北京长城计量测试技术研究所 北京市 100095
摘要
微型应变在触觉传感领域广泛应用,软体机械手通过双轴微应变感知接触力,完成易碎品材料抓握控制,实现易碎待测样品自动上下料操作,可以取代人工过程简化校准人员操作程序。针对易碎品抓握问题,开展基于solidworks的应变式软体机械手结构设计与仿真,对设计结构合理简化,通过虚功原理建立拉格朗日动力学方程,基于simulink建立数学系统代入预期空间位姿得出仿真边界条件,基于workbench显示动力学开展多位姿动力分析,模拟软体手指抓握尖顶应力。结果表明检测接触力在30N载荷以下实现处于加速位姿状态时尖点握力使变形在4.12×10-4范围以内,符合易碎品材料上下料抓握需求。
0引言
随着技术发展,机器人介入社会作为灵活协作者完成复杂的、重复的或高难度的工作,集机械、电气、控制一体的机器人科学应运而生,近年来在诸多领域广泛应用,机械手技术有长足发展。加拿大Laval大学研制的单驱动源驱动15个关节自由度具有自适应功能的多指机械手[1];耶鲁大学的Dollar教授和哈佛大学的Howe教授利用快速原型技术设计制造的高欠驱动性灵活欠驱动自适应SDM机器人手[2];清华大学设计的MRF手[3]和PASA手[4-5]。
近几十年机器人触觉传感技术迅速发展,追求贴合人体结构的仿真机器人如人工皮肤,柔性机械手设计开始出现,如一种可无线控制的无束缚软机器人手[6]。基于银纳米线的可穿戴温度传感器[7]、用于机器人触觉皮肤的温度传感器[8]、可以检测弯曲方向和弯曲曲率具有断裂结构的石墨烯/聚氨酯海绵压力传感器[9]等的出现,也为机械手发展提供更多方向。2009年,日本冈山大学的Ogura等[10]研制了一种结构简单且变形大的“线虫执行器”,其利用正压和负压实现了像线虫一样在两个方向上的弯曲运动。2014年,Sun等[11]提出了一种新型蜂巢气动网络软体机器人。2018年,管瑞阳[12]等提出一种用于康复机械手的软体致动器设计,采用3D打印技术等制作具有菱形腔室与三角腔室的软体机械手并进行弯曲变形研究。
1结构设计
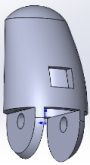
仿生机械手分成三段,下指段与掌骨关节连接,最宽处直径设计为12.7mm,指段总长度为33.655mm,中指段与指浅屈关节连接,总长度设计为29.21mm,最宽处直径设计为11.43mm,上指段与手指腱关节连接,总长度设计为,宽度由10.16mm最宽处向7.62mm指尖方向过渡。采用Solidworks建立结构模型,通过旋转实体和旋转切除建立轮廓,通过拉伸切除模拟关节旋转圆柱孔φ1.905mm,对称结构镜像成型。上指段先旋转180°实体半球模拟手指腱关节,再通过关节圆弧向指肚椭圆放样凸台,形成上下弯曲弧度不同的指腹曲线,起始处相切长度设为1.3,指尖由指肚椭圆向上做1.905mm的圆顶,最后通过拉伸切除与镜像形成关节旋转圆柱孔φ1.905mm,采用抽壳设计内部腔体结构。仿生机械手设计模型及结构简图如图1所示。

![]()


