接的结果进行检查,若出现匹配度不高的点云站点,则需要再进行手动拼接。再进行检查确认后方可形成最终点云数据成果。项目点云及图件成果展示如下图:
3.4绘制图件及报告
根据项目要求,需要将拼接处理好的点云数据导入AutoCAD软件,利用绘图功能将每栋房屋平面、立面、小区道路等项目所需要的图件绘制整理出来,然后快速地计算出面积,最后汇总并出具测绘报告。
结语
本文分析了将三维激光扫描技术应用到老旧小区建筑测绘中,结果表明其能够大大提升工作效率及测量精度,并极具优势,有效解决了传统测绘效率低下、人工成本高和整体精度较低的问题。
参考文献
[1]邢汉发,高志国,吕磊.三维激光扫描技术在城市建筑竣工测量中的应用研究[J].城市勘测,2014,42(5):94-98.
[2]激光诞生50年:从红宝石激光器到人造太阳[J].科技传播,2010(10).
[3]杨必胜,董震.点云智能处理[M].北京:科学出版社,2020.6.
[4]陈巍巍,刘锟铭.三维激光扫描技术在旧城改造古建筑保护中的应用[J].江西测绘,2020(02):28-31.
[5]Stanton,T.W.;Ardren,T.;Barth,N.C.;Fernandez-Diaz,J.C.;Rohrer,P.;Meyer,D.;Miller,S.J.;Magnoni,A.;Pérez,M.“Structure”density,area,andvolumeascomplementarytoolstounderstandMayaSettlement:AnanalysisoflidardataalongthegreatroadbetweenCobaandYaxuna.J.Archaeol.Sci.Rep.2020,29,102178.
[6]Coops,N.C.;Hilker,T.;Wulder,M.A.;St-Onge,B.;Newnham,G.;Siggins,A.;Trofymow,J.A.EstimatingcanopystructureofDouglas-fifirforeststandsfromdiscrete-returnLiDAR.Trees2007,21,295-310.
[7]Tao,C.V.;Hu,Y.AssessmentofairborneLidarandimagingtechnologyforpipelinemappingandsafetyapplications.InProceedingsofthePecora15/LandSatelliteInformationIV/ISPRSCommissionI/FIEOS,Denver,CO,USA,10-15November2002.
[8]宋宏.地面三维激光扫描测量技术及其应用分析[J].测绘技术装备,2008,10(2):40-43.
[9]慈伟主,王喆,王路明,等.地面三维激光扫描工程应用综述[J].四川建筑,2019,39(6):261-264.
[10]朱曙光,何宽,周建郑.徕卡三维激光扫描系统在建筑物精细建模中的应用[J].测绘通报,2018,(2):154-156.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



