广东科技学院
摘要:随着汽车智能化技术的不断发展,自动驾驶功能已成为各大品牌汽车的亮点之一,在人们享受自动驾驶带来的便利时,安全性不容忽视。本文主要研究超声波测距在汽车自动驾驶过程中主动防撞可行性。设计了一款由STC89C52单片机为控制器,搭载超声波测距模块、蜂鸣器报警、LCD显示模块、按键模块的智能测距报警系统。在行车过程中,该系统对车子的前、左、右边车距进行监控,并实时反馈到LCD显示屏上,同时对车距进行安全性判定;当车距太小时,通过蜂鸣器提醒驾驶员采取安全措施,以达到降低出行风险的目的。通过Proteus进行仿真分析,实际搭建电路、调试,实践证明,既定的设计目标可以实现,能够在一定程度上降低出行风险,为出行增添一份保障。
关键词:超声波测距; 自动驾驶;距离检测;主动防撞
一 前言
随着汽车智能化技术的不断发展,自动驾驶功能已成为各大品牌汽车的亮点之一,甚至需要单独购买软件包才具有此功能。自动驾驶会如此引起大众关注,并为此买单,原因是:在以下场景中确实为人们提供了便利;
1 路途遥远的上班族,在上下班途中可以不时的放松双手、双脚、紧绷的神经,减轻疲劳感;
2 爱美女士的化妆时间大概半小时,可以利用汽车自动驾驶功能,边行驶边化妆,节省出宝贵的清晨半小时可以用来阅读、补充睡眠等;
3 司机在交通拥堵路段,不必紧盯前方是否可以通行,可以闭目养神,缓解烦躁的情绪;
在享受自动驾驶带来的便利时,有一点不容忽视,那就是安全性。研究表明:若在事故发生前1~2 秒内及时采取措施,可以有效降低发生事故的概率。因此,在行车过程中对自车周边环境进行探测,并主动进行报警或控制的汽车主动安全技术,对于自动驾驶有重要意义,是安全性保障的关键技术之一。
二 设计理论基础
声波是一种在固体、水、空气等物质中传播的机械波,但目前声波的频谱覆盖了一定的范围,如图2.1所示。 频率低于20HZ的声音称为次声波,正常人类能听到的最大频率约为20KHZ。频率大于20KHZ的机械波称为超声波。
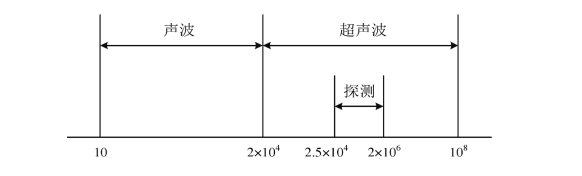
图2.1 声波频率示意图
超声波测距原理:声波在空气中的传播速度为340M/S是已知的,通过电平的变换使超声波发射模块电路发射8个超声波后启动计时,当声波从平面反射回来时,通过模块的接收电路判断是否有返回波信号,如果有就进行两级放大电路放大微弱的电流,MCU停止计时,MCU从开始计时到结束计时,定时器得到的数值即为声波所传播的时间,如图2.2所示。设
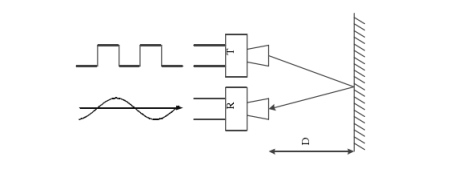
图2.2 超声波测距原理示意图