图1机械手模型
2动力学方程
机械手系统自由度由3*n-2PL-PH公式计算,其中关节为转动连接是3个低副,高副数量为0,故机械手系统是三自由度系统。根据拉格朗日方程建立三自由度机械手动力学模型,系统简化为三连杆结构。拉格朗日方程是运用虚位移原理将主动力与惯性力的虚功方程代入动力学普遍方程中得到的,其公式如下所示:
![]()
![]()
其中:
L——动势;
k——动能;
u——势能;
θ——关节变量,角度;
![]() ——关节角速度;
——关节角速度;
![]() ——关节驱动力矩。
——关节驱动力矩。
进一步推导可以得出:
![]()
对于平动刚体,将平移轴定理应用刚体动能中,推导出平动刚体动能公式为:
![]()
机械手关节间结构近似简化为理想状态均匀直杆,其质心位于中心位置,则根据平动刚体动能公式,各关节间结构动能如下:
![]()
![]()
![]()
其中:
![]() ——第i段的质量;
——第i段的质量;
![]() ——第i段的线速度(绝对速度);
——第i段的线速度(绝对速度);
![]() ——第i段相对自身质心的转动惯量;
——第i段相对自身质心的转动惯量;
![]() ——第i段关节角速度(相对速度),即
——第i段关节角速度(相对速度),即![]() ;
;
![]() ——第i段的关节角速度(相对速度);
——第i段的关节角速度(相对速度);
![]() ——第i段的长度。
——第i段的长度。
动能![]() 与
与![]() 中速度
中速度![]() 和
和![]() 都是绝对速度,可以根据牵连速度与相对速度合成求得,或者根据广义坐标方法求得:
都是绝对速度,可以根据牵连速度与相对速度合成求得,或者根据广义坐标方法求得:
![]()
![]()
其中:
![]() ——第i段质心位置横坐标(广义坐标系);
——第i段质心位置横坐标(广义坐标系);
![]() ——第i段质心位置纵坐标(广义坐标系);
——第i段质心位置纵坐标(广义坐标系);
其中![]() 和
和![]() 如下:
如下:
![]()
![]()
![]()
![]()
对其求导后,代入上述公式后得到动能![]() 与
与![]() 。整体系统动能为三连杆动能算术和。取初始位置
。整体系统动能为三连杆动能算术和。取初始位置![]() 为零势能点,计算连杆势能:
为零势能点,计算连杆势能:
![]()
根据拉格朗日方程建立动力学模型,对势能、动能求导,然后对角速度与角加速度求偏导并代入系统的动力学方程后,得到各指段关节扭矩与角度、角速度、角加速度关系式:
![]()
通过simulink建立动力学系统如图2所示,时钟控制变量信号时间,自定义输入函数调整状态、位姿、速度需求,矩阵运算结合总线系统实现微分、偏导数运算。

图2机械手位姿数学系统
选取预期位姿如表1所示,代入数学系统求解各姿态下机械手各关节动态扭矩响应。
表1 位姿选择(单位:rad)
组合方式 | 子步 | 手指位姿角 | 角速度 | 角加速度 | 作用时间 |
状态一 | 1 | θ1=u |
|
| 1s |
2 | θ2=0 |
|
| 1s | |
3 | θ3=0 |
|
| 1s | |
状态二 | 1 | θ1=u |
|
| 1s |
2 | θ2=u |
|
| 1s | |
3 | θ3=u |
|
| 1s | |
状态三 | 1 | θ1=u2/10 |
|
| 1s |
2 | θ2=u |
|
| 1s | |
3 | θ3=u |
|
| 1s |
3动力学仿真
根据模型设置材料为自定义超弹性材料,材料密度为1.15g/cm3,设置本构模型才来哦常数和不可压缩系数等参数,其应力-应变曲线如图3所示。经过计算弹性软体模型质量为m=kg。模型长度为l=43mm。设置被夹持材料易碎品,自定义porcelain材料,设置材料密度3.89g/cm3,陶瓷等熵割线热膨胀系数为1×10-6/K,杨氏模量为3.9×105MPa,泊松比为0.14。

图3材料动应力曲线
采用微型双向应变片测量指尖触摸压力,设计应变结构全桥供电方式双向贴片交角与位置。将数学系统解析结果作为边界条件输入动态模型,依据各状态调整参数,设置多子步离散点做近似拟合,状态一下指段角速度恒定,中指段、上指段受迫运动;状态二各指段角速度均恒定;状态三下指段角做匀加速运动,中指短、上指段速度恒定。指段作用于内部软体形成相对空间坐标系的广义力矩激励。预先,在前处理模块design modeler中应变片检测点插入测试曲线与仿真点位,采用协调修补适形法细化曲面与连接处网格划分如图9所示,固定待夹持陶瓷块,在显示动力学模块设置多子步回转载荷谱,仿真不同位姿下软体结构抓握瞬态尖端位移分布云图和动态应变曲线如图4所示。






