中国船舶集团公司第七一〇研究所,湖北 宜昌 443003
摘要:本文首先阐述了水下滑翔机的运动机理,然后分析了当前主流滑翔机小型化的原因,创新性的提出平衡式浮力驱动技术来解决水下滑翔机大驱动力的问题,扩大了水下滑翔机的运用领域。并对其浮力驱动效率进行分析,结果表明当滑翔机机翼升阻比一定时,选择合适的滑翔角,能使其驱动效率达到最高,为水下滑翔机的设计奠定了基础。
关键词:水下滑翔机;浮力驱动效率;升阻比
1
0 引言
水下滑翔机(Autonomous underwater glider简称 AUG)是一种小型可重复使用的水下航行器,几十公斤的体积重量却能在深海大洋中航行几千公里。水下滑翔机之所以能以娇小的身躯完成穿越大洋的壮举,是依靠浮力驱动的结果。浮力驱动主要特点是浮力可调和重心可变,这种简单低能耗航行原理是由美国海洋学家Henry Stommel[1]于1989年发现的。一些生物学家推测,海豚正是由于具有类似的能力而能够在水下游相当长的距离。在保证自身重量不变的前提下,通过改变排水体积,产生剩余浮力变化,结合高效的流体动力布局,将深度空间上重力或浮力势能,反复转化为前进的动能,通过锯齿状滑行,完成高效率的受控航行。水下滑翔机一经发明就深受科学家和军方青睐,已获得了相当广泛的应用。
近几年国内有多家单位对水下滑翔机的浮力驱动系统进行研究,浮力驱动系统的安装位置和大小对水下滑翔机的工作能力有较大影响。例如天津大学的“海燕”号滑翔机将浮力驱动系统布置在头部,提高了滑翔机的机动性,适用于浅海的测量任务;沈阳自动化研究所的“海翼”号滑翔机将浮力驱动系统布置在艉部,有利于滑翔机滑翔过程中的控制精度和稳定性,适用于深海大深度的观测任务[2];“海燕”[3]和“海翼”[4]的重量都在60kg左右,其浮力改变量为±0.5L。
本文在参考国内外几大典型水下滑翔机设计方案的基础上,分析水下滑翔机小型化的原因,从研究水下滑翔机浮力驱动系统入手,创新性的提出平衡式浮力驱动技术来解决水下滑翔机大驱动力的问题,扩大了水下滑翔机的运用领域,并通过对水下滑翔机浮力驱动效率的分析,得出浮力驱动效率主要受滑翔角和升阻比的影响,为水下滑翔机的后续设计提供了重要参考。
1 滑翔机小型化的原因
表1 几型Glider主要参数性能
型号 | 外形 (m) | 重量 (kg) | 续航力 | 油囊 (L) | 速度 (kn) |
Slocum G2 | Φ0.22×1.5 | 54 | 200+0.25m/s | 0.52 | 0.68 |
Spray | Φ0.215×2 | 51 | 180+0.25m/s | 0.9 | 0.45 |
Seaglider | Φ0.3×1.8 | 52 | 180+0.25m/s | 0.84 | 0.45 |
SeaExplorer | Φ0.25×2.2 | 59 | 60d | 1 | ≤1 |
Exocetus | Φ0.324×2.9 | 109 | 1500km, 30d | 5 | ≥2 |
表1中列举的知名国外水下滑翔机排水体积大都在50L。设计参数如此相近,通过分析发现[5]:
水下滑翔机构成相对简单,50L的体积一般就能满足实现基本功能的要求;
较小的体积更容易适应海水密度在不同水深处带来的剩余浮力的变化。一般,海水密度在千米深度上的变化值约为0.01g/cm3,水面50L的平台壳体排水量在1000m水深处引起的浮力变化量需要约需增加0.5L的油囊体积来补偿。同时平台壳体受压,体积会减小,耐压壳体压缩率与水深呈(1)式近似关系[6]
ΔV=(5~7)×10-6H (1)
式中:ΔV——水深每增加百米每升体积的体积压缩量(L);H——工作水深(m)。
即空气中50L体积在1000m水深处受压减小值约0.25L~0.35L。这样平台壳体剩余浮力的变化量仅为0.15L~0.25L。也就是设计的油囊中只需要预留极小的部分用来平衡补偿海水密度的变化。更先进性的设计就像Seaglider的耐压壳体做成分段波纹管状,壳体受压变形与海水在不同深度上密度差异引起的浮力变化几乎抵消,称之为恒密度壳体。
低速运动时水下滑翔机的水动力系数基本为常数,稳态滑翔速度V与驱动浮力B之间可以用(2)式表达[7]。
![]() (2)
(2)
式中:V——稳态滑翔速度;B——驱动浮力;
α——攻角;ψ——滑翔角;ki——流体动力参数。
