中国电子科技集团第二十研究所 710000
摘要:
在国防现代化的背景下,搜索雷达已成为当代战斗中不可或缺的一部分,精准监测到敌情对目标检测技术有了更高的要求,目标回波数据的处理显得尤为重要。精准地凝聚出原始回波点迹可为目标的提取节省大量时间,使得目标更容易被关联到,便于搜索雷达后续的TWS跟踪。
关键词:雷达;三维凝聚
引言:
本文针对现有的质心法求方位凝聚算法存在目标信息提取不完整,仅考虑了目标在方位上的分裂,忽视了目标俯仰面杂波和分裂产生的影响[1]。同时,在求质心法时没有设置对应回波幅度门限,容易导致计算结果浮动较大,存在较大的测量误差等问题,对现有算法进行优化,设计出灵活的凝聚准则。此外,本文充分利用了回波数据中的多普勒通道信息,对同一距离维度凝聚块的速度信息进行筛选,随后分别对目标距离维度、俯仰维度、方位维度依次凝聚,逐步处理原始回波数据,最终输出准确的点迹参数。
1、算法总体流程
本文综合考虑了目标在距离、俯仰和方位三个维度上的分裂影响,依次从距离维凝聚、俯仰维凝聚和方位维凝聚出发,对目标进行凝聚处理。其中,距离维凝聚主要是处理目标在同一俯仰、同一方位上不同距离单元的分裂影响;俯仰凝聚主要处理目标在同一方位不同俯仰上的分裂现象;方位凝聚主要处理目标在临近方位上的分裂现象,如图1为本文的凝聚总体流程。
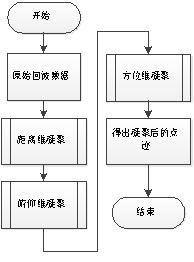
图1凝聚总体流程
本算法在进行原始回波处理时,先确立出原始回波的幅度门限值,对未过门限的点迹不做处理。同时根据搜索雷达的工作特性,设计出对应的最大的凝聚距离单元(NJMAXDIS)、最小凝聚距离单元(NJMINDIS)、最大的凝聚俯仰层数(NJMAXELE)、最小的俯仰凝聚层数(NJMINELE)、最大的凝聚方位个数(NJMAXAZ)、最小的方位凝聚个数(NJMINAZ)。
距离单元、俯仰单元和方位单元的凝聚公式如下。
距离单元凝聚公式:

俯仰单元凝聚公式:

方位单元凝聚公式:

