吴海洋
江苏省 徐州市 徐州中车轨道装备有限公司 邮编:221000
摘要:目的:探讨城市轨道交通车辆制动系统压力控制方法的智能化改进研究。方法:利用智能控制的原理对现有的控制方法进行改进与优化。在压力信号采集正常时,选择有效的学习样本,对电磁阀控制参数进行学习和记录;在压力信号采集异常时,根据学习所获得的控制参数,对电磁阀进行开环控制。结果:利用智能控制的原理对现有方法进行改进与优化。该方法在压力信号采集异常情况下不需要改装既有设备,而是通过开环控制实现接近正常情况下的压力控制,以保证车辆的制动力满足制动需求,从而提高车辆制动系统常用制动功能的可用性。结论:经试验台验证后结论如下:智能化改进后的压力控制方法不仅可以在压力信号采集异常时对压力进行开环控制,且具有与信号采集正常时相同的响应时间和良好的控制精度,可满足城市轨道交通车辆制动系统的运用要求。
关键词:城市轨道交通车辆;制动系统;压力控制;信号采集;智能控制
0绪论
城市轨道交通车辆空气制动系统是微机控制的直通式电空制动系统,压力控制是其核心功能。目前,通常由电子控制单元根据压力传感器的反馈值控制充气电磁阀或排气电磁阀动作,以实现压力闭环控制。如果因传感器故障、采集电路硬件故障等因素导致压力信号采集出现异常,无法实现压力的闭环控制,从而造成整列车的制动力不足,使列车限速运行甚至清客下线,进而影响线路的正常运营。
为此,本文提出了一种城市轨道交通车辆制动系统的制动压力控制方法,利用智能控制的原理对现有方法进行改进与优化,以保证车辆的制动力满足制动需求,从而提高车辆制动系统常用制动功能的可用性。
1车辆压力控制智能化的总体方案
1.1制动压力控制原理
城市轨道交通车辆空气制动系统的常用制动压力控制主要包括EBCU(电子制动控制单元)、充气电磁阀、排气电磁阀、中继阀、压力传感器、减压阀等部件,其控制原理如图1所示。EBCU根据常用制动指令等信息计算出需要施加的空气制动力目标值,并根据预控压力传感器采集到的反馈值控制充气电磁阀或排气电磁阀动作、输出预控压力,再经过中继阀输出与预控压力对应的制动缸压力。制动缸压力传感器通常用于状态监控。如果预控压力信号采集异常,可通过制动缸压力传感器进行冗余控制。如果预控压力和制动缸压力的信号采集同时出现故障,目前通常的故障导向方式是缓解本车的制动力。

注:中空箭头表示气路;实线箭头表示电路。
图1城市轨道交通车辆制动缸压力控制原理示意图
1.2压力控制智能化改进总体方案
压力控制逻辑由EBCU实现,通常的压力控制功能包括目标压力计算模块、压力检测模块和压力控制模块,智能化改进后增加了学习记录模块和异常控制模块,如图2所示。在压力信号采集正常时,学习记录模块对目标压力计算模块、压力检测模块和压力控制模块的参数进行同步的学习和记录;在压力信号采集异常时,异常控制模块调用学习记录模块存储的控制参数,通过压力控制模块,对充气电磁阀或排气电磁阀按照对应的控制策略进行开环控制。

注:实线箭头表示控制逻辑的输入/输出信号。
图2车辆制动系统压力控制方法智能化改进后的功能架构图
2压力信号采集正常时的学习过程分析
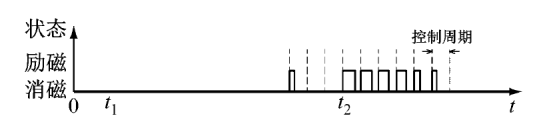
如图3所示,压力信号采集正常情况下,EBCU根据常用制动指令等信息计算出理论目标压力。同时,为了保证列车纵向冲击率满足要求,EBCU将计算出一个斜率控制目标压力,用于限制压力变化的速率。EBCU根据采集到的实际压力值控制充气电磁阀或排气电磁阀动作,按照斜率控制目标,将压力控制在理论目标压力误差范围内。

