山东协和学院工学院 济南 250107
摘 要:如今,我国正处于经济迅猛发展的时期,人民的生活水平得到普遍提高,居住环境和生活环境也不断的改善,但同时,我国的消防安全隐患仍是个巨大的问题。每年,我国的火灾事故频频出现,尤其是发生了重大火灾时,消防工作人员自身在抢救时也面临着生命的危险,甚至有时候根本无法达到目的地进行灭火抢救。如何能在高效灭火的同时保障消防员的生命安全,是我们当今所考虑的问题,于是,当代人们想出了智能灭火小车,由机器代替人们进行一些不可完成的工作,同时也能减少生命和财产的损失。
关键词:智能灭火小车;MX1508;STC89C52
引言
基于单片机的智能灭火小车设计的研究背景,源于对火灾扑救效率和安全性的需求和对智能科技的追求。通过单片机技术的应用,可以实现智能灭火小车的自主导航、实时感知、智能控制等功能,提高灭火效率和消防安全,同时也为智能科技的发展提供了基础和支撑。本次设计的研究旨在设计一个基于单片机的智能灭火小车,能够实现火源的检测并且自动寻迹前往进行灭火。并结合了蓝牙模块,可以实时向手机反馈小车的运转状况,也可以通过手机发送指令控制小车的运行。
1系统硬件介绍
1.1单片机最小系统
STC89C52单片机最小系统电路是一种基于STC89C52单片机的基本电路,包括STC89C52芯片、11.0592MHz晶振和复位电路。晶振提供时钟信号,复位电路用于初始化单片机,为其提供稳定的工作环境,实现基本的操作和程序运行。这个最小系统电路是STC89C52单片机开发和应用的基础。
1.2避障检测模块电路
HC-SR04超声波检测模块是一种常用的超声波测距模块,包含超声波发射器和接收器。它通过发射超声波脉冲并接收其回波来测量物体与模块之间的距离。模块工作原理是通过发送一个短脉冲的超声波信号,然后计算从发射到接收回波的时间差来确定距离。HC-SR04模块广泛应用于无人机、机器人、智能小车等领域,提供非接触式、精确的距离测量功能。
HC-SR04超声波检测模块实物图如图1所示

图1 超声波检测模块实物图
1.3红外循迹模块电路
TCRT5000红外传感器是一种常见的红外线接收器模块,具有发射与接收功能。它由红外发射二极管和光敏二极管组成,用于检测物体是否存在或通过红外光的反射来测量距离[10]。当红外光遇到物体并反射回传感器时,接收器将接收到的光信号转换为电信号,以便进行进一步的处理。TCRT5000红外传感器广泛应用于避障、测距、物体检测和线路跟踪等项目中,是一种便捷而实用的传感器模块。
以上是对红外循迹模块的原理进行了说明,具体的模块实物图与接线图如图2与3所示。

图2 TCR500红外循迹模块实物图

图3 TCR500红外循迹模块接线图
1.4测速模块电路
测速模块是利用红外对射管传感器对此次设计的速度进行实时采集,然后发送给中央控制模块处理后,发送到显示模块显示。测速原理为,当被检测的物体经过红外对射管传感器时,传感器会感受到光照的变化。根据编码盘上黑白相间的区域,光照的变化会引起光电传感器输出电信号的变化。通过测量输出信号的频率或脉冲数量,可以计算物体的转速或运动状态。测速模块实物图与接线图如图6与7。
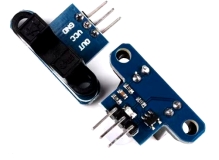
图6 测速模块实物图

图7 测速模块原理图
1.5火焰检测模块
火焰传感器是使用AC4067红外敏感型芯片对红外强度进行检测。火焰传感器模块是一种用于家庭环境火焰监控的装置。当物体燃烧时,会产生火焰,而火焰的热辐射会生成具有一定波长的红外光。这些红外光的波长通常在750~2500nm范围之间,红外光具有较强的穿透能力,相对于可见光来说,其波长较长,不容易被吸收[12]。火焰检测模块实物图与接线图如图8与9所示。
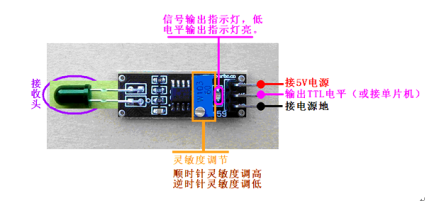
图8 火焰检测模块实物图

