陕西中烟工业有限责任公司宝鸡卷烟厂
摘要
在现代工业自动化生产中,视觉控制技术主要专注于集合机械,光学,电子,软件系统,它是为了检测缺陷和提高质量,操作效率,并保障产品和过程安全。为积极响应行业物流“精益高效、协调共享、绿色循环”工作要求,简化版循环烟箱(以下简称:简化烟箱)在宝鸡卷烟厂到2021年投入使用,随着使用数量的增加,同时产生混牌风险的增加。由于其外形、标识完全一致且一维码外观类似,在分拣过程中容易产生混牌,针对上述问题,自主设计研制“立体库分拣线简化烟箱混牌纠错视觉预警系统”。实现了分拣过程的简化烟箱码的快速识别与纠错,能显著提高物流出库的准确率,助力烟草物流不断提质增效。
关键词 视觉系统 工业相机 纠错预警
一、 视觉系统控制原理
机器视觉是研究用计算机来模拟生物宏观视觉功能的科学和技术。首先采用CCD照相机将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,根据预设的容许度和其他条件输出结果。它是综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。
二、视觉系统应用范围
目前,机器视觉的应用普及主要体现在半导体及电子行业,其中大概40%-50%都集中在半导体行业。另外机器视觉系统还在质量检测的各个方面也已经得到了广泛的应用。随着配套基础建设的完善,技术、资金的积累,各行各业对采用图像和机器视觉技术的工业自动化、智能化需求开始广泛出现。主要集中在生产流水线,例如汽车零配件尺寸检查和自动装配的完整性检查,产品包装上的条码和字符识别等。
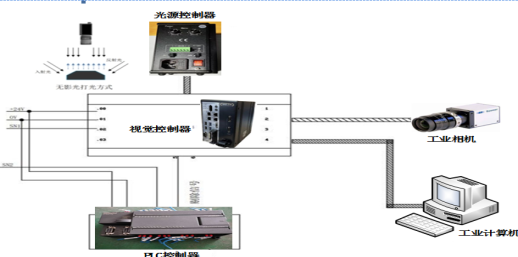
三、视觉控制系统组成视觉系统组成主要包括:
光源、镜头(定焦镜头、变倍镜头、远心镜头、显微镜头)、 工业摄像机(包括CCD相机和COMS相机)、光源控制器、视觉控制器即包含图像处理单元(或图像捕获卡)、图像处理软件及通讯 / 输入输出单元等。每个元器件的选型主要依据工作现场实际情况进行确定。
四、视觉控制系统在物流分拣线上的的应用 主要通主要元器件的选型、程序开发及视觉控制技术的应用,在分拣线上实现简化烟箱混牌识别风险,保障产品质量,维护企业形象。
(一)主要元器件的选型
1、工业摄像机选型方案
机器视觉系统由图像采集、图像处理以及信息综合分析处理三个模块构成。而工业摄像机则是机器视觉系统当中图像采集模块的核心部件,对于机器视觉系统选型来说是至关重要的。因此摄像机选型要考虑主要参数如下:
a)确定摄像机传感器类型:根据检测对象的特点,采集图像时选用合适的摄像机。
①确定摄像机扫描方式:根据不同需求,选用合适摄像机。对固定视野大的件烟品规检测,需选用面阵摄像机;对件烟的一维一维码识别,可选用线阵摄像机。
②确定摄像机传感器结构特性:CMOS读取速度比CCD更快、功耗更低,因此选用CMOS传感器的摄像机。
b)确定分辨率
分辨率是工业摄像机最关键的参数之一,主要用于描述摄像机对被摄物的分辨能力。件烟烟箱长宽M×N=569mm×245mm。根据现场情况,设计视场范围(对焦平面矩形大小)为L×H=800mm×600mm,为了获取清晰的一维码图像,单像素精度t≤0.5mm,因此所需摄像机最小分辨率为(L/t)×(H/t)=1600×1200=192万pixel。
2、镜头选型方案
镜头作为系统关键光学器件,其品质好坏直接影响成像质量,对于定位、缺陷检测等应用,起到决定性作用。
a)确定镜头焦距
确定镜头焦距:将摄像机架设到固定位置,因此选择镜头到图像平面的距离具有固定视场角(AFOV)的,即固定焦距镜头。

图上为视觉视同近似模型,WD为被观测物体(对焦平面)到镜头前端的距离,则![]() ,件烟与镜头距离(即WD)为550mm,镜头视场高度已设定为600mm,可计算得到摄像机AFOV=2*tan-l(300/2*550)=30.5°。结合已选定的图像传感器的水平尺寸h,确定所需镜头的焦距
,件烟与镜头距离(即WD)为550mm,镜头视场高度已设定为600mm,可计算得到摄像机AFOV=2*tan-l(300/2*550)=30.5°。结合已选定的图像传感器的水平尺寸h,确定所需镜头的焦距![]() 。