a)常用制动指令-时间曲线

b)制动缸压力-时间曲线

c)充气阀状态-时间曲线
d)排气阀状态-时间曲线
图3车辆制动系统正常压力控制过程示意图
此处主要通过PWM(脉宽调制)方式,即采用固定控制周期、控制电磁阀动作占空比的方式,来实现压力的精确控制。
因此,在压力信号采集正常情况下的学习过程,实际上就是在压力闭环控制过程中选择合适的样本,记录实际压力从初始压力到理论目标压力的全过程内充气电磁阀或排气电磁阀动作的一组PWM占空比数值。
2.1有效学习样本的选择
为了保证学习的正确性和有效性,避免因常用制动指令变化不规律、实际压力控制异常等因素引入的无效参数,需要对学习样本进行筛选。判定学习样本有效的条件有两个,分别为条件一(初始压力在当前理论目标压力误差范围内保持稳定的时间大于设定的门限值tTH)、条件二(在实际压力到达理论目标压力误差范围内的过程中,理论目标压力保持不变)。
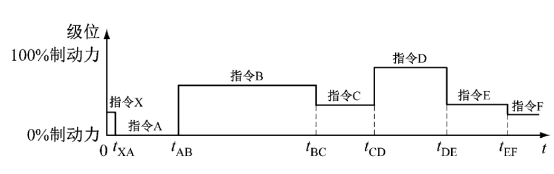
本文通过图4和表1的4个压力变化过程样例对学习样本的有效性进行说明。
a)常用制动指令-时间曲线

b)制动缸压力-时间曲线
注:tPH,B———指令B对应的实际压力在理论目标压力误差范围内的保持时间;tXA———指令X到指令A的变化时刻;tAB———指令A到指令B的变化时刻;tBC———
指令B到指令C的变化时刻;tCD———指令C到指令D的变化时刻;tDE———指令D到指令E的变化时刻;tEF———指令E到指令F的变化时刻。
图4正常压力控制过程的学习样本选择示意图
表1正常压力控制过程的学习样本有效性判断
压力变化过程 | 条件一 | 条件二 | 有效性 |
指令A→指令B | 符合 | 符合 | 有效 |
指令B→指令C | tPH,B<tTH,不符合 | 符合 | 无效 |
指令C→指令D | 符合 | 在实际压力达到理论目标压力误差范围内的过程中,理论目标压力有变化,不符合 | 无效 |
指令D→指令E | 初始压力不在当前理论目标压力误差范围,不符合 | 符合 | 无效 |
2.2压力信号采集正常时的学习过程
在城市轨道交通车辆每次制动和缓解的过程中,制动缸的初始压力和理论目标压力是随机的,压力的变化是连续的,但为了方便记录和处理数据、减少数据的运算量和存储量,需要将压力值进行离散化处理,按照等距原则划分为若干个压力区间,从而将所有可能的压力变化过程简化为从不同的初始压力区间到目标压力区间的若干个过程。
在压力信号采集正常时,对符合学习样本选择条件的过程进行学习,记录初始压力区间和目标压力区间,以及压力控制过程中每个控制周期内充气电磁阀或排气电磁阀动作的PWM占空比数值,用于压力信号采集异常时调用。
按照现有控制方法,压力信号采集正常时,在压力上升过程中,只有充气阀动作,排气阀只是在最后精确调压时有可能动作;同样地,在压力下降过程中,只有排气阀动作,充气阀只是在最后精确调压时有可能动作。因此,可以简化压力变化过程的学习记录及压力信号采集异常时的控制措施,在目标压力升高时只对充气阀动作进行学习,在目标压力降低时只对排气阀动作进行学习。这样,在压力信号采集异常的情况下,在目标压力升高时只控制充气阀动作,在目标压力降低时只控制排气阀动作。
3压力信号采集异常时的控制过程分析
3.1确定阀控参数的初始值和目标值
在压力信号采集异常的情况下,根据常用制动指令保持时间的长短,来计算阀控参数的初始值和目标值。然后根据所对应的初始压力区间和目标压力区间,调用正常情况下学习记录得到的阀控参数,对电磁阀进行控制,以达到开环控制压力的目的。设tH为常用制动指令保持时间,tV为虚拟压力变化时间(即按照压力控制斜率k可得出的虚拟压力达到理论目标压力的时间)。tV按照式(1)进行计算,其中:Pt,now为当前指令下的对应理论目标压力,Pt,pre为上次指令对应的理论目标压力,t0为虚拟压力空走时间。
![]() (1)
(1)
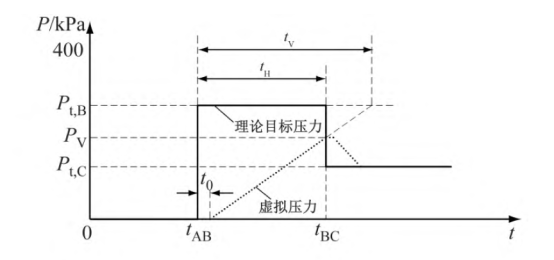
若tH≥tV,则分别选择指令变化前后所对应的理论目标压力作为阀控参数的初始值和目标值。如图5所示,常用制动指令B在虚拟压力达到所对应的理论目标压力后才开始改变,所以,选择由指令B到指令C这个过程的阀控参数时,将指令B对应的理论目标压力Pt,B作为初始值,将指令C对应的理论目标压力Pt,C作为目标值。