图9 火焰检测模块接线图
1.6蜂鸣器报警模块
本次设计中使用蜂鸣器模块作为报警进行设计,蜂鸣器报警模块是一种常见的声音输出设备,常用于各种电子设备和系统中作为警报或提示音的发声装置。它通常由振膜、震荡电路和驱动电路组成[14]。
蜂鸣器的工作原理基于电磁感应和振动。当电流通过蜂鸣器的驱动电路时,电流会产生磁场,这个磁场将与蜂鸣器内部的振膜相互作用。振膜是一个薄膜,它由柔软的材料制成,可以随着电流的变化而振动。
在工作时,驱动电路会以一定频率产生电流,并通过电磁感应作用将振动传递给振膜。振膜的振动会产生声波,从而产生可听到的声音。蜂鸣器的声音频率取决于驱动电路产生的频率和振膜的振动特性。
蜂鸣器模块实物图与接线图如图12与13所示。
 .
.
图12 蜂鸣器报警模块实物图

图13 蜂鸣器报警模块接线图
1.7蓝牙模块
此次设计采用ECB02作为此次设计的检测和控制系统,用户可以通过蓝牙连接手机然后远程查看有关数据,并可以远程控制。
ECB02蓝牙模块采用了蓝牙技术标准,通常基于蓝牙2.1或更高版本的规范。它具有低功耗、高速传输和广泛的通信范围等特点,可用于各种应用领域,如无线数据传输、远程控制、传感器网络和物联网等。
蓝牙模块通常包括蓝牙芯片和相关的外围电路。ECB02蓝牙模块具有一定的处理能力和存储容量,可以支持蓝牙协议栈的运行,并提供与其他设备进行通信所需的接口和功能。在与单片机进行通信时,首先需要将蓝牙模块与单片机的UART接口进行连接。通常,蓝牙模块具有TX(发送)和RX(接收)引脚,而单片机也有相应的TX和RX引脚[15]。蓝牙模块实物图与接线图分别如图14与15所示。

图14 蓝牙模块实物图

图15 蓝牙模块接线图
仿真及实验结果分析
2.1仿真
整体仿真电路图如图16所示,主要包括STC89C52单片机、超声波模块、电机驱动模块、一个继电器(用于控制灭火)、蓝牙模块、测速模块、声光报警电路。

图16仿真系统图
2.2实验结果分析
小车在正常行驶的过程中,通过一对红外寻迹管进行寻迹。如果是实物进行测试,是将小车放置于绘制好黑线轨迹的跑道中,如果黑线在中间,小车正常前进,如果黑线在小车左侧,左侧红外对管感应到黑线,此时小车左电机反转,右电机正转,从而实现小车左转,反之小车右转。从而在动态调节中使得灭火小车可以寻迹。通过一对红外寻迹管进行寻迹,在寻迹过程中,通过超声波检测前方障碍物,当检测到障碍物距离小于50cm大于30cm,蜂鸣器报警当检测到障碍物距离小于等于30cm时,自动停车,直到障碍物移除。通过火焰传感器检测是否发生火灾,发生火灾后,停车,闭合继电器进行灭火,直到火被熄灭,再继续前进。系统通过蓝牙模块实时向手机传输小车状态信息,也可以通过蓝牙发送指令控制小车运行。
总结
本文介绍了一个基于STC89C52单片机的智能灭火小车设计。该设计利用单
片机作为灭火系统的控制中心,火焰传感器用于检测火源,小车通过直流减速电机驱动行驶。电机驱动电路采用MX1508芯片,控制小车的移动。系统的主要功能是从安全区出发,在指定路线上行驶,一旦火焰传感器检测到火源,系统会启动水泵进行灭火。
参考文献
[1]张建国.单片机在电气工程自动化控制中的应用[J].造纸装备及材料,2021,50(05):22-23+37.
[2]冯乔.单片机技术在智能小车避障循迹系统设计中的应用[J].现代信息科技,2020,4(08):56-57
[3]李瑞,刘琦,袁文正,潘强辉,戴慎超,陶卫军.新型智能消防灭火机器人设计及实现[J].南京理工大学学报,2022,46(05):553-560.
项目:2023届毕业设计

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



