四川科特空间科技有限公司 四川省成都市 610213
摘要:倾斜摄影和机载LiDAR都是利用高精度航空遥感技术获取地形地貌信息,倾斜摄影通过倾斜航拍的方式,利用影像三角测量技术获取地面三维坐标信息,机载LiDAR通过激光束与地面交互,测量反射信号的时间差和传播距离,计算出地面点的坐标位置。基于此,文章主要分析了倾斜影像与LiDAR点云数据融合关键技术的应用。
关键词:倾斜影像;LiDAR;点云;数据融合;关键技术;应用
倾斜影像和LiDAR点云数据融合技术应用的重要性在于可以提高地理信息数据的精度、全面性、可视化效果和应用价值,有助于推动城市规划、土地管理、交通规划、灾害预防等领域的发展,具有重要的应用前景和推广价值。
1倾斜影像与LiDAR点云数据融合的流程
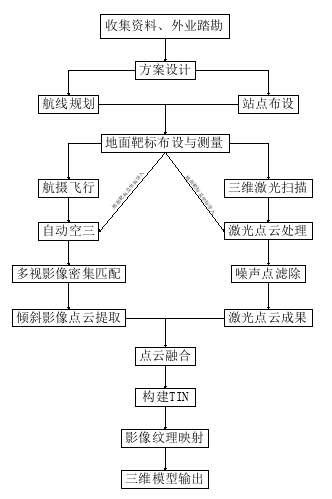
图1 融合建模流程图
首先,将机载LiDAR点云数据与其自身携带相机拍摄的正摄点云进行融合,形成LiDAR正摄点云数据,将正摄纹理信息赋予机载LiDAR点云;其次,将LiDAR正摄点云数据与倾斜摄影空三数据进行融合,形成融合点云数据,使倾斜纹理信息赋予LiDAR正摄点云数据[3]。
2数据融合技术
2.1多源数据的套合
多源数据之间的套合是指多种采集数据通过某种匹配方法,使之配准在一起。只有数据基准一致,才能实现不同数据间的融合。这里可通过两种数据套合方案实现:1)不同数据使用同一绝对坐标系,即具有统一数据基准;2)不同数据间无统一绝对坐标系,以手动添加控制点的形式,固定其中一类点云数据空间坐标不变,使其它点云数据通过手动控制点向固定数据配准。两种方法均可实现多种数据间的套合处理,使用哪一种应依据具体情况而定。若方便布设地面像控点,可使用方案一;若地形复杂,但地表特征明显,亦可使用后者。
2.2正摄影像与机载LiDAR点云数据的融合
机载LiDAR在航飞扫描的同时,正摄相机也参与了垂直角度的拍摄,形成正摄影像数据,此过程即将机载LiDAR点云与正摄影像之间的融合,赋予空间三维点云以光谱信息[4]。在该环节的融合处理中,由于二者具有统一坐标系,所有融合处理时不涉及不同数据间的配置与套合问题。
2.3 LiDAR影像点云与倾斜影像点云的融合
LiDAR影像点云与倾斜影像点云的融合是在倾斜摄影做完空三解算后进行的。点云数据融合前确保两种点云数据格式的一致性非常重要,这样才能保证点云数据融合的准确性和可靠性。在实际操作中,点云数据的格式种类比较多,如PLY、OBJ、3DS、STL等,因此需要将这些格式的点云数据转换为通用格式,常用的通用格式是*.las。 LAS格式是一种二进制的点云数据格式,具有良好的兼容性和可移植性,适用于大多数点云处理软件和工具[5]。因此,在进行点云数据融合之前,需要将2种点云数据格式转换为LAS格式,确保格式的一致性,以便于进行后续的点云数据处理和融合。可以使用一些点云处理软件,如CloudCompare、PDAL等进行点云格式的转换。 值得注意的是,转换点云格式时需要注意数据的精度和坐标系的一致性,以免在转换过程中对数据造成损失或误差,影响数据的融合效果。因此,在进行数据格式转换之前,需要对数据进行预处理,包括精度控制、坐标系转换等。该过程是为了赋予LiDAR空间三维点云侧面纹理信息,从而实现在精准的三维结构上进行纹理映射,形成精细化三维实景模型。其思路是将上述两种数据纳入同一套绝对坐标系中,完成点云融合。但这样仍然可能会出现两种数据分层的现象,这也是多源数据融合需要解决的关键问题。