牡丹江师范学院物理与电子工程学院 黑龙江牡丹江 157000
摘要
采用STM32F103ZET6、OpenMV4和各种传感器模块开发智能送药小车,软件上采用PID控制算法和机器学习,实现小车稳定、准确送药,药房到病房的无接触送药。该方案打破了人工送药的常规认知,以智能硬件为载体,围绕智能医疗实现无接触式药品配送流程,实现智能硬件在医疗领域的创新。
关键词:STM32;OpenMV摄像头;PID算法;多模板匹配
一、项目研究现状与分析
送药车行业是指从事国民经济中送药车相关性质的生产或其他经济社会的经营单位或个体的组织结构体系。国务院发布政策、十三五规划、政府报告、领导讲话等都有对送药车行业做了一些纲领性的指导,合理的解读能够为行业做了好的发展指引。
送药车行业覆盖群体较大,市场空间与产值足够大,好的服务与解决方案必然带来较大的回报,因此行业也越来越受到资本与企业的重视。
二、总体设计
(一)设计原理
采用STM32F103ZET6、OpenMV4和各种传感器模块开发智能送药小车,软件上采用PID控制算法和机器学习
(二)设计方案
其设计方案分为六个模块分别是:单片机开发模块、动力系统模块、车辆寻迹模块、数字识别模块、感应称重模块、工作指示灯模块。
单片机模块设计了外围电路设备的驱动,编写对应单片机软件;动力系统模块采用18650电池、LM2596稳压模块、L298N驱动模块和TT直流电机为小车提供行进的稳定电力;车辆循迹模块采用YJX59CM寻迹漫反射传感器作为寻线模块,该模块可有效识别红外线;数字识别模块由OpenMv4实现,送药小车通过识别数字对相应病房进行送药;感应称重模块采用HX711压力传感器作为药物感应模块,具有集成度高、响应时间短、抗干扰能力强等优点;工作指示灯模块采用红绿灯LED模块显示当前工作状态。
项目研究目标:综合单片机开发,实现智能送药小车。
三、硬件电路设计


四、软件设计

采用PID控制算法和机器学习
智能车的运行是基于传感器提前感知到道路的具体情况, 进而通过内部控制系统发出相应的指令, 做出相应的应对措施, 调整行驶状态, 达到顺利通过的目的。综合现有研究, 智能车的运行状态如下图1所示。
控制器的输入是传感器信息 (道路检测传感器和速度传感器信息) ;输出是执行器件 (舵机和直流电机) 的控制参数。控制器要完成的主要任务有:图像采集、速度测量、图像处理、方向和速度控制。根据任务需要, 控制器中应包含有图像采集模块、引导线提取算法、图像识别算法、脉冲计数模块、定时器模块、速度测量算法、方向控制算法、速度控制算法[1], 如图2所示。
二,智能车的控制算法
2.1 PID参数的影响
采用比例系数kp的目的, 在于通过提升智能车系统的响应速度以提升其调节的精度, 但需要合理控制kp的数值, 不宜过大和过小。积分作用系数ki的作用是消除系统的稳态误差。
需要注意的是应根据智能车的特性设定kd的值, 过大或过小均难以发挥出应有的功效, 影响到系统功能的发挥。
2.2 PID参数整定,
PID算法控制式的任何一个参数的设定均会对智能车的控制效果产生直接影响, 为达到最佳的控制状态, 需要实验过程中尽可能的测试多组数据, 以从中得出最佳参数, 实现最佳控制状态。
PID算法的运用能够达到良好的控制效果。模型车在直道路线行驶过程中, 经过P控制可以减少转向的的灵敏度以快速将车速提升到预定值;在弯道行驶过程中, 经过PD控制并加入微分项, 能够提升转向的灵敏度, 便于模型车能够快速适应不同车道的变化。
六、测试结果分析
为确保测试有效,检查多次确认仿真电路和硬件电路与系统原理图完全相同,且硬件电路无虚焊。
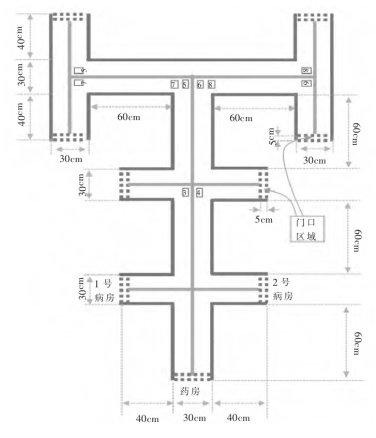
设计如上地图模拟小车送药环境。
小车顺利完成以下两个方面的工作:
(1)药物装卸:通过感应称重以及相关条件的判定从而实现药物在小车上的装卸。
(2)小车往返:通过病房的布置与智能小车的内置的寻迹系统、数字识别系统和陀螺仪稳定相配合,从而实现药物的精准配送。
七、结语
智能送药小车的设计软硬结合,机械结构简单牢固,控制性能好,适应性强,反应灵敏,操作简单,能有效完成送药任务,有利于公共医疗服务行业的现代化,节约人力,对于公共医疗服务行业的智能化有一定的参考价值。
本文得到黑龙江省大学生创新训练项目(S202210233041)的资助。
参考文献:
[1] 童诗白、华成英 模拟电子技术(第5版) 北京 :高等教育出版社 ,2015.
[2] 高吉祥 . 模拟电子线路与电源设计 [M]. 北京 : 电子工业出版社 ,2019

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