求解水平速度最大值所对应的滑翔角,通过水下滑翔机湖上试验得知水平速度和驱动浮力的关系见图1。理论及试验数据均表明水平速度随驱动浮力增大而增大,但水平速度增速随着驱动浮力的增加而减小,说明驱动浮力越小,滑翔效率越高。浮力驱动的推进力是由油囊体积变化转换的,速度增大1倍需要增大4倍油囊体积。

图1水平速度和驱动浮力的关系
可见设计较小的水下滑翔机更能反映出低能耗高效率的本性。普通滑翔机设计重量在50kg左右是比较合适的。
2平衡式浮力驱动技术
对于这种神奇的水下航行器,人们一定会奢求它做更多的工作。广义而言水下滑翔机能完成自主按规划路径航行上千公里到达预定海域,进行长时间深海剖面作业,然后自动返回港口或近岸水域;长距离水下隐蔽运载及负载释放;成批布设在任意深海海域,进行大范围隐蔽侦察、巡逻警戒或以控位游弋模式形成新型水中兵器等功能
[8]。
为实现上述功能,有时候不得不牺牲滑翔机的小巧或高效。比如近岸海域由于河流淡水的注入使得流速和海水密度会产生剧烈变化,当水下滑翔机需要在这里使用时,就必须配置体积较大的油囊或加装推进装置。其实深海大洋中也有定向流速较大的海域,如影响中国周边海域的黑潮,就是西北太平洋上一支最强的边界流,具有流幅窄、流速快、流量大的特征。南海中部,在越南近岸也存在较强的定向流,某潜标观测数据表明,从海面至500m水深处,流速流向基本一致,最大值接近1kn。赤道潜流也属于定向流,海流厚约200m,宽约300km,最大流速高达3kn以上。显然在这些海域,小巧型的Slocum、Spray 与Seaglider是不适用的。为解决这个问题,美海军研究办公室资助了Exocetus近海滑翔机的研制,设计重量约110kg,Exocetus一个显著特点是配置了比普通滑翔机大7倍的油囊,能适应海水密度在很宽的范围内变化,在2kn流的条件下也可以轻松工作。法国正在研制一种称为STERNE水下滑翔机,尾部装有推进器,长4.5 m,最大直径0.6 m,质量990kg,滑翔速度2.5kn,开动推进器时,速度可达3.5kn。中船重工710所研制的组合翼抗流型水下滑翔机C-Glider,采用了平衡式大油囊装置+组合翼的创新结构,设计重量约90kg,配置了3L油囊。除了传统主滑翔翼外,在滑翔机质心位置加装了一对可拆卸的副翼。装上副翼后理论最佳滑翔角22°,升阻比8,可实现更远航程的航行。不装副翼最优滑翔角35°可实现最大水平速度的滑翔运动。2016年8月,加装副翼的C-Glider在南海进行了历时10天的长航程测试,完成159个周期航程超过400km,平均水平滑翔速度超过2kn的适航试验。
大型滑翔机就必须配置较大的浮力驱动装置,大油囊设计关键是如何保证在排回油过程中保持滑翔姿态角相对稳定,即液压油在两者之间来回运动时,基本不产生力矩变化[9]。为保证浮力驱动高效率,最佳的方式是调节控制一次完成,这就需要质心调节、浮力调节和滑翔机升阻比等协调一致。(3)式反映出油从内油箱到外油囊体积变化后,浮力矩和重力矩的平衡关系。
![]() (3)
(3)
式中:X0 (mm)——滑翔机平衡状态浮心位置; X1(mm)——外油囊变化体积中心; X0(mm)——内油箱变化体积中心; ρ1(kg/m3)——液压油密度; ρ2(kg/m3)——水的密度; Vb(m3)——内油箱变化体积; Va (m3)——外油囊变化体积。

图2 水下滑翔机布置图
代值简化得:
![]() (4)
(4)
由(4)式可知,理论上浮力驱动装置的外油囊中心和内油箱中心应布置于滑翔机质心两边,且有一个平衡点,如果滑翔机结构布置设计满足(4)式要求,就可消除液压油来回移动导致的对滑翔角的影响,解决了大型滑翔机设计的关键技术问题,同时也为小型滑翔机以更高航速在大流速海域应用奠定了基础。
3浮力驱动效率
水下滑翔机主要依靠浮力来提供其航行的动力,因此其浮力驱动效率是滑翔机的一个重要参数[10]。在稳定航行状态下取一个完整的上浮下潜周期进行分析,如图3所示。当滑翔机进入定常滑翔时,其稳定速度为V,![]() (5)
(5)
式中:D为航行中受到的阻力,B为净浮力。那么一个周期中浮力驱动输入的功约为![]() ,这里不考虑由于壳体和海水压缩率不同所造成的补偿浮力和由于海面与海底温度不同所造成的浮力损失。
,这里不考虑由于壳体和海水压缩率不同所造成的补偿浮力和由于海面与海底温度不同所造成的浮力损失。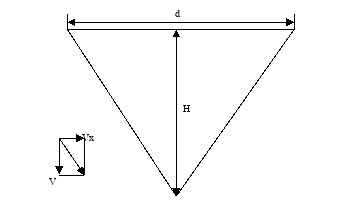
图3 一个完整滑翔周期示意图
