(中国船舶集团公司第七一○研究所,湖北 宜昌 443003)
摘要:拖曳系统在海上工作运动时,在海况比较高、拖曳深度比较浅的情况下,母船的运动对其实际活动影响很大,因此需要对其进行研究。本文通过绞车和拖体之间增加了海况模拟器模拟定端的升沉运动,通过改变拖曳速度、拖曳缆长及拖体定深翼板面积的方式进行试验,对拖体姿态影响因素进行分析,为后续实际使用提供依据。
关键词:高海况;浅拖;拖体运动;仿真分析
1 前言
拖曳系统是一种日益广泛应用于海洋研究、海洋监测与军事等领域的水下探测装置,它在海洋环境与海洋资源调查以及国防建设中有着特殊的用途。母船在高海况环境下近水面拖曳航行时,会产生明显升沉和纵摇运动。而在浅水区域作业时,拖缆放缆长度较短,拖体定深度较小,拖曳系统垂直方向缓冲能力较弱。母船的受扰运动会经由拖缆直接作用于拖体,导致拖体随之起伏运动。当拖体运动幅度及变化率过大时,将导致作业效果下降而不满足系统作业需求。因此对拖曳系统在高海况影响下的姿态进行仿真分析,对拖曳系统的设计与使用是大有裨益的,可以节省大量的时间和资金,减少人力和物力的损失。
2 缆索数学模型
2.1 坐标系的建立
为了便于分析,建立了以下两个坐标系,如图1所示。
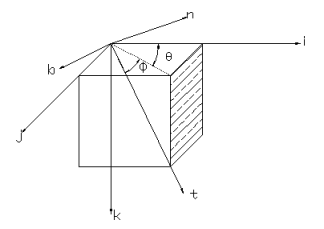
图1 坐标系示意图
一个是固定的惯性坐标系,单位矢量为![]() ,
,![]() 垂直向下,坐标系原点位于水面。缆索上任意一点P在此坐标系中的位置(x,y,z)表示为矢量:
垂直向下,坐标系原点位于水面。缆索上任意一点P在此坐标系中的位置(x,y,z)表示为矢量:
![]() 。
。
另一个是缆索局部坐标系,坐标原点在P点,各轴单位矢量为![]() 。
。![]() 与缆索相切,指向索长s增大方向即背离拖曳方向;
与缆索相切,指向索长s增大方向即背离拖曳方向;![]() 垂直于
垂直于![]() 切于
切于![]() 、
、![]() (
(![]() 为索段相对于海水的运动速度)共面;
为索段相对于海水的运动速度)共面;![]() 垂直于
垂直于![]() 、
、![]() ,两坐标系均为右手正交系,它们之间以欧拉角(θ、ψ、
,两坐标系均为右手正交系,它们之间以欧拉角(θ、ψ、![]() )相联系。
)相联系。
两坐标系之间存在如下变换关系:

式中:



上述方程的物理意义为:坐标系![]() 绕
绕![]() 轴转过θ角,将
轴转过θ角,将![]() 轴转至
轴转至![]() 、
、![]() 平面内,再绕新的
平面内,再绕新的![]() 轴转动90o,使
轴转动90o,使![]() 与
与![]() 重合,新产生的坐标系再绕
重合,新产生的坐标系再绕![]() 转过ψ角,使
转过ψ角,使![]() 、
、![]() 与
与![]() 、
、![]() 重合。
重合。
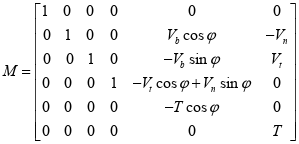
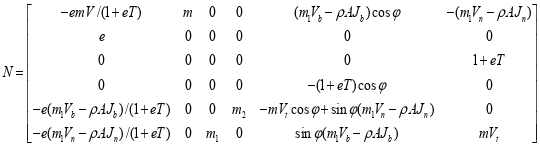
2.2缆体运动方程
缆体运动方程可以表示为
![]()
![]()
M,N,q的表达式如下

2.3 边界条件
2.3.1 缆体运动上边界条件
记母船垂向速度为VZ,同时,缆体系统作匀速直线运动,航速为VH,这样,收放缆运动的上边界条件即可表示为:![]() ,将此式在三个方向上展开,得到3个上边界条件。
,将此式在三个方向上展开,得到3个上边界条件。
2.3.2 缆体运动下边界条件
缆体运动下边界条件为:



3 仿真计算结果
将母船在高海况环境下的升沉和纵摇运动转化为拖缆定端的升沉运动作用于拖曳系统。假设拖缆定端在海况作用下呈现周期性余弦运动,取拖缆定端在海况作用下的升沉呈余弦运动Z=Asin(2πt/T)。分别对航速4kn、6kn、9kn,定端升沉运动幅值A为0.5m、1.0m,运动周期T为4s、8s,定深度为20m组合工况下的拖体拖曳过程进行数值模拟。将上述初始条件代入方程,结果如下:

(a)周期4s,幅值0.5m

(b)周期4s,幅值1.0m

(c)周期8s,幅值0.5m

(d)周期8s,幅值1.0m
图2 不同工况下拖体俯仰角随时间变化曲线
4 结论
由图2可知,各工况下拖体俯仰角随时间推移收敛于周期性变化,其变化周期与拖缆定端升沉周期一致。且随着航速的增加,俯仰角变化幅度明显降低。
拖体姿态变化过大的情况主要集中在低航速、短周期及大幅值的边界工况。因此,可通过提高航速、增大放缆长度(提高拖体后伸)、增大拖缆定端升沉运动周期、降低拖缆定端升沉运动幅值以改善拖体俯仰角。
若已知定端升沉运动幅值及运动周期,则可根据仿真计算结果通过线性插值对各航速下拖体俯仰角变化幅值及俯仰角变化率均值进行计算,用于拖体拖曳稳定性快速评估。
参考文献
[1] 张潞怡.深拖系统中缆运动的力学特性[J].上海交通大学学报,1997(11)
[2] 郑冲,刘忠乐.水下拖曳系统中缆索的动力学方程[J].海军工程大学学报,2000(5)
[3] 李英辉.拖曳系统计算中拖缆与拖体的耦合计算[J].海洋工程,2002(11)
[4] 朱克强, 郑道昌, 周江华, 等.拖船操纵运动与水下拖曳列阵的耦合运动分析[J].中国航海, 2005 (4)
[5] 李志印, 吴家鸣. 水下拖曳系统水动力特性的计算流体力学分析[J].中国造船,2007(6)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