a)常用制动指令-时间曲线

b)制动缸压力-时间曲线
注:tAB———指令A到指令B的变化时刻;tBC———指令B到指令C的变化时刻。
图5 tH≥tV时阀控参数选择示意图
若tH<tV,则需要重新计算初始值。如图6所示,常用制动指令B在虚拟压力达到所对应的理论目标压力Pt,B之前就已经发生改变。
此时,选择由指令B到指令C这个过程的阀控参数时,将指令C对应的理论目标压力Pt,C作为目标值,将tBC时刻的虚拟压力PV作为初始值,PV按照式(2)进行计算。
![]() (2)
(2)
3.2设置参数的默认值
为了防止正常情况下程序对电磁阀控制的参数学习记录不完整,在程序初始化阶段会根据前期试验得到的有效数据,先对城市轨道交通车辆各种不同制动/缓解过程的电磁阀控制参数赋予一组默认值。
此外,在读取存储器中的阀控参数时,需对数据进行循环冗余校验。只有通过校验的数值才可以使用,否则将按照默认值进行控制,以增加控制方法的可靠性。

a)常用制动指令-时间曲线
b)制动缸压力-时间曲线
注:tAB———指令A到指令B的变化时刻;tBC———指令B到指令C的变化时刻。
图6 tH<tV时阀控参数选择示意图
3.3累积误差的修正
利用控制系统的特性来消除因开环控制引起的累积误差。当制动缓解后,EBCU控制排气电磁阀一直处于排气状态,此时即使压力信号异常,制动缸压力也能够保证为0,这样就消除了之前动作累积的误差,不会将误差累积到下一次制动缓解过程。
4试验验证
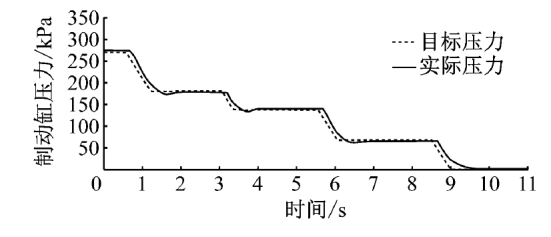
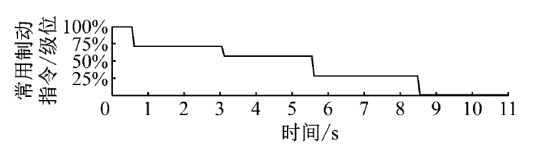
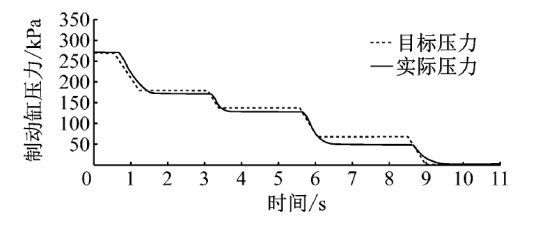
为了验证智能化改进后的压力控制方法,在城市轨道交通车辆制动控制系统试验台上对其进行了试验。在常用纯空气制动工况下,分别测试了压力信号采集正常和异常时车辆制动施加、制动缓解的压力变化情况。图7、图8分别为压力信号采集正常和异常情况下多级位常用制动施加过程的压力曲线。图9、图10分别为压力信号采集正常和异常情况下多级位常用制动缓解过程的压力曲线。
通过实测情况可以看出:
1)在压力信号采集正常情况下,EBCU能够根据压力反馈值,通过充气电磁阀或排气电磁阀精确地控制压力,其误差≤±5kPa;
在压力信号采集异常情况下,EBCU能够按照常用制动指令,根据正常情况下已学习记录的电磁阀控制参数对电磁阀进行开环控制,响应时间与正常情况下一致,并且控制精度较高。
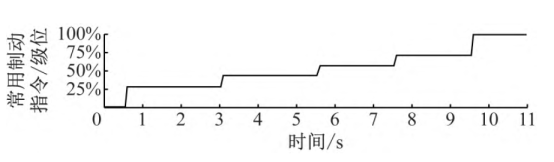
a)常用制动指令-时间曲线

