大连科技学院
1.背景
 城市基础设施是其正常运行和健康发展的物质基础,维护管道系统的健康是保障城市运转的重要条件。排污管内污物长期累积是排水管道堵塞的最重要因素,致使排水管道的排水、排污能力大幅降低。现在管道清淤对管道的伤害将破环管材原有的表面结构,形成疏松多孔的不稳定结构,引发诸如“红水”“黄水”等水污染事故。在管道清淤过程中使用的化学溶剂会引起管道寿命下降和其他问题。
城市基础设施是其正常运行和健康发展的物质基础,维护管道系统的健康是保障城市运转的重要条件。排污管内污物长期累积是排水管道堵塞的最重要因素,致使排水管道的排水、排污能力大幅降低。现在管道清淤对管道的伤害将破环管材原有的表面结构,形成疏松多孔的不稳定结构,引发诸如“红水”“黄水”等水污染事故。在管道清淤过程中使用的化学溶剂会引起管道寿命下降和其他问题。
我们的设计旨在高效的解决该类问题,我们提出了一个设想关于一个可以进入管道内部的无人机器人进行清淤在保护管道寿命和质量的前提下进行工作。
2.工作原理
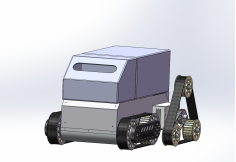
在车体内部两侧内置了两个可以提供足够动力的防水马达,由齿轮作为输出动力的装置,并驱动履带带动车体前进采用摇臂机构进行简单的越障行为,以摇臂带动外侧履带翻转提供高通过性。其中转向功能是依靠两侧履带的差速运转从而进行转向,调节平衡的一系列操作由探测系统配合控制系统进行,其使用的弹簧悬挂系统,使其能够更好的调节自身姿态,保护仪器。
通过头部的不同探测模块可以做到搜索环境,判断行进路径等的许多用途。通过头部的高清摄像头配合无线传输模块进行实时的信息回传,保证了安全性。
以往多数机器人的开发策略都在单一操作环境的基础上构建其结构和行为,这使机器人只能在单一环境中表现出色,但却影响了它们适应其他环境的能力。履带式行走机构可以在多种环境内自由行进包括但不限于,海滩,密林,沙滩,沼泽等。履带式行走机构的高通过性可以克服大量的障碍。
 2.1行走机构
2.1行走机构
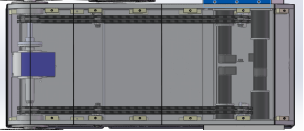
2.1.1减震机构
我们在行走机构上应用了成熟的板簧减震系统,这种系统的优点是其技术成熟,可以用更低的成本得到更加优秀的通过性,使其性价比更高。钢板弹簧悬架具有以下特点:较好的减震效果,钢板弹簧的悬架能够有效地吸收路面冲击和振动,减少机器人的震动和颠簸,提高行进稳定效果。钢板弹簧由于使用材料的原因,其寿命相对较长,具有较好的耐久性和回弹性。价格相对较低:相对于空气悬架和独立悬架等高级悬架系统,钢板弹簧悬架具有价格较低的优势。制造工艺相对简单:钢板弹簧悬架的制造工艺相对简单,易于维修和更换部件。
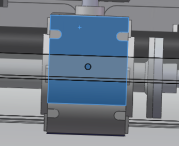
2.1.2动力系统
动力源采用了高功率的防水电动马达使其可以输出更高的扭矩,增强其通过性。这样在我们的机器人通过一些复杂地形时不会因为动力问题停摆和受困,在一些潮湿或涉水环境下可以保持正常工作。我们内置的蓄电池组保证了续航能力,使其可以在极端环境下长时间工作,满足一些情况下的特殊工时需求,提高适用性。
2.1.3履带样式
 经过我们的实际测试,在同等工作条件下我们选用的橡胶梯形履带比金属制的和其他形制样式的履带有更加优秀的通过性。可以有效支承主机重量,具有前进、后退转弯行走之功能,具有高通过性能。利用折弯加工,结构强度、刚度大。支重轮、导向轮采用深沟球轴承,一次性加黄油润滑,免于使用中维护和保养加油。轴端双密封结构,保证润滑油密封不外漏,并能防止泥水进入轮腔。