定时器得到的数值为 ![]() ,并且声波在空气中的传播速度为
,并且声波在空气中的传播速度为 ![]() ,则在
,则在 ![]() 时间内声波传播的距离为
时间内声波传播的距离为 ![]() :
:
![]() (2.1)
(2.1)
三 硬件设计及主要模块介绍
3.1 系统硬件设计框图
以STC89C52RC单片机为主控芯片构建超声波测距系统。 系统主要由主控制器、超声波模块、串口传输接口、复位电路、时钟振荡电路、液晶显示模块和报警提示模块组成。系统硬件设计框图如下图2.1所示:系统实时进行测量汽车前、左、右间距,当汽车间距小于设置的最小阈值的时候,系统进行通过蜂鸣器的蜂鸣声警醒驾驶员注意车距,以达到降低交通事故的发生的频率的目的,最大程度上保护驾驶员的生命和财产安全。
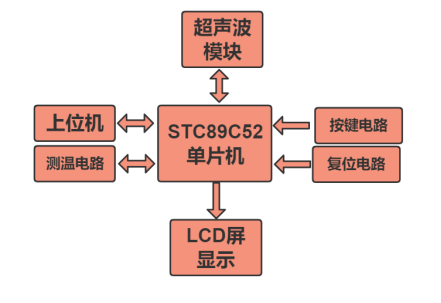
图3.1 系统硬件设计框图
3.2 主控制器模块简介
本系统主控芯片选用STC89C52单片机,该单片机是一款8位的控制芯片,该控制器的实物图3.2所示:它整个系统的核心和核心; 内核性能会影响系统性能、稳定性和性能。随着科技的发展,这一款由宏晶科技有限公司自主研发生产的芯片在现在依然在市场上有很大的占有量。此外还有性能更加优越的16位、32位单片机。
图3.2 STC89C52芯片实物图
3.3 超声波模块简介
高精度超声波传感器的型号为HC-SR04,最大3mm的测量距离精度,已经足够满足自动驾驶汽车的测距分辨率的要求,另外它体积小,集成度高,小小的体积集成了电气控制电路、超声波发射电路、回波信号接收电路、信号转换输出电路,如图3.3所示
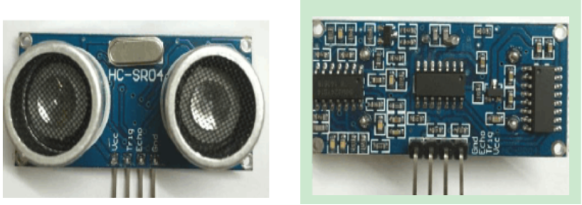
图3.3 超声波模块实物图
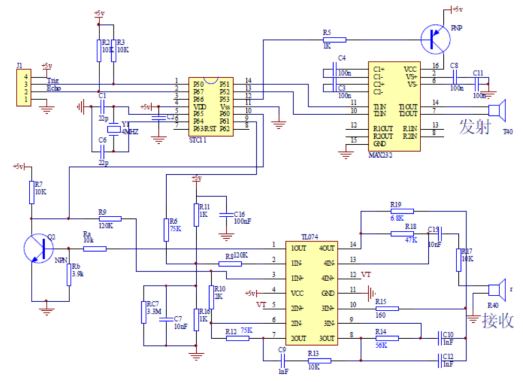
下图为超声波模块的电路原理图,在电路原理图的上半部分为超声波发射电路,下半部范围超声波接收电路,模块的接收端收到超声波是非常微弱的信号,TL074芯片将接收的信息转换成产生一个MV级别弱电压,而这种微弱电压在通过NPN三极管再次放大后成为了单片机可以处理的最大单脉冲信息。
图3.4超声波测距原理图
四 硬件软件设计
4.1主程序设计
整个系统的工作流程大致如图4.1所示,在车子启动的时候,系统也同步唤醒;在系统进程开始时,所有系统外设都被初始化。初始化完成后,定时器T0每隔100MS产生一次中断;在中断服务函数中启动测量距离函数同时开启定时器T1开始计时,等待接收回波信号。如果超过了40毫秒还没有收到回波信号,就判断为附近空旷,并跳出等待进入下一个检测周期;如果检测到回波信号,立即关闭定时器,计算T1定时器所记录的时间,再根据温度修正后的声速,计算方程演算出距离,显示器将每1秒实时更新显示,并通过串口将数据发送到上位计算机;拿到并与距离阈值进行比较,当小于阈值时,系统报警警醒驾驶员。