b)制动缸压力-时间曲线
图7压力信号采集正常情况下常用制动施加压力曲线

a)常用制动指令-时间曲线

b)制动缸压力-时间曲线
图8压力信号采集异常情况下常用制动施加压力曲线

a)常用制动指令-时间曲线
b)制动缸压力-时间曲线
图9压力信号采集正常情况下常用制动缓解压力曲线
a)常用制动指令-时间曲线
b)制动缸压力-时间曲线
图10压力信号采集异常情况下常用制动缓解压力曲线
2)为了简化学习记录和压力信号采集异常时的控制复杂度,智能化改进后的压力控制方法在目标压力升高时只对充气阀动作进行学习和控制,在目标压力降低时只对排气阀动作进行学习和控制。所以在一次制动施加/缓解的过程中,常用制动指令第1次变化后产生的误差相对较小,约为±10kPa;随着常用制动指令变化次数增多,累积误差逐渐变大,到了常用制动指令第4次变化后,其误差约为±20kPa。
3)常用制动指令回零后,制动缸压力缓解到0,误差清零,不会将误差累积到下一次制动缓解的过程。
5结语
本文针对城市轨道交通车辆空气制动系统因压力信号采集异常导致无法实现压力控制的问题,利用智能控制的原理对现有的方法进行改进与优化,在压力信号采集正常时选择有效的学习样本,对电磁阀控制参数进行学习和记录;在压力信号采集异常的情况下根据学习所获得的控制参数,对电磁阀进行开环控制。
根据试验台实测的结果,在压力信号采集异常情况下,对现有方法改进后的压力控制方法能够按照常用制动指令对制动缸压力进行开环控制,实现接近正常情况下的压力控制,控制精度较高,可以满足城市轨道交通车辆制动系统的应用要求。此外,车辆在制动缓解后,误差清零,不会将误差累积到下一次制动缓解的过程。改进后的压力控制方法能够保证城市轨道交通车辆在压力信号异常情况下的制动需求,提高制动系统的可用性。
参考文献
[1]孙全涛,崔晓军,杜振振,赵欣,张乾乾,秦培斌. 城市轨道交通车辆制动系统的车地无线通信数据传输各环节常见问题分析及解决方法[J]. 城市轨道交通研究,2022,25(08):162-165.
[2]吴英帅,李惠,王鹤. 城市轨道交通车辆制动系统的零速信号和非零速信号方案选用及安全性分析[J]. 城市轨道交通研究,2021,24(12):89-92.
[3]马晓毅,李睿哲,杨思晨,项林轩,郭贤民. 城市轨道交通车辆制动系统故障检修研究[J]. 运输经理世界,2021,(12):34-36.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