经过我们的实际测试,在同等工作条件下我们选用的橡胶梯形履带比金属制的和其他形制样式的履带有更加优秀的通过性。可以有效支承主机重量,具有前进、后退转弯行走之功能,具有高通过性能。利用折弯加工,结构强度、刚度大。支重轮、导向轮采用深沟球轴承,一次性加黄油润滑,免于使用中维护和保养加油。轴端双密封结构,保证润滑油密封不外漏,并能防止泥水进入轮腔。
2.2越障机构
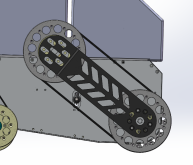
2.2.1摇臂机构
摇臂式前减震结构比传统独立弹簧减震结构更轻,质量可靠、运行稳定,可保证长时间正常运作。检修方便,没有太多冗杂的步骤,提高了车辆的纵向和横向操纵性能,摇臂式结构能够在越障时维持履带与路面的接触,增强了机器人的越障能力和稳定性摇臂式越障结构更省力,减少了越障过程中的抖动增强稳定性,不易侧翻,摇臂式结构增加了机器人的宽度,提供了更多的接地面积可以有效降低对地面的压强不易陷入一些类沼泽路面。
2.2.2清污系统:
叶片部分:使用的是两片相对放置的全刃口弧形刀片,利用放置在刀片后方的两部活塞杆控制叶片张开的角度和相对竖直的角度,使其可以符合多种不同的管道直径,进行清理作业,增加了其对不同管道的通用性。
动力部分:使用的是单独供能的有充足动能的电动机来给叶片提供动力,继而使其可以切削坚硬的污垢和物块。其动力总成安装在机器人的尾部,电机与叶片中使用齿轮箱进行链接防止直接的动力传输损害电机。
2.3操纵系统
 2.3.1我们的操纵系统和图传系统包括了前端视频采集模块、录像存储模块、5G 传输设备共计3个主要组成部分。其中,5G系统主要应用在人工移动巡检作业中,所有各类设备均需要采用统一的接入形式,准确连接到后端网络视频以集中监控平台中的通用接口,为设备通用性提供保障,并保证任视频的有序分布便于查阅。在任一PC设备上运行时,能够查看任意前端设备传递回来的视频图像信息,同时还能够远程控制设备运行,并在第一时间准确传输操作员对机器人的控制命令,确保控制命令的及时性。
2.3.1我们的操纵系统和图传系统包括了前端视频采集模块、录像存储模块、5G 传输设备共计3个主要组成部分。其中,5G系统主要应用在人工移动巡检作业中,所有各类设备均需要采用统一的接入形式,准确连接到后端网络视频以集中监控平台中的通用接口,为设备通用性提供保障,并保证任视频的有序分布便于查阅。在任一PC设备上运行时,能够查看任意前端设备传递回来的视频图像信息,同时还能够远程控制设备运行,并在第一时间准确传输操作员对机器人的控制命令,确保控制命令的及时性。
2.3.2红外系统;可见光照明系统虽然能够提供一定的照明,但在管道内等能见度低的环境下夜间视距不远。 虽然可以增加相当数量的灯光来改善,但会影响机器人总体的功耗,使机器人的可使用距离减小,而红外夜视成像技术能够观察到比普通大灯远 3 倍至 5 倍的距离。
3.创新点和应用领域
我们根据已有的现行机械结构进行重组和优化,设计和创造满足生活和生产需求的新产品。有以下的几大创新点:
1.安全可靠 安全可靠始终是一切产品的首要原则。对于机械产品而言,零件的机械强度、刚度、热平衡性、稳定性和耐磨性都需要满足要求。在设计上要保证科学合理,材料选取要正确,加工工艺和装配都需要满足安全可靠的原则。
2.经济效益:作为一款机械产品,目的还是要为企业带来更多的利润,所以经济效益是我们不得不考虑的问题。机械产品既要满足客户的要求,还有尽可能成本低廉。为了达到经济最佳性,产品的设计和制造都该考虑在内。
在本项目中,其关键的核心主要是对机械产品的创造模式、机理、方法进行探索,并对机械产品的创新设计进行定量化和程式化。扬长避短对于机器人预想的工作环境进行调整,从经济性,工作效率,维护和寿命等多方面进行权衡,最终形成了该方案。
2023年大学生创新创业训练计划《水路两栖机器人》

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