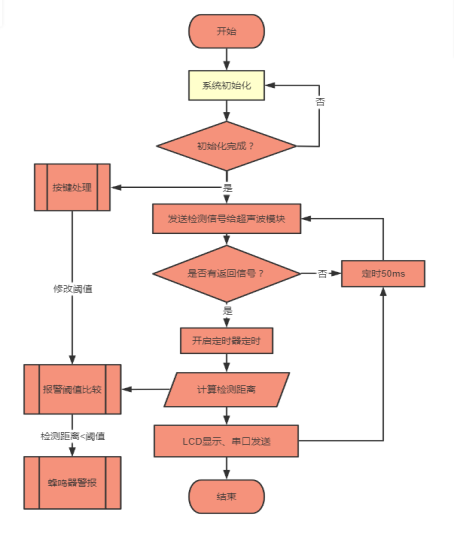
图4.1 系统程序流程图
4.2 超声波测距程序设计
本程序控制超声波模块,利用通用的GPIO管脚发送控制指令,实现模块的启动功能,读取超声波模块接收到的回波信号,根据相对应的距离计算公式计算到障碍物距离。 LCD1602 显示器提供实时数据。
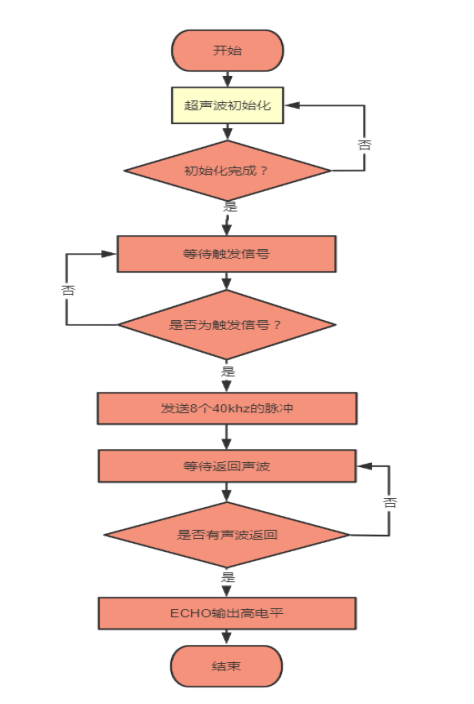
图4.2超声波程序流程图
五 调试结果
成品的最大测量距离达到180cm左右,实现了通过串口、LCD显示屏实时显示测量的距离数据,声光报警体制完善,并且可以按照自己的需求调整报警的阈值,报警阈值不能小于系统默认的报警阈值:25CM。
图5.1系统正常工作 |
图5.2系统右边报警 |
图5.3系统左边报警 |
图5.4系统待机 |
六 结论
以STC89C52微控制器为核心搭建的超声波测距系统,可以应用于汽车自动驾驶领域,在行车过程中,对车子的前、左、右边车距进行监控,并实时反馈到LCD显示屏上,同时对车距进行安全性判定;当车距太小时,通过蜂鸣器提醒驾驶员采取安全措施,以达到降低出行风险的目的。目前该系统只是简单的提醒驾驶员,用于实际环境时,可以考虑与辅助驾驶系统联立,全面提高出行安全系数。
参考文献
[1]刘芬, 罗前刚, 张远征. 高精度超声波测距方法的研究[J]. 自动化与仪表, 2021,36(05):66-69.
[2]邬文俊, 陈泽远, 马丹, 程斌, 王选择, 翟中生. 一种高精度解包络超声波测距方法[J]. 仪表技术与传感器, 2019(08):122-126.
[3]武斌, 王琦, 袁文囿, 赵如意, 王撰娉, 王进. 超声波倒车雷达系统设计[J]. 科技创新与生产力, 2017(12):110-113.
[4]杨扬. 超声波测距仪的研究与设计[J]. 电子测试, 2017(22):28+23.
[5]齐海东, 张超, 陈涛. 超声波传感信号的特性分析[J].电子测试,2017(22):120+119.
314739873@qq.com
挂靠项目:广东科技学院校级大创项目(超声波测距在自动驾驶领域的应用探究校2021006 )

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号