。
3、光源选型
图像质量的高低还取决于合适的照明方式,因此光源是机器视觉系统中不可忽略的一个重要组件。针对不同的检测内容,不同的检测物体,需要选用不同的光源和不同的打光方式来达到最佳的检测效果。
a)光源种类选择
常见的光源种类主要有:LED灯、卤素灯、荧光灯、白炽灯等。
LED光源相比于其他光源在能效和寿命上有较大优势,具有多色选择、响应速度快、可触发等优点。因此选择LED光源进行照明。根据检测应用:定位、件烟品牌的一维码检测和文字检测、件烟规格的尺寸测量的需求,弱化表面纹理,使得图像上整体均匀,因此选择多角度照射的无影光打光方式。
4、视觉控制器选型
视觉系统由一个或多个用于图像采集的摄像机以及一个用于运行采集和分析软件的控制器组成。在智能摄像机系统中,摄像机和控制器集成到一个装置中,摄像机通过帧接收器或以太网、USB等其他连接端口连接到台式计算机或工业PC,甚至摄像机可直接连接到可编程逻辑控制器(PLC)等工业控制设备,由控制器管理图像采集以及I/O和测量设备。
通过以上分析,分拣线纠错预警系统主要选择元器件型号为: FZ-SC的工业摄像机(包含摄像机、镜头、电缆等)、光源控制器(包含条形光源)型号为FLV-ATC41024-O、视觉控制器的型号为OMRONFH-L550。结合通用部件进行电路图的设计如下:
(二)、简化烟箱码识别程序设计
主要包括三部分的检测识别程序:分别是烟箱码品牌文字的定位与识别、烟箱一维码的定位与识别、烟箱码数字信息识别。
1、烟箱码品牌文字的定位与识别
主要包括文字区域的定位和识别两部分。文字区域定位方法:包括图像校正、文字区域检测和文字区域透视变换三个阶段。文字识别方法:文字图像首先经过空间变换网络修正图像的形变与位移,使其更加规整。然后通过特征变换网络,提取其视觉特征。之后通过语义推理网络,融合视觉与语义特征。
2、烟箱一维码的定位与识别
主要包括一维码区域的定位和识别两部分。首先对采集的件烟图像进行预处理后,将一维码区域分割出来,对其定位及倾角计算,经几何校正后给出一维码定位区域。然后针对该区域,采用YOLOV4检测框架对其识别,最终得到一维码的识别结果。
3、烟箱码数字信息识别
主要包括数字区域的定位和识别两部分。数字信息区域定位方法:包括图像校正、数字信息区域检测和数字信息区域透视变换三个阶段。为了确保所有的烟箱码数字信息方向一致呈水平方向,当系统识别获得烟箱码上的信息不完整,或信息(文字、一维码、数字)不一致,或与WCS系统当前任务品规不同时,烟箱码混牌识别预警系统可通过系统中的PLC发送信号或控制当前分拣线的电机停止运行。
(三)、视觉控制系统在物流分拣上的应用效果
通过半年的上机应用后,从实际生产现场反馈信息显示,效果主要表现在:
1、半年验证期内,混牌从各出入库出库现场、抽检过程中,未发现一次混牌现象,使产品质量得到保障,维护企业形象;
2、混牌情况的不在发生,节约损坏件烟及备件的消耗 ,实现了降本增效;
3、提高了设备的运行作业率,降低了间接的能源消耗。
结束语
在分拣线实现了简化烟箱纠错预警的实例证明,视觉控制技术在物流分拣上的应用取得实际效果,同时也可把这项技术应用在卷烟小盒、条包、封箱等环节,与实际的生产现场加以尝试改进,将会助推产品质量过程检测更加完善,实现质量强企的战略目标。
参考文献
1. [德]卡斯特恩·斯蒂格(Carsten Steger), 马克乌斯·乌尔里克(Markus Ulrich),克里斯琴·威德曼(Christian Wiedemann).机器视觉算法与应用. 清华大学出版社.2019.07.01.
2.韩九强.机器视觉技术与应用.高等教育出版社,2009.12.1
3.余文勇、石绘.机器视觉自动检测技术.化学工业出版社.2013.10.1
4.王莉娜.机械视觉检测技术及应用.机械工业版社.2023.02.02
作者简介 :张靖,男,1973.2.20,汉族,陕西岐山人,陕西中烟工业有限责任公司宝鸡卷烟厂,工程师,电工高级技师。长期从事物流设备维修及维护工作。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