导致数据分层的原因,一是任何点云数据均含有观测噪点,在数据采集过程中均会受到外界干扰;二是多源数据采集系统的精度不一致,差异较大,从而形成了不可避免的系统误差。为了避免点云融合数据分层的情况出现,可以通过使用相同绝对坐标或手动添加控制点这两种具体方案进行解决。1)使用相同坐标系,地面统一布设像控点,或分开单独布设均可,只要两者具有相同的平面坐标系与高程基准,其点云融合精确度较高,能够有效避免融合后点云分层。2)若采用方案二手动添加控制点,一般是由于前期没有布设地面控制点,而是通过后期室内手动添加。这样则需要在手动添加控制点后进行概略解算,然后经多次空三解算以精确融合[6]。需要说明的是,手动控制点应选择较为平坦的特征点,而具有一定高度或特征不明显的点位不宜作控制点使用。当然,无论使用哪种方案,在数据融合前均需要对自身数据进行去噪处理,以精化有效数据,避免分层,到达更好的融合效果。
3案例分析
倾斜摄影和LiDAR技术是近年来地理信息领域的热门技术,两种技术各有优劣,但是结合起来可以形成更为完整的地理信息。下面介绍一个倾斜影像与LiDAR点云数据融合关键技术应用的案例。清远市城市三维建模项目是倾斜影像与LiDAR点云数据融合的典型应用案例。该项目通过对清远市区域进行倾斜摄影和LiDAR数据采集,获取了高精度的倾斜影像和点云数据。然后采用倾斜影像和LiDAR点云数据融合技术,将两种数据进行精准匹配和配准,形成了高精度的城市三维模型。该模型具有高精度、高分辨率、高真实感等特点,可以在城市规划、土地管理、交通规划、灾害预防等领域中得到广泛应用。倾斜影像和LiDAR点云数据融合是该项目的关键技术。该技术主要包括以下几个方面:(1)数据采集技术。采用倾斜摄影和LiDAR数据采集技术,获取高精度、高分辨率的倾斜影像和点云数据。(2)数据处理技术。采用点云数据处理软件和倾斜摄影数据处理软件进行数据的预处理和配准,确保两种数据的精确匹配。(3)数据融合技术。采用数据融合算法,将倾斜影像和LiDAR点云数据进行精确匹配和配准,形成高精度、高分辨率的城市三维模型。(4)三维建模技术。采用三维建模软件,对融合后的倾斜影像和LiDAR点云数据进行建模,形成高精度、高真实感的城市三维模型。
4结语
多源数据的融合处理方案,是目前应对有高精度三维实景建模要求的较好的解决方案。通过案例,给出了机载LiDAR影像点云与倾斜影像点云的融合结果。在建筑风格多元化的今天,测绘数据融合处理方案在一定程度上确实解决了精细化实景建模的技术瓶颈,而从融合类别上看,本研究尚未探讨空地融合,空三分层与融合稳定性仍是目前多源数据融合技术所面临的重要问题,这也是后续有待重点开展相关测试、研究、总结的方向。
参考文献
[1]任小强,温俊丽,孟勇飞,等.山区无人机倾斜摄影实景三维建模质量控制[J].工程勘察,2021(3):68-72.
[2]丁伟.倾斜摄影测量技术应用于农村不动产权籍调查[J].工程勘察,2020(12):58-62.
[3]鲁丽.倾斜摄影在旅游风景区三维建模的应用探讨[J].江西测绘,2020(2):19-21.
[4]李通.基于机载LiDAR技术的DEM快速更新关键技术研究[J].江西测绘,2019(4):20-22.
[5]廉福绵.LiDAR技术在高速公路改扩建中的应用及精度分析[J].江西测绘,2020(1):23-26.
[6]李晓斌,林志军,杨玺,等.基于激光扫描和倾斜摄影技术的三维实景融合建模研究[J].激光杂志,2021,42(8):167-170.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