水下滑翔机的输出有效功为滑翔机在航行过程中克服水平方向水阻力所做的功。水下滑翔机水平方向的阻力![]() (6)
(6)
式中:![]() 为海水密度,CD为水下滑翔机的阻力系数,SD为水下滑翔机的横断面积,Vx为水下滑翔机的水平速度,又
为海水密度,CD为水下滑翔机的阻力系数,SD为水下滑翔机的横断面积,Vx为水下滑翔机的水平速度,又![]() ,故其水平方向克服水阻有效输出功为
,故其水平方向克服水阻有效输出功为![]() 。
。
其浮力驱动效率![]() ,又稳态滑翔过程中
,又稳态滑翔过程中![]() ,D为水下滑翔机的总阻力,包括主载体的阻力D1和水平滑翔翼产生的阻力D2,L为水下滑翔机的升力,包括主载体的升力L1和水平滑翔翼产生的升力L2。又滑翔机的阻力主要是主载体产生,水平滑翔翼产生的阻力占整体阻力的小部分,且升力主要由水平滑翔翼产生,若忽略机翼产生的阻力,则
,D为水下滑翔机的总阻力,包括主载体的阻力D1和水平滑翔翼产生的阻力D2,L为水下滑翔机的升力,包括主载体的升力L1和水平滑翔翼产生的升力L2。又滑翔机的阻力主要是主载体产生,水平滑翔翼产生的阻力占整体阻力的小部分,且升力主要由水平滑翔翼产生,若忽略机翼产生的阻力,则![]() ,
,![]() 为机翼的升阻比,又
为机翼的升阻比,又![]() ,可得其驱动效率
,可得其驱动效率 ,浮力驱动效率η与滑翔角θ,升阻比λ的关系如图4所示。由图可知,升阻比一定的情况下,浮力驱动效率随着滑翔角的增大先增大后减小,且滑翔角θ在[20,30]浮力驱动效率最高,当浮力驱动效率达到最大,即滑翔角在[20,30]之间,浮力驱动效率随着升阻比的增加而增大,但是当升阻比大于10以后,其增大趋势较缓慢,所以升阻比应选取在[5,10],滑翔机所选机翼升阻比为8。
,浮力驱动效率η与滑翔角θ,升阻比λ的关系如图4所示。由图可知,升阻比一定的情况下,浮力驱动效率随着滑翔角的增大先增大后减小,且滑翔角θ在[20,30]浮力驱动效率最高,当浮力驱动效率达到最大,即滑翔角在[20,30]之间,浮力驱动效率随着升阻比的增加而增大,但是当升阻比大于10以后,其增大趋势较缓慢,所以升阻比应选取在[5,10],滑翔机所选机翼升阻比为8。

图4 浮力驱动效率与滑翔角,机翼升阻比的关系
4结论
本文分析了水下滑翔机小型化的原因,创新性的提出平衡式浮力驱动技术,能够有效的消除在打油期间液压油的来回运动产生的额外力矩对水下滑翔机稳定运动时姿态的影响,为大型滑翔机的设计奠定了基础,使水下滑翔机的应用范围更加广阔。并通过对水下滑翔机的浮力驱动效率分析,得出浮力驱动效率主要受滑翔角和升阻比的影响,选取合适的滑翔角能使其浮力驱动效率达到最高,升阻比越大其浮力驱动效率越高,为水下滑翔机的后续设计提供了重要参考。
1
参考文献:
[1]Stommel H.The Slocum Mission[J] .Oceanography, 1989,2(1): 22-25.
[2]潘光,宋保维,黄桥高等.水下无人系统发展现状及其关键技术[J].水下无人系统学报,2017,25(2):44.51.
[3]王树新,李晓平,王延辉等.水下滑翔器的运动建模与分析[J]. 海洋技术学报, 2005, 24(1): 5-9.
[4]Yu J C, Zhang A Q, Jin W M, et al. Development and Experiments of the Sea-wing Underwater Glider[J]. China Ocean Engineering, 2011, 25(4): 721-736.
[5]孙秀军.混合驱动水下滑翔器动力学建模及运动控制研究[D].天津:天津大学,2011.
[6]李延富,俞建成,封锡盛.深水滑翔机器人耐压壳体结构优化设计[J],海洋工程,2008,11(4).
[7]孙秀军,王雷,桑宏强.Petrel-Ⅱ200 水下滑翔机动力学建模及仿真[J].水下无人系统学报,2019,27(5):480-487.
[8]王延辉.水下滑翔器动力学行为与鲁棒控制策略研究[D]. 天津:天津大学机械工程学院,2007.
[9]张宏伟,李智,王延辉,武建国.水下滑翔器浮力驱动机构布局分析[J],海洋技术,2009,1.
[10]武建国,陈超英,王延辉,张宏伟.水下滑翔器浮力驱动效率分析[J]. 机械工程学报. 2009,4.
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