图4各状态瞬态陶瓷位移分布与应变点应变曲线
由图可知,夹持力接触瞬间小速度匀速运动对易碎加快变形影响不大,而夹持力处于加速状态,赋予角加速度力矩时,仅仅施加0.2rad/s2微小加速度,瞬时可使陶瓷易碎品变形与微应变迅速加大,故而通过应变传感检测,在靠近被夹持物体前进行反馈减速是十分必要的。
4结论
结果表明,当回转关节靠近物体时处于加速状态,瞬时对易碎品产生动载荷影响,使易碎品陶瓷块应变迅速增大,故开展应变传感反馈减速是必要的。检测接触力在30N载荷以下实现处于加速位姿状态时尖点握力使变形在4.12×10-4范围以内,符合易碎品材料上下料抓握需求,30N接触力可作为检测反馈上限,响应时间在0.7ms以内。
5参考文献
[1] Nasser S, Rincon D, Rodriguez M. Design of an anthropomorphic underactuated hand prosthesis with passive-adaptive grasping capabilities [C]//Conf. on Recent Advances in Robotics: Vol.112. Florida, USA: IEEE, 2006: 25-26.
[2] Dollar A M, Howe R D. The SDM hand: a highly adaptive compliant grasper for unstructured environments [M]. Berlin, Heidelberg: Springer Berlin Heidelberg, 2009:3-11.
[3] Liu Q, Jing T, Mo A, et al. A novel robot hand with the magnetorheological fluid solidification [C]//IEEE Int. Conf. On Robotics and Biomimetics (ROBIO): Dec.6-9. Zhuhai, China: IEEE, 2015: 2495-2500.
[4] Liang D, Zhang W, Sun Z, et al. PASA finger: a novel parallel and self-adaption underactuated finger with pinching and enveloping grasp [C]//IEEE Int. Conf. on Robotics and Biomimetics (ROBIO): Dec.6-9. Zhuhai, China: IEEE, 2015: 1323-1328.
[5] Liang D, Zhang W. A novel parallel and self-adaption underactuated finger with link-wheel mechanism [C]//IEEE Int. Conf. on Advanced Robotics and Mechatronics (ICARM): Aug.18-20. Macao, China: IEEE, 2016: 518-523.
[6] Oh B, Park Y G, Jung H, et al. Untethered soft robotics with fully integrated wireless sensing and actuating systems for somatosensory and respiratory functions [J]. Soft Robotics, 2020, 7(5): 564-573.
[7]Cui Z, Poblete F R, Zhu Y. Tailoring the temperature coefficient of resistance of silver nanowire nanocomposites and their application as stretchable temperature sensors [J]. ACS applied materials & interfaces, 2019, 11(19): 17836-17842.
[8]Liu G, Tan Q, Kou H, et al. A flexible temperature sensor based on reduced graphene oxide for robot skin used in internet of things [J]. Sensors, 2018, 18(5): 1400.
[9]Yao H B, Ge J, Wang C F, et al. A flexible and highly pressure-sensitive graphene – polyurethane sponge based on fractured microstructure design [J].Advanced Materials, 2013, 25(46): 6692-6698.
[10]OGURA K, WAKIMOTO S, SUZUMORI K, et al. Micro pneumatic curling actuator-nematode actuator[C]// IEEE International Conference on Robotics and Biomimetics. New York: IEEE, 2009:462-467.
[11] SUN H, CHEN X P. Towards honeycomb pneunets robots[M]//Robot Intelligence Technology and Applications 2 Berlin.Germany: Springer, 2014:331-340.
[12]管瑞阳,王璐,魏伟,谢能刚.一种用于康复机械手的软体致动器设计[J].安徽工业大学学报(自然科学版),2018,35(04):348-351.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