上式中R表示距离,Ri表示第i个点迹的回波信号距离,Ai表示第i个点迹的回波信号幅度,el表示俯仰角度,eli表示第i个点迹的回波信号俯仰,Az表示方位角度,Azi表示第i个点迹的回波信号方位,n表示凝聚块中的处理点迹个数。
2、距离维凝聚
在距离维凝聚时首先确定出相应得连续距离单元的最大中断间隔阈值(DISINTERMAX)。确定出凝聚起始距离单元,以此距离单元为起始向后索引连续距离单元过门限点,并判断连续距离单元对应的多普勒速度是否满足同一目标的要求,若满足则归为同一凝聚块,在索引过程中当中断间隔大于DISINTERMAX时,使用距离单元凝聚公式计算出此凝聚块的质心,并将当前距离凝聚块的结果记录在DisResult[nEle][distanctD]结构体数组中。其中,nEle表示当前俯仰单元数,distanctD表示距离维凝聚计算出的当前凝聚块的距离单元质心值。如图2为距离维凝聚流程。
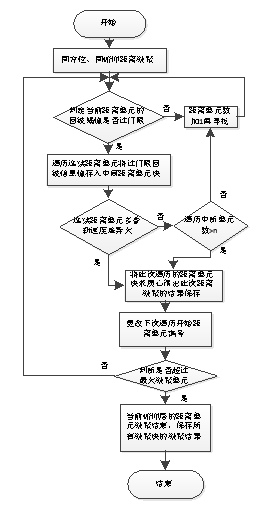
图2距离维凝聚流程
3、俯仰维凝聚
确定出俯仰凝聚时左距离连续单元最大中断间隔(ELELEFTINTERMAX)和右距离连续单元的最大中断间隔(ELERIGHTINTERMAX)。
(1)在进入俯仰维度凝聚时,判断当前距离维度凝聚结果中的俯仰单元nEle是否等于NJMAXELE,如果距离维凝聚结果中的nEle不满足俯仰最大,不进行俯仰维度凝聚。
(2)确定俯仰维凝聚准则。俯仰维凝聚是建立在距离维度凝聚结果的基础上,根据当前俯仰层数的不同使用不同的凝聚规则。当满足俯仰维凝聚条件时,即nEle等于NJMAXELE时,开始从俯仰的第一层向上索引,在索引过程中,当俯仰层数未达到顶层时,使用滑窗式在相邻两层同距离单元进行凝聚块的遍历,即在DisResult[i][j]、DisResult[i+1][j]继续寻找凝聚块,其中,i表示俯仰层数,j表示当前距离单元,此处凝聚块遍历时与距离维凝聚遍历不同,此处的索引中断间隔综合考虑了当前距离单元的前后点迹,前后点迹在本文中称为左右连续点迹,当索引中断间隔大于ELELEFTINTERMAX和大于ELERIGHTINTERMAX时,分别使用距离单元质心公式和俯仰单元质心公式求出此索引块的距离、俯仰质心,并将结果存于EleList结果体数组中,如图3为俯仰维凝聚流程。
4、方位维凝聚
确定出方位凝聚时左距离连续单元最大中断间隔(AZILEFTINTERMAX)和右距离连续单元的最大中断间隔(AZIRIGHTINTERMAX);(1)在俯仰维凝聚结束后,本算法进入方位维凝聚流程中,方位维凝聚依赖俯仰维凝聚的结果。首先确立出方位凝聚的起始方位,起始方位需满足该方位上的俯仰维凝聚全部结束,并将俯仰维的凝聚结果依次放入二维结构体数组PointGroupList,保证此数组不为空。
图3俯仰维凝聚流程
(2)确定方位凝聚准则。为确保凝聚后的点迹数据有效,在方位凝聚时需确立好起始遍历点迹,当起始遍历点迹位于俯仰的第一层时,此时的方位凝聚块由该点方位上向右三方位,俯仰上连续三层来组成;当起始遍历点迹位于俯仰的最后一层时,此时的方位凝聚块由该点方位上向右三方位,俯仰上向下连续三层的满足条件的遍历点组成;当起始遍历点介于第一层和最后一层中间时,此时方位凝聚块由该点在方位上向右遍历三方位,俯仰上以该层为中心,分别向上向下延续一层遍历来组成;在每个俯仰层上相邻距离单元的遍历方式与俯仰维凝聚时一致,在遍历点迹时,当寻找的点迹满足预设的幅度条件时将此点迹信息存入点迹块中,同时将此关联上的点迹从俯仰维凝聚结果中清楚,避免重复凝聚。如图4为方位维凝聚流程。
在经过方位凝聚后,会形成多个凝聚块,并且每个点迹块中包含多个点迹的方位、俯仰、距离信息,对每个点迹块分别求距离单元质心、方位单元质心、俯仰单元质心,即可输出凝聚后的点迹。

图4 方位维凝聚流程
现有的波束选大法仍存在忽视目标分裂,提取出目标点迹较于绝对,存在较大的提取误差[2]。此外,此方法还剔除了大量的分裂信息,部分弱小目标容易被忽视,对目标参数的提取比较片面等问题,本文通过将回波数据按照距离单元、俯仰单元和方位单元逐一量化,随后分别对距离单元、俯仰单元、方位单元依次凝聚,然后逐步处理原始回波数据,最终可输出准确的点迹参数。
5、总结
本文提出一种搜索雷达回波点迹凝聚处理方法,该算法综合考虑分裂目标和弱小目标的回波特性,首先在对原始回波数据处理时设定相对应的门限,然后,对过门限的数据采取质心法分别从距离单元、俯仰单元和方位单元上进行凝聚处理,从而实现既可避免弱小目标被滤掉,又考虑了目标的分裂现象。本算法可明显减小点迹在距离、方位和俯仰上的分裂,为后续的航迹处理提供了可靠点迹。并且本文所述的方法可以应用在搜索雷达数据处理软件上,并进行了多目标搜索试验,试验结果表明,本算法能准确区分出不同方位或距离上的邻近目标,同时,规避了同一个目标在距离或方位上形成多个观测点。将各种统计学的方法灵活运用在距离、方位、仰角的三维凝聚和参数测算中,提高了目标提取的真实可信度和点迹参数的精度,该方法已在现实产品中成功得以应用,充分证明了其在工程上的实用性。
参考文献
[1]孙晓龙,韩俊峰.一种基于三坐标相控阵雷达的点迹凝聚方法[J].现代导航,2020,11(06):442-445.
[2]周喃.一种基于三坐标雷达的点迹凝聚方法[J].雷达与对抗,2013,33(04):46-50.DOI:10.19341/j.cnki.issn.1009-0401.2013.04.013.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



